Subjektive Sicherheit zur Steigerung der Akzeptanz des automatisierten und vernetzten Fahrens
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Forsch Ingenieurwes
https://doi.org/10.1007/s10010-021-00500-y
ORIGINALARBEITEN/ORIGINALS
Subjektive Sicherheit zur Steigerung der Akzeptanz des
automatisierten und vernetzten Fahrens
Uwe Drewitz1 · Marc Wilbrink1 · Michael Oehl1 · Meike Jipp1 · Klas Ihme1
Eingegangen: 2. November 2020 / Angenommen: 3. Juni 2021
© Der/die Autor(en) 2021
Zusammenfassung
Ein wichtiger Faktor für die Akzeptanz und damit die Verbreitung automatisierten und vernetzten Fahrens (AVF) ist der
Grad der subjektiven Unsicherheit (Ungewissheit), den Nutzende bei der Interaktion mit automatisierten Fahrzeugen emp-
finden. Subjektive Unsicherheiten treten immer dann auf, wenn Personen aufgrund fehlender Erfahrung oder fehlender
Informationen nicht in der Lage sind, den weiteren Verlauf einer Situation oder zukünftige Ereignisse vorherzusagen. Tre-
ten bei der Nutzung automatisierter Fahrzeuge solche Unsicherheiten auf, wird die Herausbildung von Vertrauen und damit
von Akzeptanz für diese Technologie durch die Unsicherheit begleitende negative Emotionen beeinträchtigt. Im Rahmen
des Projekts AutoAkzept (Automatisierung ohne Unsicherheit zur Erhöhung der Akzeptanz Automatisierten und Vernetzten
Fahrens) wurden Lösungen für nutzerfokussierte Automatisierung entwickelt, die Fahrzeuginsassen in den Mittelpunkt der
Systementwicklung stellen. Nutzerfokussierte Systeme berücksichtigen in der Mensch-Maschine-Interaktion zwei grundle-
gende menschliche Bedürfnisse, das Bedürfnis, zu verstehen (need to understand) und das Bedürfnis, verstanden zu werden
(need to be understood). Dazu setzen nutzerfokussierte Systeme verschiedene Sensoren ein, um subjektive Unsicherheiten
und ihre Einflussfaktoren in Echtzeit zu erkennen, diese Informationen mit Kontextdaten zu integrieren und Anpassun-
gen vorzunehmen, die subjektive Unsicherheiten reduzieren. Die systemischen Anpassungen nutzerfokussierter Systeme
folgen dabei einem ganzheitlichen Ansatz und berücksichtigen die Ebenen der Fahrzeugführung, der Interieuranpassung
und Informationsdarbietung sowie der Zielführung. Durch die Reduzierung oder Vermeidung subjektiver Unsicherheiten
unterstützen die Entwicklungen des Projekts eine positive, komfortable Benutzererfahrung und tragen zur Erhöhung der
Akzeptanz von AVF bei. Die Arbeit präsentiert hierzu Forschungsergebnisse von AutoAkzept zu den Themen Zustands-
und Aktivitätsmodellierung von Nutzenden sowie bedarfsgerechte Adaptionsstrategien, die einzelne Lösungsbausteine für
die Umsetzung nutzerfokussierter Automation bilden.
Availability of code: The code used for data processing and
analyses during the simulator study and the online study is
available from the corresponding author on reasonable request.
Availability of data and material: The final datasets analyzed
during the simulator study and the online study are available from
the corresponding author on reasonable request.
Uwe Drewitz
uwe.drewitz@dlr.de
1
Institut für Verkehrssystemtechnik, Deutsches
Zentrum für Luft- und Raumfahrt e. V. (DLR),
Lilienthalplatz 7, 38108 Braunschweig, Deutschland
K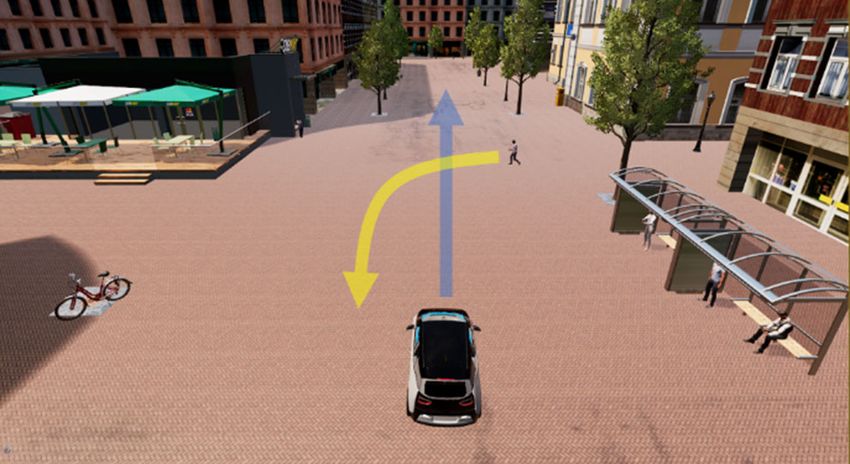
Forsch Ingenieurwes
Subjective certainty to increase the acceptance of automated and connected driving
Abstract
An important factor for the acceptance and thus the spread of automated and connected driving (ACD) is the degree of
subjective uncertainty that users experience when interacting with automated vehicles. Subjective uncertainties always
occur when people are not able to predict the further course of a situation or future events due to lack of experience or
information. If such uncertainties occur during the use of automated vehicles, the development of trust and thus acceptance
of this technology is impaired by the negative emotions accompanying subjective uncertainties. Within the AutoAkzept
project (which full title translates to: Automation without uncertainty to increase the acceptance of automated and connected
driving), solutions for user-focused automation have been developed that put vehicle occupants at the center of system
development. User-focused systems take into account two basic human needs in human-machine interaction, the need to
understand and the need to be understood. For this purpose, user-focused systems use different sensors to detect subjective
uncertainties and their influencing factors in real time, integrate this information with context data and make adjustments
that reduce subjective uncertainties. The systemic adaptations of user-focused systems follow a holistic approach that
includes the levels of vehicle guidance, interior adaptation and information presentation as well as target guidance are
included. By reducing or avoiding subjective uncertainties, the project developments contribute to a positive, comfortable
user experience and help to increase the acceptance of ACD. This paper presents research results of AutoAkzept on the
topics of user state and activity modelling as well as needs-based adaptation strategies, which represent key components
for the implementation of user-focused automation.
