Schriftenreihe des Lehrstuhls für Logistikmanagement - Nr. 4 Jahrgang 2019 Digitalisierungsmaßnahmen zur autonomen Selbstorganisation eines ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Schriftenreihe des
Nr. 4
Lehrstuhls für Jahrgang 2019
Logistikmanagement
Kotzab, H. (Hrsg.)
Digitalisierungsmaßnahmen zur autonomen
Selbstorganisation eines Containerterminals
Lücken, Arne; Werth, David; Ehlert, Lars; Meyer, Tim-Mathis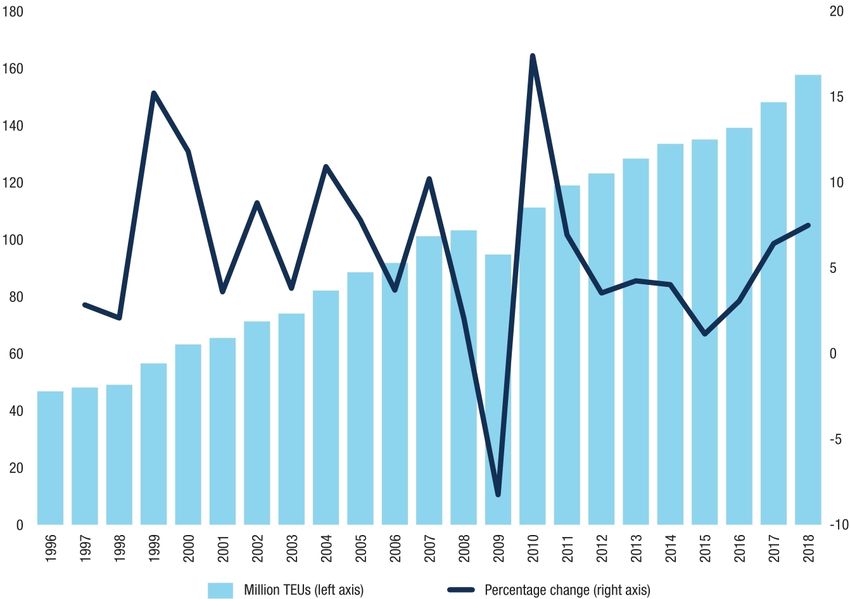
Inhaltsverzeichnis
Inhaltsverzeichnis I
Abbildungsverzeichnis III
Tabellenverzeichnis IV
Abkürzungsverzeichnis V
1 Einleitung 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Zielsetzung und Forschungsfragen . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Theoretische Grundlagen 3
2.1 Grundsätzliches über ein Containerterminal . . . . . . . . . . . . . . . . . . . 3
2.2 Autonomie und fahrerlose Transportsysteme . . . . . . . . . . . . . . . . . . . 4
2.3 Intelligent Transportation Systems (ITS) . . . . . . . . . . . . . . . . . . . . . 5
2.4 Informationstechnologien und Digitalisierungsmaßnahmen . . . . . . . . . . . 7
2.4.1 Internet of Things . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.2 RFID-Plattformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4.3 Sensornetzwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4.4 CPS und M2M . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.5 Kommunikationstechnologien . . . . . . . . . . . . . . . . . . . . . . 10
2.4.6 Multi-Agent-System . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3 Methodischer Zutritt 12
3.1 Übersicht und Vorgehensweise . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Workshop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3 Erläuterung der Methoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3.1 Cognitive Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.3.2 SWOT-Analyse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
I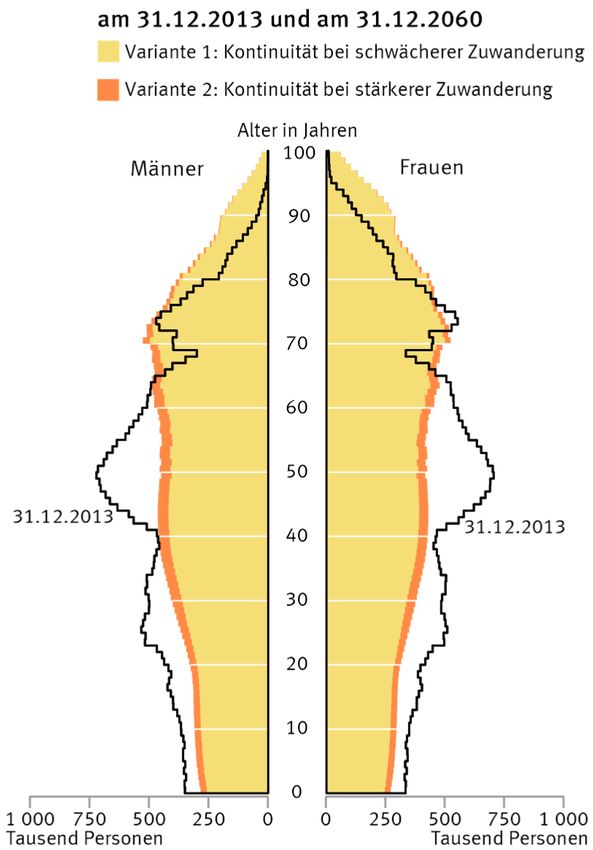
4 Ergebnisse 14
4.1 Cognitive Map über die Subsysteme der Hafenlogistik . . . . . . . . . . . . . 14
4.2 Fallbeispiele der Hafendigitalisierung . . . . . . . . . . . . . . . . . . . . . . 15
4.2.1 Hyperkonvergente Infrastruktur . . . . . . . . . . . . . . . . . . . . . 15
4.2.2 Virtuelles Replikat und Ankunftsheuristiken des Hafens Rotterdam . . 16
4.2.3 Hyperloop-Projekt im Hamburger Hafen . . . . . . . . . . . . . . . . 16
4.2.4 Hamburg smartPORT . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.3 SWOT-Analyse zur Einführung von Digitalisierungsmaßnahmen . . . . . . . . 18
4.3.1 Stärken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.2 Schwächen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.3.3 Chancen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3.4 Gefahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Diskussion der Ergebnisse 22
5.1 Sozioökonomische Faktoren . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2 Konkurrenzsituation deutscher Seehäfen . . . . . . . . . . . . . . . . . . . . . 24
5.3 Breitband- und Mobilfunknetzausbau in Deutschland . . . . . . . . . . . . . . 26
5.4 Digitale Sicherheitsrisiken . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6 Fazit 29
6.1 Beantwortung der Forschungsfragen . . . . . . . . . . . . . . . . . . . . . . . 29
6.2 Schlussfolgerungen und Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . 29
Literaturverzeichnis A
IIAbbildungsverzeichnis
Abbildung 1 Globaler Containerhandel 1996-2018 (UNCTAD, 2018) . . . . . . . . . . 1
Abbildung 2 Container Terminal System (Steenken et al., 2004) . . . . . . . . . . . . . 5
Abbildung 3 Cyber-Physical-Systems für vernetzte Mobilität durch verteiltes Verkehrs-
management (Hellinger und Deutsche Akademie für Technikwissenschaf-
ten, 2011) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Abbildung 4 Subsysteme eines Containerterminals (eigene Darstellung) . . . . . . . . 14
Abbildung 5 Altersaufbau der Bevölkerung in Deutschland am 31.12.2013 und am
31.12.2060 (Statistisches Bundesamt, 2015) . . . . . . . . . . . . . . . . 23
Abbildung 6 Anteil von Glasfaseranschlüssen an allen stationären Breitbandanschlüssen
in ausgewählten Ländern der OECD im Juni 2017 (Skala, 2018) . . . . . 27
Abbildung 7 Geplante Investitionen in der deutschen Logistik-Branche im Jahr 2018
(SCI Verkehr, 2018) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
IIITabellenverzeichnis
Tabelle 1 Informatiostechnologien als Enabler für Digitalisierung (Jahn und Saxe,
2017) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Tabelle 2 Umschlagsvolumen Seehäfen 2017 (Lloyd’s List, 2018; Stadt Wilhelmsha-
ven, 2018) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Tabelle 3 SWOT-Analyse zur Einführung von Digitalisierungsmaßnahmen . . . . . 18
IVAbkürzungsverzeichnis
4G Fourth Generation
5G Fifth Generation
AGV Automated Guided Vehicle
AI Augmented Intelligence
ALV Automated Lifting Vehicle
App Application
BSD Berkeley Software Distribution
CEO Chief Executive Officer
CPS Cyber-Physical-System
CT Containerterminal
CTA Containerterminal Altenwerder
DLC Dual Load Carrier
EC Electronic Cash
ECDIS Electronic Chart Display & Information System
EPC Electronic Product Code
EPCIS Electronic Product Code Information Services
ERTICO European Road Transport Telematics Implementation Coordination
Organisation-Intelligent Transport Systems & Services Europe
FTS Fahrerlose Transportsysteme
GPS Global Positioning System
HCI Hyperconvergent infrastructure
HHLA Hamburger Hafen und Logistik AG
HPA Hamburg Port Authority
HTT Hyperloop Transportation Technologies
IoT Internet of Things
ISC Integrated Ship Control
ISETEC Innovative Seehafentechnologien
IT Informationstechnik
ITS Intelligent Transportation Systems
JPEG Joint Photographic Experts Group
LTE Long Term Evolution
M2M Machine-to-Machine
MAS Multi-Agent-System
MLC Multi Load Carrier
MOS Maritime Operational Systems
NHS National Health Service
NSA National Security Agency