1 Akzeptanz des automatisierten und tem in Form tatsächlichen Nutzungsverhaltens. Die wahrge-
vernetzten Fahrens nommene Nützlichkeit und Einfachheit der Bedienung wer-
den wiederum durch verschiedene Eingangsvariablen mo-
Die Innovationen automatisierten und vernetzten Fahrens duliert, welche auf einer, der direkten Nutzung übergeord-
(AVF) führen zu einer Transformation des heutigen Stra- neten Ebene externe Faktoren wie soziale, berufliche oder
ßenverkehrs. Sie versprechen eine höhere Sicherheit und organisatorische Einflüsse und Erwartungen widerspiegeln
bezahlbare und bedarfsgerechte Mobilität mit Teilhabe für und damit selbst direkte Bestimmungsgrößen der Akzep-
alle, verbunden mit einem Gewinn an Komfort und nutzba- tanz darstellen. Im Rahmen der KE-Forschung werden da-
rer Zeit (z. B. [1]). Damit AVF diese Versprechen einlösen gegen Faktoren in den Mittelpunkt gestellt, die auf Ebene
kann, müssen nicht nur die technischen Herausforderungen des gemeinsamen zielgerichteten Zusammenwirkens von
von AVF bewältigt werden, sondern die entwickelten Sys- Menschen und Technik Einfluss auf die Überzeugungen
teme für AVF auch hohe Verbreitung finden. Dies kann nur und Wahrnehmungen der Nutzenden nehmen. Wesentlich
gelingen, wenn diese Systeme auf die Akzeptanz ihrer Nut- für die Herausbildung von Akzeptanz technischer Syste-
zenden stoßen [2] und zwar im Sinne zukünftiger, aktiver me ist demnach zum einen eine Kompatibilität von Tech-
entscheidungsbasierter Nutzung statt nur reaktiver Duldung nik, Aufgabenstellungen und Anwendungskontexten. Zum
(siehe [3]). anderen müssen Nutzende, darauf aufbauend, Überzeugun-
Die Frage, wann Menschen neue Technologien und tech- gen zu Eigenschaften der Technik und dem gemeinsamen
nische Systeme akzeptieren bzw. ablehnen, beschäftigt min- Zusammenwirken entwickeln, die wiederum zur Herausbil-
destens zwei verschiedene Forschungsrichtungen [4]. Zum dung von Vertrauen beitragen und schließlich zur Nutzung
einen die Forschung zu Informations- und Kommunika- führen [8].
tionstechnologien (IKT) und zum anderen die Forschung Auch wenn beide vorgestellten Ansätze wichtige Fak-
zu Kognitiver Ergonomie in der Systemgestaltung (KE). toren für die Herausbildung von Akzeptanz der Nutzenden
Aus dem Bereich IKT-Forschung stammt das prominentes- technischer Systeme benennen, zeigen sich Schwächen hin-
te Modell zur Technikakzeptanz, das Technology Accept- sichtlich der skizzierten Herausforderung: Ziefle kritisierte
ance Model (TAM) von Davies [5] und seine Erweiterungen z. B., dass die Modelle zur Technikakzeptanz vornehmlich
TAM2 und TAM3 von Venkatesh et al. [6, 7]. Die TAM- den Arbeitskontext adressieren und die Komplexität der in
Modelle postulieren zwei zentrale Faktoren für die Heraus- die Akzeptanzbewertung einfließenden Größen unterschät-
bildung von Akzeptanz, die wahrgenommene Nützlichkeit zen, weshalb sie nur unzureichend auf andere Anwendungs-
(perceived uselfulness) und die wahrgenommene Einfach- kontexte und Technikformen übertragbar sind [9]. Sie ver-
heit der Bedienung (perceived ease of use). Beide Fakto- wies in ihrer Kritik auch auf die Bedeutung der Perspektive
ren sind Determinanten für die Herausbildung einer Nut- von Nutzenden und ihren Rollen sowie damit verbunde-
zungsintention und beeinflussen die Akzeptanz für ein Sys- ner Kontrollerwartungen, die zu berücksichtigen sind. Gha-
K
Forsch Ingenieurwes
zizadeh et al. verwiesen auf Forschungsergebnisse, die im Fahrzeuge (mit den Automationsstufen SAE 4 oder 5, [21])
Widerspruch zu den Annahmen der KE-Modelle stehen [4]. nicht mit subjektiver Unsicherheit (Ungewissheit) und feh-
Denn obwohl hohe Leistungsfähigkeit technischer Syste- lendem Vertrauen verbunden ist [22].