VOECD Organisation for Economic Cooperation and Development
ÖPNV Öffentlicher Personennahverkehr
PDF Portable Documents Format
QC Quay Cranes
RFID Radio-Frequency Identification
RIS River Information Systems
RMG Rail Mounted Gantry Cranes
RTG Rubber Tired Gantry Cranes
SLC Single Load Carrier
SPL SmartPORT Logistics
SWOT Strenghts, Weaknesses, Opportunities, Threats
TEU Twenty-foot Equivalent Unit
TLS Terminal Logistik und Steuerung
VTMS Vessel Traffic Management Systems
VI1 Einleitung
1.1 Motivation
Der internationale Seegüterverkehr ist mit einem Containeraufkommen von 10,7 Milliarden
Tonnen im Jahre 2017 eine der wichtigsten Transportarten und somit integraler Bestandteil der
Supply Chain einer jeden internationalen Unternehmung. Im selben Jahr erfuhr der maritime
Handel mit 4% den größten Aufschwung seit fünf Jahren, was mit dem generellen Wachstum der
Weltwirtschaft einherging (UNCTAD, 2018). Für Seehäfen und Containerterminals bedeuten
diese Zahlen eine sich jährlich erhöhende Auftragslage und Umschlagsmenge. Somit stellen sich
fortwährend neue Anforderungen für dessen Bewältigung und es bedarf neuartiger Maßnahmen
und Lösungen dazu, die wiederum neue Chancen und Risiken bergen. Diese Erkenntnis fordert
nicht nur einen effizienteren Umgang mit den eigentlichen Güterflüssen, sondern auch mit den
umfangreicheren Informationsflüssen internationaler Korrespondenz. Der Fokus dieser Ausarbei-
tung liegt folglich auf dem Umschlag und der Informationsverarbeitung an Containerterminals
und den damit unmittelbar in Kontakt stehenden Akteuren der Lieferkette.
Abbildung 1: Globaler Containerhandel 1996-2018 (UNCTAD, 2018)
Weitere Beachtung erfährt die fortbeständige und nachhaltige Entwicklung der Wettbewerbstaug-
lichkeit deutscher Seehäfen und somit auch des gesamten Wirtschaftsstandortes Deutschland. Vor
dem Hintergrund des rapide wachsenden internationalen Wettbewerbs kommt dessen Zukunft als
1vergangener Exportweltmeister und viertstärkster Volkswirtschaft der Welt (World Bank, 2018)
eine besondere Rolle zu, sich auch weiterhin im Außenhandel stabil zu positionieren. Gerade
in Anbetracht etwaiger Vorhaben wie beispielweise der Belt and Road-Initiative der Volksre-
publik China, welche mit einem Etat von über einer Billion US-Dollar dotiert ist und auf den
globalen Ausbau von Handelsrouten und Verkehrsknotenpunkten abzielt (Kuo und Kommenda,
2018), steigt die Relevanz, mit eben jenen Partnern auch fortan effizienten Handel betreiben zu
können. Hinzu kommt, dass die Häfen Rotterdam und Antwerpen jährlich mehr Anteile des in
Nordeuropa umgeschlagenen Containeraufkommens übernehmen (NDR, 2018). Gleichermaßen
sollte es das Ziel einer hochentwickelten Informationsgesellschaft bleiben, sich auch zukünftig
innovationstechnisch von konkurrierenden Nationen abzuheben.
1.2 Zielsetzung und Forschungsfragen
Das Schlagwort Industrie 4.0, die jedwede Digitalisierungs- und Vernetzungsmaßnahme im
Rahmen unternehmerischer Tätigkeiten umfasst, wird derzeit als nächste Stufe in der Reihe der
industriellen Revolution gehandhabt (Bundesverband der deutschen Industrie, 2018). Hauptziel
dieser Ausarbeitung ist die Bestandsaufnahme aktueller Zustände und die Entwicklung zukunfts-
orientierter Lösungsansätze zur effizienteren Organisation und prozessoptimierten Abwicklung
des Umschlags an deutschen Seehäfen im Rahmen des Oberthemas Intelligent Transporta-
tion Systems. Die vorgestellten technologischen Konzepte sollen Zeitersparnisse in Bezug auf
Korrespondenz, Auftragsabwicklung, Informationsübertragung und Be- und Entladezeiten von
Containerschiffen durch Optimierung der Auslastung jeglicher beteiligter Maschinen und Förder-
mittel bewirken und somit zur insgesamten Produktivitätssteigerung eines Containerterminals
beitragen. Abstrahiert ergeben sich folgende Forschungsfragen:
• Was bedeutet autonome Selbstorganisation der Hafenlogistik und wird sie bereits
angewandt?
• Welche neuartigen Digitalisierungsmaßnahmen kommen für die Hafenlogistik in Be-
tracht und besteht die Anwendungsmöglichkeit an deutschen Seehäfen?
1.3 Aufbau
Das nachfolgende Kapitel 2 beginnt mit der Auseinandersetzung mit den theoretischen Grund-
lagen zur autonomen Selbstorganisation, um ein solches Vorhaben bewerkstelligen zu können.
In Kapitel 3 und 4 erfolgt der methodische Zugang zur Entwicklung von Lösungsansätzen
unter Einbezug der Ergebnisse eines studentischen Workshops über die Digitalisierungsthematik.
Kapitel 5 beschäftigt sich mit der Diskussion der Ergebnisse darüber, ob und wie genau die
entwickelten Szenarien und Lösungsansätze an deutschen Seehäfen umgesetzt werden könnten
und welche konkreten lokalen Beschränkungen diesem Vorhaben entgegengestellt sind. Die
Schlussfolgerungen und das Fazit in Kapitel 6 runden diese Arbeit ab.
22 Theoretische Grundlagen
2.1 Grundsätzliches über ein Containerterminal
Bis in die 60er Jahre des 20. Jahrhunderts erforderte die Heterogenität von Transportladungen
bzw. Gütern individuelle Verpackungen und Zusammenfassungen von Ladungen. Der Großteil
der für das Verfrachten von Gütern über den Seeweg veranschlagten Zeit musste für Beladung,
Umschlag und Löschen der Ladung einkalkuliert werden. Durch die Verwendung von Contai-
nern im zweiten Weltkrieg erkannte der amerikanische Unternehmer Malcom McLean dessen
Potenzial für die zivile Logistik (Meier, 2009). McLeans Idee vom Standardcontainer setzte
sich über die letzten 50 Jahre global durch, sodass im Jahre 2009 90% aller maritim bewegten
Güter, ausgenommen der Transport von Massengütern durch sogenannte Bulker, in Containern
verschifft wurden (Suárez-Alemán et al., 2016). Nähere Betrachtung erfährt hier das Container-
terminal als Knotenpunkt der Maritimen- und Hinterlandlogistik. Containerterminals werden,
im Sinne der logistischen Systemtheorie, als ein System mit zwei Schnittstellen beschrieben.
Offensichtlich ist die maritime Schnittstelle, die Beladung und Löschung von Containerschiffen.
Die zweite Schnittstelle stellt der hauptsächlich landgebundende Güteran- und Abtransport dar
(Meier, 2009). Des Weiteren ist ein Abgleich mit den in der Literatur beschriebenen Grundfunk-
tion eines Containerterminals möglich, um es als solches zu klassifizieren. Als entsprechende
Grundfunktionen nennt die Literatur drei Hauptfunktionen, welche sich aufschlüsseln lassen zur
Transportfunktion (der Transport von Containern innerhalb des Terminals), Transferfunktion
(Weiterverschiffung von Containern) und der Speicherfunktion (Einlagerung von Containern für
verschiedene Zeiträume). Bei jedem Containerterminal spielen diese Funktionen zusammen, die
Art des Zusammenwirkens kann jedoch variieren (Kim und Günther, 2007). Ziel ist es, verfügbare
Ressourcen während der Liegezeit eines Schiffes möglichst effizient einzusetzen, die Kosten
pro abgefertigter TEU (Twenty-foot Equivalent Unit) gering zu halten und nach Möglichkeit zu
reduzieren (Henesey et al., 2003).
Neue Technologien dienen der stärkeren Vernetzung mehrerer Seehäfen und deren Verknüpfungen
mit dem Hinterland. Sie stellen nicht nur einen zentralen Knotenpunkt für den Güterumschlag,
sondern auch für den Logistikdatenfluss dar (Klein, 2007). Herausforderungen aus logistischer
Sicht liegen bisweilen in der Integration von ganzheitlichen Hafenlogistiksystemen, da die
wenigen verfügbaren Standardprogramme lediglich für einzelne Funktionen konzipiert sind. Pro-
gramme zur ganzheitlichen Steuerung, wie beispielsweise sogenannte Multi-Agenten-Systeme,
existieren als Individuallösung jeweils für einzelne Häfen (Henesey et al., 2003) und werden im
weiteren Verlauf noch behandelt.
Ein potentieller Hafenstandort definiert sich durch verschiedene Eigenschaften, in die Planung
werden sowohl positive als auch negative Faktoren einbezogen. Positive Standortfaktoren sind
beispielsweise bebaubarer Boden und gute Infrastrukturanbindung. Als negativ kann sich unter
3anderem eine hohe Flutgefahr oder vorhandener Morast erweisen. Da die Nordostpassage, die
über die Beringstraße nach Südostasien führt, noch nicht durchgängig befahrbar ist, liegen die
großen deutschen Häfen an der sogenannten Nordrange (Göpfert und Braun, 2013). In Deutsch-
land übernimmt der Bund die Verantwortung für Seewege, Vertiefungen und deren Sicherung.
Die Bereitstellung von Infrastruktur ist Länderaufgabe, dazu zählt auch die Unterhaltung des
eigentlichen Hafenbeckens (Wowries, 2008). Der Ausbau von Containerhubs erfordert meist auch
sekundäre Investitionen in die Infrastruktur beziehungsweise Hinterlandanbindung, so mussten
beispielsweise beim Bau des Wilhelmshavener JadeWeserPorts Fahrrinnenanpassungen in Weser
und Elbe getätigt werden. Der Stellenwert guter Infrastrukturanbindung endet nicht bei der
unmittelbaren lokalen Wirtschaft der deutschen Tiefseehäfen, sondern ist als Drehscheibe auch
für Ost- und Südosteuropa relevant. Herausforderungen stellen in Deutschland beispielsweise
Planfeststellungsverfahren dar, die mehrere Jahrzehnte andauern können. Dem schnellen Wandel
und Wachstum der maritimen Logistik hin zur massiven computergestützten Steuerung und bes-
seren strategischen Koordination der deutschen Tiefseehäfen geschuldet, hat die Bundesrepublik
Deutschland die Förderprogramme ISETEC I und II (Innovative Seehafentechnologien) initiiert
(Baumgarten, 2008).
2.2 Autonomie und fahrerlose Transportsysteme
Was bedeutet Autonomie im technologischen Kontext? Der aus dem Altgriechischen stammende
Begriff „Autonomie“ (griech. autonomia, lat. autonomia) setzt sich aus den Begriffsteilen autós
(selbst) und nomós (Gesetz) zusammen. Ins Deutsche ist der Begriff mit Selbstbestimmung,
Selbstgesetzgebung sowie Eigengesetzlichkeit übersetzbar (Pohlmann, 1971). George A. Bakey
(2005) attestiert, dass technologische Autonomie sich auf Systeme bezieht, die in Umgebungen
der realen Welt ohne externe Kontrolle für einen längeren Zeitraum operieren können.
Die ersten fahrerlosen Transportsysteme (FTS) wurden bereits in den 1950er Jahren in den
USA entwickelt. Bei dem dort eingesetzten FTS handelte es sich um einen Schleppzug, dessen
Anwendungsbereich in der innerbetrieblichen Logistik lag. Die zu der Zeit üblichen Schlepp-
züge wurden über Schienen geführt. Hierbei kam jedoch die damals neuartige Technologie der
induktiven Spurführung zum Einsatz. Bei induktiver Spurführung wird das FTS mit Sensoren
ausgestattet, die sich an im Boden eingelassenen Magneten orientieren (Ullrich, 2014). Die
Entwicklung der Automatisierung von Transportsystemen wird in vier Epochen unterteilt. Um
die Jahrtausendwende, zur Zeit der dritten Periode, setzten viele Containerterminals bereits auf
einen gewissen Grad an Automatisierung. Bei den verwendeten Gerätschaften gibt es weitere
Unterteilungen. Die erste Unterteilung erfolgt in Transport- und Stapelgeräte. Bei Stapelgeräten
handelt es sich zunächst um so genannte Kaikräne (quay cranes, QC) bzw. Containerbrücken.
Die Aufgabe der Kaikräne ist das Beladen und Löschen der Schiffe. Sie operieren auf Schienen
und bewegen sich langsam entlang der Kaimauer. Zudem verfügen sie über eine sogenannte
Laufkatze, welche über die gesamte Schiffsbreite reichen. Des Weiteren gibt es Kräne mit einer
4Zweischienenkatze. Diese Technik bewirkt jedoch nur eine Teilautomatisierung. Während die
Hauptkatze, die das Schiff be- und entlädt, manuell von einem Kranführer gesteuert wird, kann die
Portalkatze vollständig automatisiert werden. Diese hat die Aufgabe, die Transportfahrzeuge zu
beladen (Speer, 2017). Aufgabe des Lagerkrans ist die Beförderung der Container zum Lagerort
am Terminal. Seine Prozesse unterteilen sich in Einlagerung, Auslagerung, Umstapelung und
Umlagerung.
Lagerkräne gibt es in verschiedenen Ausführungen. Hier wird zwischen Rail Mounted Gan-
try Cranes (RMG) unterschieden, welche schienengeführt sind und den Rubber Tired Gantry
Cranes (RTG), welche bereift sind. Beide Versionen existieren in vollautomatisierten Ausfüh-
rungen (Speer, 2017). Als letztes werden die Flurfördergeräte genannt, die zwischen aktiven
und passiven Geräten zu unterscheiden sind. Aktiv sind die sogenannten Automated Lifting
Vehicle (ALV), bei denen es sich um Van Carrier oder auch Straddle Carrier handelt. Sie können
aufgrund ihrer Konzeption selbstständig Container aufnehmen und diese transportieren. Die
Automated Guided Vehicle (AGV) hingegen sind passive Flurfördergeräte. Es kann hier zwischen
Single Load Carriern (SLC) und Dual Load Carriern (DLC) bzw. Multi Load Carriern (MLC)
unterschieden werden. Sie sind darauf angewiesen, dass ein Kran ihnen den Container aufsetzt
bzw. abnimmt (Lehmann, 2007). Zusammenfassend wird durch die eben genannten Gerätschaften
nur ein gewisser Grad an Automatisierung ermöglicht. In den folgenden Unterkapiteln werden
also Überlegungen aufgeführt, diese in ein autonom agierendes Umfeld zu integrieren.