me und Akzeptanz von Nutzenden in Übereinstimmung mit Subjektive Unsicherheiten treten immer dann auf, wenn
den KE-Modellen korrelierten (siehe [10]), zeigte sich, dass Menschen aufgrund fehlender Informationen keine Vorher-
Nutzende solche Systeme, die ihre Leistungen verbesser- sagen über den weiteren Verlauf einer Situation oder zu-
ten, in etlichen Fällen zugunsten von Systemen ablehnten, künftige Ereignisse machen können [23]. Jüngere Arbeiten
die weniger ausgeprägte Vorteile boten [11–13]. Dies zeigt, mit Bezug zu AVF bestätigen dies. Es zeigte sich, dass die
dass höhere Automatisierungsgrade trotz verbesserter Per- Geschwindigkeits- und Manöverwahl von Fahrzeugen bei
formanz nicht gleichermaßen von höherer Akzeptanz be- Personen Verstehens-, Antizipations- und Bewertungsunsi-
gleitet werden [14]. Die sich aus der tatsächlichen Nutzung cherheit auslösen können [24–26]. Zudem kann die Be-
ergebenden Einflüsse auf das Vertrauen und die Bewertung schäftigung mit fahrfremden Tätigkeiten, z. B. die Arbeit
von Systemen müssen entsprechend Berücksichtigung fin- im Mobile Office, Unsicherheiten darüber erzeugen, ob die
den. Huang und Haried schließlich kritisierten, dass die verfügbare Zeit bis zum Erreichen einer Systemgrenze aus-
auf dem TAM-Modell basierende IKT-Forschung zu Tech- reicht, notwendig zu bearbeitende Aufgaben fertigzustel-
nikakzeptanz nur eingeschränktes Erklärungsvermögen be- len. Dies kann dazu führen, dass sich das Versprechen zum
sitzt und das TAM wesentliche Faktoren der Akzeptanzbil- qualitativen Zeitgewinn durch die (zeitweise) Abgabe von
dung nicht berücksichtigt [15] (siehe auch [16]). Ihre Kritik Kontrolle an die Automation nicht einlöst, da durch die
richtet sich im Kern gegen ein rein rationales Verständnis vorhandene Unsicherheit hinsichtlich der Verfügbarkeit be-
von Akzeptanzbildung, dass davon ausgeht, dass Menschen nötigter Zeit für die unterbrechungsfreie Aufgabenbearbei-
eine Reihe kognitiver Prozesse durchlaufen und dabei lo- tung Stress und begleitend negative Emotionen ausgelöst
gische Entscheidungen treffen, ohne dass Emotionen oder werden.
das affektive Erleben bei der Nutzung technischer Systeme Das Erleben subjektiver Unsicherheiten und der sie be-
in irgendeiner Weise Beachtung finden. gleitenden Emotionen aber vermindert bzw. behindert die
Die Forschung und Entwicklung von AVF sollte diese Herausbildung von Akzeptanz seitens der Nutzenden, wel-
Erkenntnisse berücksichtigen und zur Gewährleistung von che maßgeblich durch Vertrauen und subjektive Sicherheit
Akzeptanz für die zu entwickelnden Systeme erstens den bestimmt wird, die Nutzende bei der Interaktion mit den
jeweiligen Anwendungskontext und die resultierende Pers- automatisierten Fahrzeugen empfinden [27–29]. Entschei-
pektive der Nutzenden und zweitens die Einflüsse, die mit dend ist hierbei, dass in die Herausbildung von Vertrauen
tatsächlicher Nutzung verbunden sind, d. h. das Erleben der zwar sowohl rationale Prozesse als auch affektives Erleben
Nutzenden und damit verbundene affektive Prozesse, wie involviert sind, vor allem aber das emotionale Erleben be-
das Erleben von Stress, auf die Akzeptanzbildung beach- stimmt, ob Nutzende Vertrauen entwickeln [30]. Oder, wie
ten. Tatsächlich können diese Aspekte zu einer einheitli- Lee und See es fassen: Nutzende denken nicht nur über Ver-
chen Perspektive der Förderung von Akzeptanz von AVF- trauen nach, sie fühlen es [8]. Der Stress und die negativen
Systemen integriert werden. Diese Perspektive wurde im Affekte, die das emotionale Erleben von Nutzenden beim
Projekt AutoAkzept [17, 18] verfolgt, dass sich mit subjek- Auftreten subjektiver Unsicherheiten begleiten, wirken sich
tiven Unsicherheiten von Nutzenden von AVF befasste. damit direkt negativ auf die Vertrauensbildung aus.