Abbildung 2: Container Terminal System (Steenken et al., 2004)
2.3 Intelligent Transportation Systems (ITS)
Der Begriff Intelligent Transport Systems (ITS) ist mit dem deutschen Begriff Verkehrstelematik
gleichzusetzen. Er wird verwendet, um den Einsatz von Informations- und Kommunikationstech-
nologien im Verkehrsbereich zu definieren, welche einen Echtzeitfluss von Informationen und
Daten schaffen, eine intelligentere Nutzung von Infrastrukturen und Fahrzeugen ermöglichen
5und das Verkehrs- und Mobilitätsmanagement verbessern (Giannopoulos, 2004). ITS im Allge-
meinen zielen auf die Optimierung und sinnvollen Gestaltung der Infrastruktur für Verkehrsmittel
und der Verkehrsfläche ab. Ursprüngliche Ziele sind beispielsweise vorhandene Ressourcen
und Energie einzusparen beziehungsweise möglichst effizient einzusetzen, Verkehrswege und
Parkraum zu optimieren, die Verkehrssicherheit zu erhöhen, die Straßen- und Umweltbelastung
zu senken sowie die Mobilität zu sichern (Moerke and Walke, 2007). Die Entwicklungsarbeit
an ITS begann in Japan und den USA in den späten 1980er Jahren mit dem Ziel, nationale
intelligente Straßenverkehrssysteme aufzubauen. Das Hauptaugenmerk lag hierbei zunächst auf
der Erhöhung der Sicherheit des Straßenverkehrs (Pietrzykowski, 2010). In Europa ist insbeson-
dere die 1991 gegründete European Road Transport Telematics Implementation Coordination
Organisation-Intelligent Transport Systems & Services Europe (ERTICO) für Forschung- und
Entwicklungsarbeit in diesem Segment verantwortlich (ERTICO, 2018). ERTICO hat die Vision,
mit Hilfe von ITS eine intelligente Mobilität mit voll informierten Menschen ohne Unfälle, Verzö-
gerungen und mit geringeren Auswirkungen auf die Umwelt zu schaffen. Dabei sollen die Dienste
erschwinglich und nahtlos, der Datenschutz respektiert und die Sicherheit gewährleistet sein.
ITS wird als Forschungsgebiet mit hohem Potenzial gesehen, welches Lösungsmöglichkeiten für
viele Herausforderungen bietet, mit denen der Verkehrssektor konfrontiert ist. Diese bestehen kei-
nesfalls nur innerhalb der einzelnen Verkehrsträger, sondern insbesondere bei der Schaffung von
Schnittstellen zwischen den Verkehrsträgern beziehungsweise bei der Integration innerhalb dieser.
Neben der Infrastruktur gilt ITS als der wichtigste Faktor, mit dem die Zusammenarbeit zwi-
schen den verschiedenen Verkehrsträgern und die Schaffung eines nahtlosen Verkehrssystems,
anhand der Ziele von ERTICO, in ganz Europa erreicht werden kann. Die einzelnen Subsysteme
werden von ERTICO unterteilt in Verkehrs- und Reiseinformationen, Verkehrs- und ÖPNV-
Management, Navigationsdienste, Smart Ticketing und Gebühreneinzug, Transportsicherheit
und -sicherung, Güterverkehr und Logistik (einschließlich Stadtlogistik), intelligente Mobilität
und Co-Modalitätsdienste, Umwelt- und Energieeffizienz (einschließlich Elektromobilität). Der
Bereich Schifffahrt wird hauptsächlich unter dem Aspekt Verkehrs- und ÖPNV-Management
betrachtet. Dementsprechend gibt es in fast allen wichtigen maritimen Regionen der EU, insbe-
sondere in der Nähe großer Häfen, beispielsweise Vessel Traffic Management Systems (VTMS),
die den Schiffsverkehr koordinieren. Andere Konzeptionen zum Management und zur Kontrolle
des Seeverkehrs werden bezeichnet als Maritime Operational Systems (MOS), Integrated Ship
Control (ISC), Electronic Chart Display & Information System (ECDIS) und River Information
Systems (RIS) (Giannopoulos, 2012). Die aufgeführten Systeme dienen beispielsweise dem
Fracht- und Flottenmanagement, dem Schiffsverkehrsmanagement, dem Sicherheits- und Scha-
denskontrollmanagement sowie der Verwaltung von Informationen für Reeder, Schiffsagenten
und Schiffskommandanten, Reisenden, Verwaltungsbehörden und anderen Interessengruppen.
Eine Besonderheit bei der Etablierung solcher Systeme ist der spezifische und internationale
Charakter des Seeverkehrs. So müssen, anders als beispielsweise bei Einrichtung neuer Lösungen
im Straßengüterverkehr, hier die geltenden rechtlichen Rahmenbedingungen vieler beteilig-
6ter Staaten berücksichtigt und die Genehmigungen internationaler Gremien eingeholt werden
(Pietrzykowski, 2010).
2.4 Informationstechnologien und Digitalisierungsmaßnahmen
2.4.1 Internet of Things
Ein Containerumschlag ist mit der Verarbeitung erheblicher Informationsmengen verbunden. Die
zuständige Behörde erhält Daten darüber, wann Schiffe und Ladeeinheiten antreffen, in welchem
Zeitfenster sie abgefertigt werden sollen und welche Gegebenheiten dabei berücksichtigt werden
müssen. Um den Informationsaustausch innerhalb der Terminalaktivitäten sowie zwischen den
unmittelbar vor und nachgelarten Akteuren der Lieferkette zu erleichtern, existieren neuartige
Informationstechnologien. Als Grundbaustein der Überlegungen dient die Begrifflichkeit Internet
of Things (IoT), im Deutschen auch direkt als Internet der Dinge bezeichnet. Im Mittelpunkt
des IoT steht die umfassende Vernetzung von Geräten, Systemen und Diensten innerhalb der
bestehenden Internetinfrastruktur. Der Wert des IoT liegt darin, dass es dazu in der Lage ist, die
von den Sensoren an den Endpunkten der angeschlossenen Geräte erhaltenen Daten zu erfassen
und zu analysieren (Nguyen und De Cramer, 2016). Für Unternehmen erweist sich das IoT in
vielen verschiedenen Kategorien als nützlich, darunter Asset-Tracking und Bestandskontrolle,
Sicherheit, individuelle Verfolgung, Versand und Standort sowie Energieeinsparung (Nguyen
und De Cramer, 2016). Der Kern des IoT ist die Idee, internetfähige Gegenstände miteinander zu
verbinden, um eine direktere Integration zwischen der physischen Welt und computergestützten
Systemen zu schaffen (De Cramer et al, 2017). Mitarbeiter, Sensoren und Anwendungen kom-
munizieren und kooperieren in Echtzeit in zukünftigen Logistiksystemen über das Internet der
Dinge. Digitale Cloud-Plattformen ermöglichen es den Nutzern, Vorteile wie schnellere Verarbei-
tungsgeschwindigkeiten, Zugänglichkeit, unbegrenzte Speicherkapazitäten und geringere Kosten
als bei der Verwendung eigener Systeme zu nutzen (Jahn und Saxe, 2017).
Schätzungen der NCTA zufolge sollen bis zum Jahre 2020 über 50 Milliarden Geräte Bestand-
teil des IoT sein, da neben Endgeräten wie Tablets und Smartphones immer mehr alltägliche
Gegenstände wie elektrische Zahnbürsten über eine eigene IP-Adresse verfügen (NCTA, 2015).
Die dabei entstehenden hohen Datenmengen und deren Vielfalt werden gemeinhin als Big Data
betitelt (Müller et al., 2018).
Das IoT stellt für sich betrachtet jedoch nur einen Sammelbegriff vieler interoperabler Techno-
logien dar. Tabelle 1 listet die nach Jahn und Saxe (2017) für die digitalisierte Hafenlogistik
relevanten Subsysteme des IoT auf.
7Tabelle 1: Informatiostechnologien als Enabler für Digitalisierung (Jahn und Saxe, 2017)
Available Internet of Things solutions founding technologies for the Internet of Things
RFID tags and readers
RFID platforms
EPC global networks
Sensor networks Sensors
Cloud-computing
Pervasive computer platforms
Cloud of Things
Embedded systems
Cyber-physical systems
Automated and autonomous systems
Wireless communication protocols
Machine-to-Machine systems
Fog computing
2.4.2 RFID-Plattformen
RFID (radio-frequency identification)-Plattformen spielten eine eine zentrale Rolle bei der Ent-
stehung des IoT. Sie ermöglichen den kontaktlosen Austausch von Informationen zur Steuerung
und Verfolgung von den zu identifizierenden Objekten. Heutzutage werden sie beispielsweise
flächendeckend in EC-Karten zur bargeldlosen Zahlung eingesetzt. Grundsätzlich besteht ein
RFID-System aus einem Transponder, einem Lesegerät und einem Informationssystem, das das
Auslesen und Beschreiben der Transponder steuert (Tamm und Tribowski, 2010). Der Transponder
(Tag) wird am Zielobjekt befestigt. Das Lesegerät (Reader) kann mittels eines Radiofrequenzmo-
duls, einer Speichereinheit und einer Antenne die jeweilige Kennung des Transponders auslesen.