Die direkte Erfahrung mit AVF muss deshalb die Ausbil-
dung von Vertrauen unterstützen, indem das Auftreten von
2 Subjektive Unsicherheit und Vertrauen subjektiven Unsicherheiten minimiert wird. Dafür müssen
bei der Systemgestaltung für AVF grundlegende Bedürf-
AVF verändert die Rolle der Menschen beim Fahren. Hoch- nisse (needs) von Menschen berücksichtigt werden. Aktu-
und vollautomatisierte Funktionen von Fahrzeugen sollen elle Arbeiten verweisen darauf, wie wichtig z. B. die Be-
zukünftig alle Kontroll- und Überwachungsaufgaben über- rücksichtigung von Informationsbedürfnissen (information
nehmen, die bisher von Menschen ausgeführt werden. Der needs) von Nutzenden und verkehrlichen Interaktionspart-
daraus resultierende Verlust an Kontrolle kann bei den Nut- nern automatisierter Fahrzeuge ist [30–33]. Im Projekt Au-
zenden zukünftiger automatisierter Fahrzeuge jedoch Unge- toAkzept wurden deshalb die Bedürfnisse von AVF-Nut-
wissheit und subjektive Unsicherheit [19] auslösen und zu zenden in den Mittelpunkt gestellt und Lösungen zur Re-
einem Verlust an Vertrauen führen [20]. Insbesondere, wenn duktion subjektiver Unsicherheiten auf Basis nutzerfokus-
das Nutzungsversprechen die Möglichkeit zur vollständigen sierter Systeme entwickelt.
Hinwendung auf fahrfremde Tätigkeiten umfasst, kann sich
der versprochene Gewinn von AVF für zukünftige Nutzen-
de aber nur einstellen, wenn die Nutzung entsprechender
K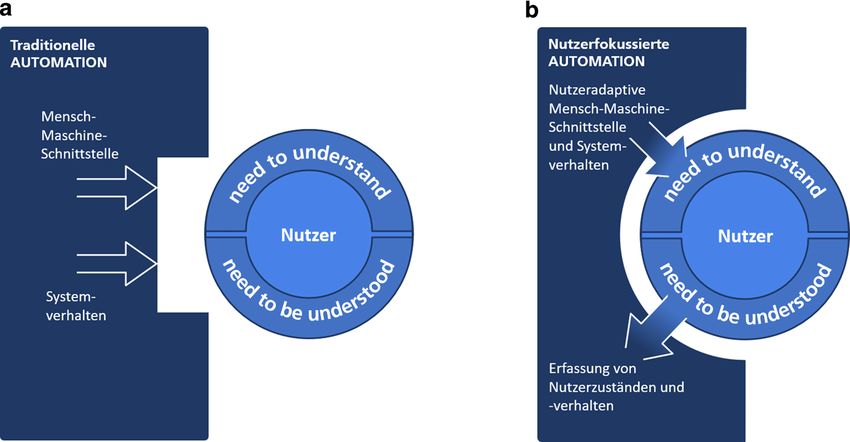
Forsch Ingenieurwes
3 Herausforderungen für die dererseits verdeutlicht. Der Ansatz nutzerfokussierter Au-
Systemgestaltung tomation stellt zwei grundlegende menschliche Bedürfnisse
in den Mittelpunkt der Systemgestaltung: das Bedürfnis, zu
Werden beim Entwurf und der Gestaltung automatisierter verstehen (need to understand, [35]) und das Bedürfnis, ver-
Systeme grundlegende Bedürfnisse von Menschen nicht be- standen zu werden (need to be understood, siehe [36, 37]).
rücksichtigt, besteht die Gefahr, dass die entwickelten Sys- Das Bedürfnis, zu verstehen (BZV), ist von zentraler Be-
teme intransparent erscheinen oder es tatsächlich sind. deutung für die erfolgreiche, zielgerichtete Interaktion mit
Die Folge ist, dass Personen, die mit solchen Systemen der Umgebung oder einem technischen System. Es ist eng
interagieren, die Gründe für das Verhalten einer Automa- verbunden mit den information needs (s. oben) und bildet
tion nicht nachvollziehen oder zukünftige Aktionen nicht die Grundlage für den Erwerb und die Anwendung von Wis-
vorhersagen können. Die Effekte eines solchen nachteili- sen, welches den Objekten und Phänomenen der Welt Be-
gen Gestaltungsansatzes werden häufig zusätzlich dadurch deutung verleiht. Es ermöglicht ein Verständnis über Din-
verstärkt, dass sich die Nutzenden in der Interaktion mit ge, Zusammenhänge und Wirkungsweisen und erlaubt die
dem technischen System an die maschinelle Kommunika- Vorhersage von Ereignissen. Um dem BZV Rechnung zu
tionsweise anpassen müssen. Diesen nachteiligen Aspekt tragen, muss die Gestaltung automatisierter Systeme sicher-
von Technik- und Systemgestaltung hat beispielsweise die stellen, dass die Technologien und technischen Funktionen
Ethik-Kommission „Automatisiertes und Vernetztes Fah- nicht nur tun, was sie zu tun versprechen, sondern auch,
ren“ kritisiert [34]. Derart gestaltete Systeme bergen das was die Nutzenden sich vorstellen. Automatisierte Systeme,
Risiko, dass Menschen bei der Techniknutzung subjektive die akzeptiert und bereitwillig genutzt werden sollen, müs-
Unsicherheiten erleben, verbunden mit den negativen Kon- sen sich deshalb vorhersagbar verhalten, auch dann, wenn
sequenzen für ihre Akzeptanz und Nutzungsintention. In sie zuvor noch nie genutzt wurden. Die Umsetzung die-
Abb. 1a ist die aus diesem Gestaltungsansatz resultierende ser Anforderung gewährleistet, dass automatisierte Syste-
Systemgestaltung, hier bezeichnet als traditionelle Auto- me für ihre Nutzenden transparent sind, und zwar so, dass
mation, dargestellt. Schematisch verdeutlicht wird die mit sie Funktionen und Funktionsweisen leicht ableiten können
diesem Ansatz verbundene geringe Passung zwischen Men- und mit geringstem Aufwand verstehen, wie ein System
schen (Nutzende) und Maschine (Automation) durch die funktioniert.
den Nutzenden nur unzureichend berücksichtigende Kom- Das Bedürfnis, verstanden zu werden (BVZW), ist hin-
munikations- bzw. Interaktionsgestaltung über die Mensch- gegen unerlässlich, um eine Beziehung aufzubauen. Es
Maschine-Schnittstelle bzw. das Systemverhalten. Um den muss Berücksichtigung finden, damit Menschen sich gut,
damit verbundenen negativen Konsequenzen vorzubeugen, gesehen und respektiert zu fühlen. Die Beachtung des
wurde im Rahmen von AutoAkzept der Ansatz einer nutzer- BVZW ist eine wichtige Grundlage für das Entstehen von
fokussierten Automation entwickelt. In Abb. 1b ist dieser Sympathie und Vertrauen, sowie für das Erleben positi-
Ansatz dem traditionellem Gestaltungsansatz gegenüberge- ver Affekte und die Abmilderung negativer Einflüsse. Für
stellt. Schematisch wird hier die Zielrichtung einer größe- die Gestaltung von automatisierten Systemen, wie hoch-
ren Passung zwischen Menschen (Nutzende) einerseits und und vollautomatische Fahrzeuge, hat dies zur Konsequenz,
der Gestaltung automatisierter Systeme (Automation) an- dass sie z. B. erkennen sollten, ob ihre Nutzenden unsicher
Abb. 1 Systemgestaltung oh-
ne (a) und mit (b) Bezug zu
zwei zentralen Nutzerbedürfnis-
sen. Adaptiert nach [17, 18]
KForsch Ingenieurwes
oder gestresst sind und entsprechend darauf reagieren. Vo- tuellen Ausprägungen zu erfassen und in der Interaktion zu
raussetzung für solche spezifischen, auf den individuellen berücksichtigen.
Nutzenden gerichteten Reaktionen ist jedoch, dass die Sys-
teme erkennen, wann es angebracht ist, z. B. zusätzliche
Informationen bereitzustellen und wann nicht. Zu diesem 4 Lösungsbausteine
Zweck ist es wichtig, die Nutzenden zu fokussieren und in
der Lage zu sein, die unterschiedliche Natur verschiedener Im Folgenden werden zwei prototypische Lösungsbausteine
menschlicher Zustände sowie daraus folgende Bedürfnisse vorgestellt, die im Projekt AutoAkzept entwickelt wurden
zu berücksichtigen. In Abb. 1b sind diese Aspekte durch und einen Beitrag zur Entwicklung nutzerfokussierter au-
einen Wirkkreis aus Erfassung von Zuständen der Nut- tomatisierter Systeme darstellen. Durch die Covid-19-Pan-