Je nach Bauart und Klassifizierung ist das Tag selbst mit einer integrierten Batterie ausgestattet
oder wird vom Reader über dessen Antenne mit Energie versorgt. Die batterielosen (passiven)
Tags überliefern ausschließlich dann Informationen, wenn sie vom Reader erfasst werden. Neue
objektrelevante Informationen können auch direkt auf befähigte Transponder geschrieben werden
(Tamm und Tribowski, 2010). In Verbindung mit den Electronic Product Code Information
Services (EPCIS) werden die Limitierungen konventioneller Kennzeichnungsmethoden über-
wunden. Hierzu dient der Electronic Product Code (EPC), womit jedem Objekt eine weltweit
einzigartige Kennung mit Informationen wie Hersteller und Seriennummer zugewiesen wird
und diese dann im EPCglobal-Netzwerk gelistet werden, auf das von unternehmensspezifischen
Verwaltungsanwendungen zugegriffen werden kann (Tamm und Tribowski, 2010). Aufgrund
der Kompaktheit und des geringen Kostenrahmens für Transponder im Centbereich bieten sich
RFID-Plattformen bestens zur Kennzeichnung von Containern und untergeordneten Ladeein-
heiten von Gütern an. Die Signalreichweite von RFID-Plattformen kann im sogenannten Super
High Frequency-Frequenzband bis zu 10 Meter erreichen (Tamm und Tribowski, 2010).
2.4.3 Sensornetzwerke
Sensoren messen physische, chemische, biologische, elektrische, magnetische, optische, radiolo-
gische oder thermische Signale der Zielobjekte. Die Vernetzung einer hohen Anzahl an Sensoren
zu sogenannten Sensornetzwerken ermöglichen die Anfertigung umfassender Messergebnisse,
8die über ein CPS weitergeleitet werden und somit die Kontrolle über den adäquaten Umgang mit
beispielsweise zerbrechlichen oder Gefahrgütern erleichtern (Jahn und Saxe, 2017).
2.4.4 CPS und M2M
Hellinger und Deutsche Akademie der Technikwissenschaften (2011) beschreiben Cyber-Physical
Systems (CPS) als Systeme mit eingebetteter Software als Teil von Geräten, Gebäuden, Verkehrs-
wegen, Verkehrsmitteln, Produktionsanlagen, medizinischen Prozessen, Logistik-, Koordinations-
und Managementprozessen. Über die oben beschriebenen Sensornetzwerke sind CPS dazu in der
Lage,
• unmittelbare physikalische Daten zu erfassen und durch Aktoren auf physikalische Vor-
gänge einzuwirken
• erfasste Daten auszuwerten und zu speichern und aktiv oder reaktiv mit der physikalischen
sowie der digitalen Welt zu interagieren
• über digitale Kommunikationseinrichtungen untereinander sowie in globalen Netzen ver-
bunden zu sein (drahtlos/kabelgebunden, lokal/global)
• weltweit verfügbare Dienste zu nutzen
• über eine Reihe dezidierter, multimodaler Mensch-Maschine-Schnittstellen zu verfügen.
Somit besetzt das CPS eine zentrale Position in einem Feld mit nahezu unbegrenzter Einsatzbreite
für vernetzte Mobilität, automatisierter und ressourceneffizienterer Produktion. Einer der größten
Vorteile von CPS liegt in der Virtualität dieser Systeme, weshalb deren Funktionen in weiten
Bereichen unabhängig von Materialien, Orten und Geräten sind und trotzdem ein Bild der Realität
schaffen (Hellinger und Deutsche Akademie der Technikwissenschaften, 2011). Während das
IoT ein eher abstrakter Begriff für die ubiquitäre globale Vernetzung aller befähigten Geräte und
Dienstleistungen ist, operieren CPS in gezielteren Anwendungsfeldern und müssen nicht zwangs-
läufig mit dem globalen Internet verbunden sein. Aufgrund der vielfältigen Anwendungsbereiche
bestehen deshalb Schnittmengen der Definitionen.
Wan et al. (2013) betrachten CPS als eine Evolutionsstufe der Machine-to-Machine communi-
cation (M2M), das dessen einseitigen Fokus von der reinen Kommunikation zwischen zwei
Maschinen überholt und zusätzliche Parameter aus mehrdimensionalen Netzwerken sensorischer
Daten berücksichtigt.
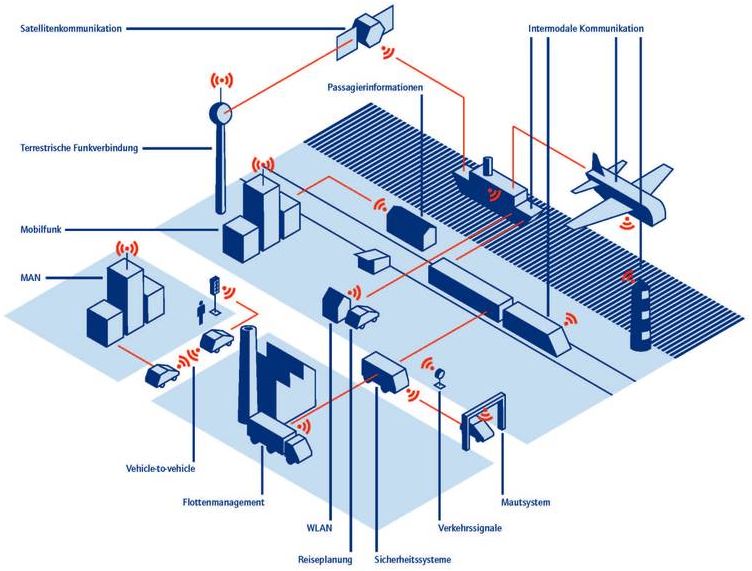
9Abbildung 3: Cyber-Physical-Systems für vernetzte Mobilität durch verteiltes
Verkehrsmanagement (Hellinger und Deutsche Akademie für Technikwissenschaften, 2011)
2.4.5 Kommunikationstechnologien
Um die Funktionalität der oben genannten Technolgien zu gewährleisten, bedarf es einer gut
ausgebauten und stabilen Netzwerkinfrastruktur. Neben konventionellen kabelgebundenen Breit-
bandanschlüssen werden für die weitläufigen Flächen eines Containerterminals verlässliche
mobile Kommunikationssysteme benötigt. Der chinesische Telekommunikationsausrüster Hua-
wei nimmt als wichtiger Beitragender zur Spezifikation des 5G (fifth generation)-Standards
hierbei eine Pionierposition ein. Huawei berichtet, dass eine Latenz von 50 ms, wie sie momentan
im 4G Long Term Evolution (LTE)-Standard dotiert ist, nicht ausreichend für geschwindigkeits-
kritische Operationen wie beispielsweise die Fernsteuerung von selbstfahrenden Kraftfahrzeugen
sei. Im 4G-Netz müsste ein Auto bei einer Geschwindigkeit von 100 km/h noch 1,4 Meter zu-
rücklegen, bis ein Bremssignal verarbeitet würde. Selbiges gelte folglich auch für die Operation
von AGVs und anderen Fördermitteln bei Fernsteuerung, was gleichzeitig die Notwendigkeit
schnellerer Netze für den Verkehr der Zukunft belegt. Bei einer Latenz von nur 1 ms und einer
möglichen Bandbreite von 10 Gigabit/s im 5G-Netz würde ein Auto in diesem Falle nur 2,8 cm
zusätzliche Strecke benötigen (Huawei, 2018). Insbesondere anzumerken sind aktuelle Bestre-
bungen der Hamburg Port Authority in Kooperation mit Huawei, der deutschen Telekom, Nokia
und anderen, auf dem Hafengebiet Hamburg bereits jetzt den 5G-Standard zu testen. In ganz
Europa soll der Standard ab dem Jahre 2020 eingeführt werden (Hamburg Port Authority, 2018).
2.4.6 Multi-Agent-System
Logistische und andere betriebliche Entscheidungen sind heute oft mit einer hohen Komplexität
verbunden. Zudem nimmt das allgemeine Planungsaufkommen zu. Dies hat zur Folge, dass der
10Prozess der Alternativenauswahl anhand manueller Vorgehensweise durch einen menschlichen
Agenten allein nicht mehr effizient genug umgesetzt werden kann. Folglich werden bei der
Entscheidungsfindung inzwischen vermehrt computergestützte Systeme herangezogen (Fischer,
2004). Der ursprünglichen Übersetzung aus dem Lateinischen nach, versteht man unter einem
Agenten einen „Handelnden“ (lateinisch: agens). Brenner et al. (1998) und Klusch (1999) haben
die Unterscheidung von Nissen (1995) zwischen Agenten und Softwareagenten aufgegriffen und
eine Aufgliederung in menschliche Agenten, Hardwareagenten und Softwareagenten vorgenom-
men (Fischer, 2004). Unter dem menschlichen Agenten versteht man also eine Person, die einen
Vergleich mehrerer Alternativen vorzunehmen hat. Als Hardwareagent wird eine kombinierte
Hard- und Softwareeinheit beschrieben, beispielsweise ein programmierbarer Industrieroboter.