zenden, und Anpassung der Mensch-Maschine-Interaktion demie und die damit verbundenen Sicherheitsmaßnahmen
bzw. des Systemverhaltens an die Nutzenden dargestellt. kam es zu Einschränkungen für die zwingend auf Studien
Die Erfassung der Zustände von Nutzenden ist hierbei die mit Teilnehmenden angewiesene Projektarbeit in AutoAk-
Voraussetzung für die Berücksichtigung des BVZW. Die zept. Dadurch konnten nicht alle Arbeiten zur Projektlauf-
Möglichkeit zur Anpassung der Mensch-Maschine-Inter- zeit finalisiert und integriert werden. Es werden daher zwei
aktion ist die Voraussetzung dafür, dem BZV gerecht zu unabhängige Arbeiten zu zwei verschiedenen Anwendungs-
werden. Seine Wirksamkeit entfaltet der Gestaltungsansatz, fällen hochautomatisierten Fahrens (SAE 4) vorgestellt. Die
wie in Abb. 1 dargestellt, also nur durch das Zusam- Erarbeitung der vorgestellten Lösungsbausteine erfolgte so-
menspiel beider Bausteine. Zusammengefasst gilt, dass mit jeweils im Rahmen nur eines ausgewählten Anwen-
nutzerfokussierte Systeme sich dadurch auszeichnen, dass dungsfalls. Die in den folgenden Abschnitten dargestell-
sie die Nutzenden in ihrem Verhalten erfassen und durch ten Ergebnisse dienen deshalb in erster Linie dazu, Wege
Anpassungen reagieren und somit auf die individuellen für die Entwicklung von Lösungsbausteinen zu skizzieren,
Bedürfnisse von Nutzenden eingehen. Dadurch wird das die die Bedürfnisse von Nutzenden automatisierter Syste-
Vertrauen von Nutzenden in die technischen, insbesondere me, das Bedürfnis, verstanden zu werden (BVZW) und das
die hoch- und vollautomatisierten Systeme (SAE 4 und 5) Bedürfnis, zu verstehen (BZW), berücksichtigen. Die Er-
gestärkt. Ihre Akzeptanz steigt. gebnisse zeigen exemplarisch, wie die Systemgestaltung
Der Entwurf nutzerfokussierter Systeme unterscheidet nutzerfokussierter Systeme zur Sicherung der Akzeptanz
sich von anderen theoretischen Ansätzen durch die explizite neuer Fahrzeugsysteme im Anwendungsbereich automati-
Betonung, Beschreibung und Fokussierung zu berücksichti- sierten und vernetzten Fahrens mit der Automatisierungs-
gender Bedürfnisse von Nutzenden. Während die Informati- stufe SAE 4 beitragen kann. Gemeinsam ist den Arbeiten,
onsbedürfnisse der Nutzenden von AVF zwar bereits in der dass sie sich mit dem im Projekt AutoAkzept adressierten
Literatur diskutiert werden (s. Beispiele oben), finden sich Nutzerzustand der subjektiven Unsicherheit befassen. Zu-
bisher keine Arbeiten zum hier beschriebenen BVZW o. ä. erst wird dazu eine Simulatorstudie (Studie 1) vorgestellt,
In der Forschung zu Akzeptanz und Vertrauen adressieren die das BVZW in den Mittelpunkt stellt. Die Studie liefert
zu wenige Arbeiten die Erlebensebene. Zahlreiche aktuel- Ergebnisse für den ersten Lösungsbaustein, die prototypi-
le Projekte und damit verbundene Arbeiten im Bereich der sche Umsetzung einer kontextsensitiven Zustandserfassung
Forschung zum automatisierten Fahren widmen sich zwar von Nutzenden am Beispiel des Anwendungsfalls Arbei-
der Erfassung von Fahrern, insbesondere zur sicheren Ge- ten im Mobile Office. Anschließend wird eine Online-Stu-
staltung von Prozessen der Übergabe der Fahrzeugkontrolle die (Studie 2) vorgestellt, die sich dem BZV widmet. Sie
z. B. für SAE 3 Anwendungsszenarien [38–40], oder einer liefert Ergebnisse zur Gestaltung einer prototypisch umge-
komfortablen Gestaltung der Aufgabenverteilung beim Zu- setzten Mensch-Maschine-Interaktion zur Unsicherheitsre-
sammenwirken von Fahrer und Fahrzeug [41]. Die expli- duktion für den Anwendungsfall Fahrt im Shared Space.
zite Zielstellung der Verbesserung des affektiven Erlebens Obwohl beide Lösungsbausteine der Arbeit zu verschie-
von Menschen bei der Nutzung von automatisierten Sys- denen Anwendungsfällen im Projekt entstammen, werden
temen, zur Gewährleistung von Akzeptanz und Vertrauen, sie hier gemeinsam präsentiert, um Möglichkeiten für die
durch Berücksichtigung grundlegender Bedürfnisse auf in- technische und gestalterische Umsetzung nutzerfokussierter
dividueller Ebene, wie dem BVZW, wird dagegen in der Systeme zu demonstrieren. Das Konzept nutzerfokussierter
Forschung bisher kaum adressiert. Die aktuelle Diskussion Systeme bildet hierbei das verbindende Element, dass die
zu den Herausforderungen der Gestaltung der Interaktion erfolgten Forschungs- und Entwicklungsarbeiten in einen
von Menschen und intelligenten Systemen zeigt jedoch, die gemeinsamen Rahmen stellt.