Der Softwareagent hingegen ist ein Computerprogramm, das über wesentliche menschliche Ei-
genschaften verfügt, also eine Form künstlicher Intelligenz (Nissen, 1995). Um diese Intelligenz
nachzuweisen, müssen Agenten nach Wooldridge et al. (1995) über folgende Eigenschaften
verfügen:
• Reaktivität: Warnehmung der Umgebung und Reaktion auf diese
• Proaktivität: Ergreifen einer Initiative mit dem Zweck, ihre Ziele zu erreichen
• Sozialfähigkeit: Interaktion untereinander.
In einem Multi-Agent-System (MAS) tauschen sich mehrere Softwareagenten untereinander
aus, um verschiedenste Aufgabenstellungen zu lösen (Beckmann, 2013). Ein MAS weist, im
Vergleich zu traditionellen Computersystemen, die Besonderheit auf, dass Agenten hierbei
von unterschiedlichen Unternehmen stammen können und somit individuelle Ziele verfolgen
(Wooldridge, 2002).
113 Methodischer Zutritt
3.1 Übersicht und Vorgehensweise
Der ersten beiden Kapitel dieser Ausarbeitung boten eine Übersicht über das Thema und präsen-
tierten einige state-of-the-art-Technologien, die mittlerweile oft im Kontext digitaler Logistikver-
änderungen diskutiert werden. Die hohe Veränderungsrate und Entwicklungsgeschwindigkeit in
Hinsicht auf digitale Entwicklungen und technische Maßnahmen stehen der oftmals mehrjährigen
Umsetzung in konkrete Anwendungssysteme gegenüber. Somit existiert stets eine asynchrones
Verhältnis zwischen dem aktuellen Stand der Technik und dem, was im aktuellen Moment um-
gesetzt wurde beziehungsweise umsetzbar ist. Vereinfachend betrachtet verhält es sich wie mit
dem Kauf eines Elektronikgegenstandes bei Privatkonsumenten. Direkt nach dem Kauf besitzt
der Kunde bereits ein Produkt mit veralteter Technik, was freilich in der Natur technischer Dinge
liegt. Von daher können auch die in Kapitel 2 erwähnten Technologien bereits am morgigen
Tage veraltet sein. Auch bestehende Digitalisierungsmaßnahmen der im Folgenden behandel-
ten Seehäfen unterliegen dieser natürlichen Gegebenheit. Daher rührt auch die Tragweite der
gesamten Thematik, speziell aus Unternehmenssicht, da ein Großteil dieser Maßnahmen zwar in
den meisten Fällen erst in diesem Jahrzehnt eingeführt wurden, jedoch bereits ab Fertigstellung
das eben genannte Missverhältnis besteht. Die zumeist millionenschweren Investitionsprojekte
entstehen oftmals aus geschlossenen Kooperationen mit wenigen IT-Dienstleistern, aus denen in
sich geschlossene Plattformen hervorgehen. Dies wirft gleichzeitig die Frage nach der Modula-
rität und Erweiterbarkeit dieser Systeme für zukünftige Technologien auf. Mit dem Vorwissen
des aktuell theoretisch Möglichen ist ein Abgleich mit bestehenden neuartigen Hafensystemen
naheliegend. Dieser soll jeweils eine Auswahl aktueller Digitalisierungstechnologien interna-
tionaler Seehäfen aufzeigen. Die Methode gliedert sich also in die genannte Bestandsaufnahme
bestehender Digitalisierungsmaßnahmen und der Ergebnisdarstellung eines Workshops.
3.2 Workshop
Zur Generierung von Ergebnissen wurde ein studentischer Workshop im Rahmen des ITS-
Projektes durchgeführt. Die hierfür relevanten Kernkomponenten des Workshops bestanden aus
der kollaborativen Erstellung einer Cognitive Map sowie eines Brainstormings und einer Negativ-
konferenz, deren Ergebnisse daraufhin in eine SWOT-Analyse überführt wurden. Die Cognitive
Map diente der Identifikation und grafischen Darstellung der für die Hafenlogistik relevanten
Subsysteme und dem Aufzeigen etwaiger Digitalisierungspotenziale. Beim Brainstorming bzw.
der Negativkonferenz arbeiteten die Teilnehmer verschiedene positive und negative Aspekte
speziell der Hafendigitalisierung und der Digitalisierung im Allgemeinen heraus. Dabei betrach-
teten sie die relevanten Gesichtspunkte sowohl aus Unternehmensperspektive, als auch aus der
verschiedener Anspruchsgruppen. Bezugnehmend zur Forschungsfrage, inwiefern sich neuartige
Digitalisierungsmaßnahmen an deutschen Seehäfen umsetzen ließen, wurden die Ergebnisse zu-
letzt in eine SWOT-Analyse aus Sicht der betroffenen Hafenunternehmen am Wirtschaftsstandort
12Deutschland übertragen. Der Workshop diente in erster Linie dazu, eine Sicht aus naiver Perspek-
tive zu erfahren und einordnen zu können, da diese als Stichprobe betrachtet in gewisser Weise
die Auffassung der Allgemeinheit zur gesamten Digitalisierungsthematik widerspiegelt. Daher
lag die Zielsetzung nicht ausschließlich in der Erhebung qualitativer Daten, sondern in weiten
Teilen auch zur Validierung bereits gewonnener Erkenntnisse. Aufgrund der Aktualität, Schnell-
lebigkeit und Entwicklungsgeschwindigkeit digitaler Innovationen, speziell im Hinblick auf die
Anwendung in der Hafenlogistik, existiert vergleichsweise wenig wissenschaftliche Primärlitera-
tur. Der Großteil der verfügbaren Informationen zu aktuellen Digitalisierungsmaßnahmen wird
gängigerweise direkt von den jeweiligen Behörden und Dienstleistern im Internet zur Verfügung
gestellt. Besonderes Augenmerk liegt auch auf einer möglichst wertneutralen Darstellung der
Ergebnisse, da die diesbezügliche Diskussion in Kapitel 5 stattfindet. Im Folgenden werden die
genannten Methoden näher beleuchtet.
3.3 Erläuterung der Methoden
3.3.1 Cognitive Mapping
Im Bereich der Psychologie wird eine cognitive map nach Tolman (1948) als die interne men-
tale Repräsentation von Konzepten und deren Beziehungen untereinander eines Individuums
beschrieben. Diese wird dazu genutzt, die Umwelt besser zu verstehen und dementsprechende
Entscheidungen treffen zu können. Bei der Technik des cognitive mapping wird der Versuch
unternommen, subjektive Vorstellungen zunächst zu identifizieren, um diese daraufhin extern
darzustellen (Fiol und Huff, 1992). Dazu werden Individuen zu spezifischen Problemstellungen
befragt und ihre beschriebenen Konzepte und Beziehungen innerhalb einer grafischen Darstellung
angeordnet (Swan, 1997).
3.3.2 SWOT-Analyse
Die SWOT-Analyse ist ein unternehmensbezogenes Instrument zur langfristigen Strategiepla-
nung. Das Akronym SWOT setzt sich aus den englischen Begriffen strengths (Stärken), weak-
nesses (Schwächen), opportunities (Chancen) und threats (Gefahren) zusammen. Mittels einer
Vier-Felder-Matrix dient sie zur umfassenden Identifikation nachhaltiger Verbesserungsansätze,
der Marktpositionierung und einer gezielten Analyse der genannten Komponenten in Hinblick
auf eine geplante Unternehmensstrategie (Wildemann, 2018). Unterteilt wird die SWOT-Analyse
in eine interne sowie externe Analyse. Die externe Analyse behandelt die Umweltanalyse, wo
exogene Kräfte vorherrschen (Chancen und Gefahren), beispielsweise technologische, soziale,
politische oder ökologische Einflussfaktoren (MTEC-Akademie, 2018). Die interne Analyse ist
eine introspektive Betrachtung der Stärken und Schwächen des jeweiligen Unternehmens (CIO,
2018). Dazu gehören die finanzielle Situation des Unternehmens, Qualifikation und Fähigkeiten
der Mitarbeiter, aber auch die Unternehmenskultur (MTEC-Akademie, 2018).
134 Ergebnisse
4.1 Cognitive Map über die Subsysteme der Hafenlogistik
Abbildung 4 zeigt die Visualisierungsleistung der Workshopteilnehmer zur Identifizierung der
Subsysteme eines Containerterminals sowie weitere eigene Ergänzungen in Form einer Cognitive
Map. Sie gehen vom Mittelpunkt des Containerhafens aus und kennzeichnen als Kernkompo-
nenten die Subsysteme Transport, Umschlag, Lagerung, Informationsflüsse und Sicherheit und
Kontrolle.
Abbildung 4: Subsysteme eines Containerterminals (eigene Darstellung)
Während Transport, Umschlag und Lagerung ohnehin als die Kernprozesse der allgemeinen Lo-
gistik gelten (Pfohl, 2010), erachten die Teilnehmer die Informationsabwicklung und Sicherheit
eines Containerhafens als gleichermaßen relevant. Sie erlangten schnell die Erkenntnis, dass
die umfassende Vernetzung aller Kernkomponenten Vorteile und Prozessoptimierungen in allen
genannten Bereichen ermöglichen könne. Mit den aus den theoretischen Grundlagen vorgestellten
Informationstechnologien erörterten sie simplifizierte Vernetzungsmöglichkeiten und stellten die
These auf, dass die Informationsflüsse entlang der Hauptknoten derart eng miteinander verbunden
seien, dass ein effizienteres System zur Informationsübertragung hohe Kosten- und Zeiterspar-
nisse ermögliche. Angemerkt wurde ebenso, dass der Informationfluss nicht nur innerhalb des
geschlossenen Hafensystems stattfinde, sondern ein direktes Zusammenspiel zwischen allen be-
teiligten Akteuren des Logistikprozesses wie Auftraggeber, Reedereien oder Sicherheitsbehörden
darstelle. Unterschieden wurde speziell in den internen sowie externen Informationsfluss. Die
blauen Linien in Abbildung 4 repräsentieren die externen Informationsflüsse, die das System
14betreten und von da aus jeden weiteren Hauptknoten mit gegenseitigen Wechselwirkungen beein-
flussen, was durch die roten Verbindungslinien gekennzeichnet ist. Gleichzeitig signalisieren sie
jeweils die potenziellen Schnittstellen eines ubiquitären Informationsverteilungssystems. In die-
sem können zum Beispiel Ladeeinheiten mit einem RFID-Transponder zur Kennung ausgestattet
werden, die handelnden Gerätschaften mit den dazugehörigen Lesegeräten und diese zudem über
eine Anbindung zur unmittelbaren Übertragung an das übergeordnete drahtlose Hafennetzwerk in
Form eines Cyber-Physical-Systems (CPS) verfügen, auf das alle beteiligten Akteure zugreifen
können. Gerade die Gerätschaften des innerbetrieblichen Transports mit ihren individuellen
Standort- und Kapazitätsinformationen unterlägen der notwendigen Gewissheit, bei der Ankunft
von Ladungen zur rechten Zeit vor Ort zu sein, um den Auftrag weiterzuverarbeiten. Externe
Informationsflüsse wie Ankunftsdaten von Verkehrsträgern oder Aktivitäten externer Dienst-
leister auf dem Hafengelände müssten strikt mit der Planung der innerbetrieblichen Logistik
einhergehen. Im Zuge dessen werden im Folgenden reale Anwendungsfälle näher betrachtet.
4.2 Fallbeispiele der Hafendigitalisierung
Tabelle 2 vergleicht das Umschlagsvolumen der dargestellten Seehäfen für das Jahr 2017. Um
ein besseres Bild davon zu erlangen, wie die Seehäfen Digitalisierungsmaßnahmen einsetzen, um
jährlich diese enormen Umschlagsmengen effizient verarbeiten zu können, werden nun einige
konkrete Fallbeispiele aufgeführt.
Tabelle 2: Umschlagsvolumen Seehäfen 2017 (Lloyd’s List, 2018; Stadt Wilhelmshaven, 2018)
Hamburg Bremerhaven Wilhelmshaven Rotterdam Antwerpen Shanghai
TEU (2017) 8.860.000 5.510.000 554.449 13.734.334 10.450.897 40.233.000
Veränderung ggü. Vorjahr -0,56% -0,45% +15,10% +10,89% +4,12% +8,35%
4.2.1 Hyperkonvergente Infrastruktur
In der Informationsverarbeitung liegt bekanntermaßen eines der geeignetesten Anwendungsfelder
für Digitalisierungsmaßnahmen. Auffällig ist beim hochautomatisierten Hafen von Shanghai,
dass sie in diesem Bereich mit individualisierten Lösungen des US-amerikanischen Telekom-
munikationsunternehmens CISCO operieren (Cisco, 2018a). Dabei kommt eine sogenannte
Hyperkonvergente Infrastrukur (HCI) zum Einsatz. Die von Cisco bereitgestellte Lösung trägt
den Namen Cisco Hyperflex Multicloud Platform und besteht aus einem zentralen Manage-
mentsystem, das verschiedene Computing-, Netzwerk-, Storage- und Virtualisierungressourcen
vereint. Zuvor lag diesen Unterkomponenten meist eine eigene und von den anderen entkoppelte
Infrastruktur zugrunde, im HCI bilden sie einen zentral verwalteten Cluster. Cisco führt als
Vorteile unter anderem den geringen Bedarf an Speicherplatz, die Multi-Cloud-Unterstützung
sowie die flexible Skalierung der HCI auf. Letztere ist besonders für den Umfang komplexer lo-
gistischer Hafensysteme relevant und ermöglicht eine kürzere Adaption an sich schnell ändernde
Umfeldbedingungen (Cisco, 2018b).
154.2.2 Virtuelles Replikat und Ankunftsheuristiken des Hafens Rotterdam
Der Seehafen Rotterdam kooperiert derzeit mit den Unternehmen IBM, Cisco, Tele2 and Axians,
um das langfristige Ziel zu erreichen, dass Schiffe bereits im Jahre 2030 den Hafen vollständig
autonom betreten und verlassen können (Axians, 2018). Auf dem insgesamt 42 Kilometer langen
Hafengebiet, das vom Stadtgebiet Rotterdam bis zur eigentlichen Nordsee reicht, stattet IBM
das Areal mit Sensoren für ihre IoT und Cloud-Technologien aus. Primärziel ist die Erstellung
eines exakten digitalen Replikats der physischen Hafenaktivitäten, wobei eine hundertprozentige
Messgenauigkeit bezüglich der Verfolgung von Schiffsbewegungen, Infrastruktur, Wetterdaten,
geographischen Daten und Wassertiefe angestrebt wird (IBM, 2018). Mit einem zentralisierten
digitalen Dashboard soll es zukünftig möglich sein, die Operationen aller beteiligten Subjekte
in Echtzeit analysieren und betrachten zu können. In der Vergangenheit erfolgte die Kommu-
nikation mittels traditioneller Radio- und Radarkommunikation zwischen Kapitänen, Piloten
und der Terminalbelegschaft, um diesbezügliche Entscheidungen zu treffen (Port of Rotterdam,
2018a). Mittels augmented intelligence (AI) können die von den Sensoren erfassten Wetter- und
Wasserdaten akkurat den Zeitpunkt mit den bestmöglichen Konditionen für die Ankunft eines
Containerschiffs vorhersagen. Die Erhebung von Daten wie Lufttemperatur, Windgeschwindig-
keit und Richtung, Luftfeuchtigkeit und Wasserstromgeschwindigkeit (IBM, 2018) resultiere
nicht nur in einer sichereren Ankunft, sondern auch in einem niedrigeren Kraftstoffverbrauch.
Durch die Auswertung dieser Daten durch IBM’s Cloudplattformen kann die Hafenbehörde
wichtige Schlüsselentscheidungen zur Vermeidung von Wartezeiten, optimalen Anlegezeiten
oder Be- und Entladungszeiträumen leichter treffen und den verfügbaren Platz des gesamten
Areals effizienter nutzen.