Notwendigkeit solche Systeme auch im Sinne menschlicher
Wertvorstellungen zu gestalten [42]. Dazu zählt, wesentli-
che Bedürfnisse von Menschen in ihren individuellen, ak-
KForsch Ingenieurwes
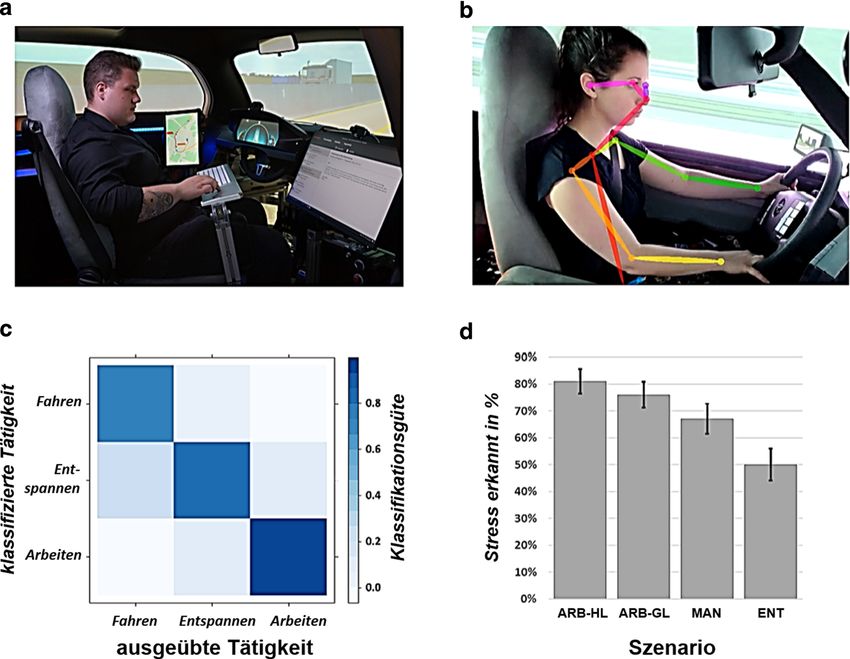
Abb. 2 Kontextsensitive Erfas-
sung von Stress. a Bürotätigkeit
im AF (SAE 4). b OpenPose-
Overlay als Grundlage für die
Aktivitätserkennung. c Konfu-
sionsmatrix mit Klassifikations-
güte der Aktivitätserkennung.
d Erkannter Stress in den Sze-
narien. Abkürzungen: ARB-
HL Arbeiten mit hoher Last,
ARB-GL Arbeiten mit geringer
Last, MAN Manuelles Fahren,
ENT Entspannen. Fehlerbalken
zeigen den Standardfehler
4.1 Kontextsensitive Zustandserfassung von über einen Autobahnpilot und kann somit Autobahnfahr-
Nutzenden ten automatisiert, ohne notwendige Eingriffe der Fahrer
bewältigen. Nach Abfahrt von der Autobahn müssen die
Die kontextbasierte Erfassung der Zustände von Nutzen- Nutzenden die Kontrolle übernehmen und manuell im ur-
den wurde in einem Demonstrator im Fahrsimulator Virtu- banen oder ländlichen Raum fahren. Durch diese Situati-
al Reality Lab [43] erforscht. Das auf dem Urban Modu- on der notwendigen Kontrollübergabe an der Systemgrenze
lar Vehicle [44] basierende MockUp, welches zum Einsatz kann für Nutzende, welche zuvor Arbeitstätigkeiten, etwa
kam, repräsentiert ein automatisiertes Fahrzeug (AF) mit das Fertigstellen einer wichtigen Kundenpräsentation oder
der Automationsstufe SAE 4 [21]. Im Projekt wurde ein die Beantwortung dringender Emails, durchführen, subjek-
Setup erarbeitet, dass die Möglichkeit zum mobilen Arbei- tive Unsicherheit darüber entstehen, ob die schlecht zu un-
ten bietet (siehe [45], Abb. 2a). Es stützt sich auf ein ein-/ terbrechende Aufgabe noch rechtzeitig fertiggestellt wer-
ausfahrbares Lenkrad, einen zur Seite drehbaren Fahrersitz, den kann. Diese Unsicherheit übt einen Zeitdruck aus, der
eine klappbare Tastatur sowie einen festinstallierten Mo- durch den Nutzenden als Stressor empfunden werden kann
nitor. Den Nutzenden des Fahrzeugs bietet sich dadurch und somit Stress auslöst [47]. Stress wird hier definiert als
die Möglichkeit, die Zeit während einer vollautomatisier- eine Situation, in der ein Individuum die Anforderungen
ten Fahrt z. B. für die computergestützte Bearbeitung an- durch die Umwelt so bewertet, dass sie seine eigenen An-
spruchsvoller Aufgaben zu nutzen. Zur Umsetzung des ein- passungsfähigkeiten übersteigen [48]. Da Stress zu einer
geführten Konzeptes einer nutzerfokussierten Automation verstärkten Aktivierung des sympathischen Nervensystems
(siehe Abb. 1) verfügt das Fahrzeuginterieur über Kameras und damit zu einer Erhöhung des physiologischen Erre-
zur Aufnahme des Oberkörpers sowie über in den Sitz inte- gungslevel führt, eignen sich kardiovaskuläre Indikatoren
grierte kapazitive Elektroden zur Aufzeichnung von Herz- wie Herzrate und Herzratenvariabilität zur Erfassung von
rate und Herzratenvariabilität über ein Elektrokardiogramm Stress (z. B. [49, 50]). Diese Maße haben darüber hinaus
[46]. Gestützt auf diese sensortechnische Ausstattung kön- den Vorteil, dass ihre Erfassung durch im Sitz verbaute
nen mit dem Demonstrator automationsbezogene affektive Sensoren möglich ist, ohne dabei den Nutzenden bei der
Zustände von Nutzenden, wie Unsicherheit oder Stress und Bearbeitung von Aufgaben zu stören oder zu beeinträch-
deren kontextsensitive Erfassung, untersucht werden. tigen [46]. Ein nutzerfokussiertes System sollte entstehen-
Im Anwendungsfall Arbeiten im Mobile Office, welcher den Stress von Nutzenden erkennen und Informationen be-
mit dem Demonstrator adressiert wurde, verfügt das AF reitstellen oder Anpassungen anbieten, die das BVZW der
KForsch Ingenieurwes
Nutzenden befriedigen. Die Automation könnte, wenn die ten, so dass hier eine Situation geschaffen wurde, die bei
Randbedingungen es zulassen, z. B. eine Routenanpassung allen Versuchsteilnehmenden Stresserleben auslösen sollte1.