4.2.3 Hyperloop-Projekt im Hamburger Hafen
Nach einer Pressemitteilung vom 05.12.2018 hat die Hamburger Hafen und Logistik AG (HHLA)
ein Joint-Venture mit dem US-amerikanischen Forschungs- und Entwicklungsunternehmen
Hyperloop Transportation Technologies (HTT) gegründet. Ziel dieser Unternehmung ist die
Realisierung der Idee, Container mit Hochgeschwindigkeit durch eine Röhre vom und zum
Hamburger Hafen zu befördern (HHLA, 2018a). Der Hyperloop ist ursprünglich eine Vision von
Elon Musk, CEO des US-amerikanischen Elektroautoherstellers Tesla, aus dem Jahr 2013. Es
handelt sich hierbei um ein Röhrensystem, in dem ein Vakuum erzeugt wird, wodurch es praktisch
weder Luftwiderstand noch Reibung gibt. Durch die Röhren sollen dann Transportkapseln mit
einer Geschwindigkeit von bis zu 1200 Kilometern pro Stunde befördert werden können (Spiegel
Online, 2018). Mit der Errichtung eines Hyperloop-Terminals im Hamburger Hafen und dem
Bau von Streckenverbindungen soll in Zukunft eine Hinterlandanbindung ins Umland ermöglicht
werden. Gemäß der Zielvorstellung von HHLA und HTT könnten hierbei etwa 4100 Container pro
Tag abgefertigt werden. Dadurch würden täglich tausende Lkw-Fahrten eingespart und die Abgas-
und Verkehrsbelastung somit verringert werden. Anfängliche Ziele sind die Entwicklung einer
Transportkapsel für den Gütertransport, der Bau einer Übergabestation und die Errichtung einer
16100 Meter langen Teststrecke. Diese könnte voraussichtlich am Containerterminal Altenwerder
entstehen, welches bereits hochautomatisiert betrieben wird. Mit einer erfolgreichen Umsetzung
des Konzepts sieht die Hamburger Hafengesellschaft zudem die Option, dieses weiterzuverkaufen
(Slavik, 2018).
4.2.4 Hamburg smartPORT
Schon seit Jahrhunderten ist der Hamburger Hafen überregionaler Handelsschwerpunkt und
insbesondere ab dem 14. Jahrhundert strategischer Knotenpunkt der Hanse (Handelskammer
Hamburg, 2018). Als fünfzehntgrößter Hafen der Welt und wichtiger Bestandteil der Nordrange
ist der Hamburger Hafen nicht nur ein lokal bedeutsamer Wirtschaftsfaktor. Nach den Häfen
Rotterdam und Antwerpen rangiert er auf dem dritten Platz der Häfen an der Nordrange, gemessen
an den umgeschlagenen TEU (siehe Tabelle 2). Anders als viele asiatische Tiefseehäfen ist der
Hamburger Hafen über Jahrzehnte hinweg gewachsen. Neue Technologien müssen also oft in
die bereits bestehende Infrastruktur integriert werden. Im Gegensatz zu beispielsweise Contai-
nerhäfen an der Mittelmeerküste sind die Nordrangehäfen hauptsächlich Tore ins Inland bzw.
Hinterland (Biermann und Wedemeier, 2016). Hinsichtlich der Prognose des weiteren Anstiegs
der weltweit transportierten und umgeschlagenen Container und einer Weiterentwicklung des
Geschäftsmodells heraus, wurde 2012 das Projekt smartPORT initiiert. Nicht nur Kostenopti-
mierung, sondern auch Punkte wie eine verbesserte Nachhaltigkeit werden durch strategische
Digitalisierungsmaßnahmen vorangetrieben (Saxe und Baumöl, 2018). Dabei wird großteils auf
Innovationen gesetzt, weniger auf das Integrieren von konventionellen, auf dem Markt etablier-
ten Technologien. Um die Komplexität möglichst gering zu halten, konzentriert sich Hamburg
insbesondere auf die digital vernetzte Logistik und den Bereich Energie (Fernuniversität Hagen,
2017).
Eine Vielzahl diverser Projekte stützen die Entwicklung zum intelligenten Hafen, mit dem
Hauptziel, die Gesamteffizienz stetig zu erhöhen. Um auch die Verbindung ins Hinterland intelli-
genter zu steuern, setzt Hamburg unter anderem auf die digital vernetzte Straße. Zum Einsatz
kommt dies aktuell bei der Verbindung über die Kattwykbrücke. Hier steht insbesondere die
rechtzeitige Wartung im Vordergrund, durch sensorbasierte Überwachung sollen mögliche Funkti-
onseinschränkungen erkannt werden, um die Logistikprozesse fortlaufend durchführen zu können.
Zur Datenerhebung werden Sensoren sowohl in die Straße eingelassen, z.B. zur Messung des
Verkehrsflusses, als auch Kameras und andere Sensoren eingesetzt (Schmid, 2016). Auch bei der
für die Hafenstruktur kritische Köhlbrandbrücke wird mit Hilfe klassischer Induktionsschleifen,
aber auch Technologien wie Bluetooth, die aktuelle Verkehrslage ermittelt und den Autos und
LKWs mittels Displays am Straßenrand mitgeteilt. Ziel ist eine Reduktion der Standzeiten und
dadurch bedingte Einsparungen an Emissionsausstößen (Cisco, 2012).
17Das Containerterminal Altenwerder (CTA) wird bereits durch ein von der HHLA entwickeltes
komplexes System gesteuert. An der maritimen Schnittstelle des Terminalsystems überneh-
men halbautomatische Containerbrücken das Löschen der Frachter. Das Zusammenspiel der
autonomen und teilautonomen Subsysteme überwacht und kontrolliert das Steuerungssystem
Terminal-Logistik und Steuerung (TLS). Um den schnellsten Weg im Terminal zu garantieren,
sind 19.000 Transponder ins AGV-System eingebaut, was nicht nur eine autonome Verteilung
von Containern ermöglicht, sondern auch die eigenständige Betankung steuert. Um den Hinter-
landtransport zu optimieren, initialisierte die HPA die Applikation smartPORT Logistics (SPL).
Spediteure, Hafenverwaltung und einzelne Frachtführer/-innen sind über die App vernetzt und
die Positionen der LKWs sind dem Disponenten zugänglich. Auf Basis dessen werden den
Fahrer/-innen Touren zugewiesen. Auch aktuelle Informationen über das Staugeschehen im
und um den Hafenbereich werden so direkt im LKW zur Verfügung gestellt (HHLA, 2018b).
Zielvorgabe der App war die Ermöglichung der just in time-Beladung an der Kaikante. Auch
die Baustellenkoordination zählt zu den zentralen Punkten, die durch die Applikation optimiert
werden. Durch eine Verbindung zum Leitstand der Hamburger Verkehrsbehörde können die
aktuellsten Daten in Echtzeit zum Betroffenen übermittelt werden (Fernuniversität Hagen, 2017).
4.3 SWOT-Analyse zur Einführung von Digitalisierungsmaßnahmen
Im angesprochenen Bezug zur Forschungsfrage stellen deutsche Seehäfen den Gegenstand der
SWOT-Analyse (siehe Tabelle 3) dar, die vor der langfristigen strategischen Entscheidung stehen,
Digitalisierungsmaßnahmen einzuführen. In der internen Analyse werden daher die Stärken und
Schwächen anhand der relevanten Merkmale des Standortes Deutschland betrachtet. In der
anschließenden externen Analyse werden die Chancen und Risiken unter Berücksichtigung des
Umfelds und der äußerlichen Einflussfaktoren ermittelt.
Tabelle 3: SWOT-Analyse zur Einführung von Digitalisierungsmaßnahmen
Stärken Schwächen
· Know-How · langwierige Bürokratie
· Gute Infrastruktur · Mindestlohn
· Politische Stabilität und Sicherheit · Viele unterschiedliche Interessengruppen
· Kompetente Partner · Hohe Konkurrenz
Chancen Gefahren
· Kostenreduzierung · Hohes Investitionsvolumen
· Höherer Informationsgehalt · Hohe Abhängigkeit von geschlossenen Systemen
· Schnellere Abläufe · Wegfall konventioneller Arbeitsplätze
· Höhere Effizienz · mögliche Imageschäden durch Arbeitsplatzabbau
· Betriebs- und Planungssicherheit · Festlegung auf Investitionsobjekte
· Reduzierung der Mitarbeiterbelastung · Minderung der Anpassungsfähigkeit
· Rechtliche Absicherung · Möglichkeit des Datenverlusts
· Schaffung neuer Arbeitsplätze
· Umweltschutz
· Vereinfachung von Zollabwicklungen
18Sie können auch lesen