anbieten, die die Kontrollübergabe zeitlich nach hinten ver- Während der Fahrten wurde ein EKG abgeleitet – hier kam
schiebt und gleichzeitig durch lichttechnische Anpassun- für die Studie noch ein mobiles System der Marke Health-
gen im Interieur das fokussierte Arbeiten unterstützen. Um Lab zum Einsatz – sowie Oberkörper und Kopf der Ver-
solch ein nutzerfokussiertes Systemverhalten zu ermögli- suchsteilnehmenden per Kamera von der rechten A-Säule
chen, wird eine kontextsensitive Erfassung des Zustands aus aufgezeichnet. Aus dem EKG wurde zu jedem Herz-
von Nutzenden benötigt. Folglich diente diese Studie der schlag die Zeit zum vorherigen Herzschlag (Interbeatinter-
Entwicklung von echtzeitfähigen Methoden zur Erfassung vall, IBI) als Indikator für die aktuelle Herzrate der Ver-
von Stress und der Aktivität von Nutzenden von AFs. Die suchsteilnehmenden berechnet. Um Informationen über die
Aktivität bildet hierbei den kontextuellen Rahmen, in dem Körperhaltung zu erlangen, erfolgte eine Extraktion der Po-
der Stress erlebt wird. Die Integration beider Erfassungsme- sitionen relevanter Körperpunkte aus den Videodaten mit-
thoden zu einer kontextsensitiven Zustandserfassung bildet tels OpenPose [52] in Echtzeit (siehe Abb. 2b).
eine Grundlage für die Entwicklung nutzerfokussierte Au-
tomation und richtet sich auf das BVZW von Nutzenden. 4.1.2 Ergebnisse
4.1.1 Studie 1: Arbeiten im Mobile Office Das IBI und die Lokationen der Körperpunkte dienten als
Input zur Entwicklung der kontextsensitiven Erfassung des
Für die Entwicklung einer auf maschinelle Lernverfahren Stresslevels der Nutzenden auf Basis maschineller Lernver-
gestützten Methode zur kontextsensitiven Erfassung des ak- fahren. Hierfür wurden aus den IBI-Daten jeweils für über-
tuellen Stresslevels von Nutzenden von AFs für den darge- lappende Zeitfenster von 30 s (29 s Überlappung) die mitt-
stellten Anwendungsfall (siehe [51]) wurde im Projekt Au- lere Herzrate sowie die RMSSD („root mean squared dif-
toAkzept eine Simulatorstudie durchgeführt. Der dabei er- ference of sukzessive heart beats“, siehe [53]) als Indika-
hobene Datensatz umfasst die Daten von insgesamt 32 Ver- tor für die Herzratenvariabilität berechnet. Anschließend er-
suchsteilnehmenden (18 Frauen, 14 Männer). Das mittlere folgte datengetrieben mittels eines Clusterings über Gauß-
Alter der Stichprobe lag bei 25 Jahren (SD = 7,6), wobei sche Mischmodelle eine Abschätzung des aktuellen Erre-
der/die jüngste Teilnehmende 18 und der/die älteste Teil- gungslevels der jeweiligen Versuchsteilnehmenden. Parallel
nehmende 62 Jahre alt war. Die Versuchsteilnehmenden er- dazu erfolgte auf Grundlage ausgewählter Körperpunktpo-
lebten im Demonstrator verschiedene Szenarien: Das erste sitionen der Hände und des Kopfes eine Bestimmung der
Szenario beinhaltete eine manuelle Fahrt (MAN) auf einer der aktuellen Haltung (Körperpose) und darauf aufbauend
Autobahn. In drei weiteren Szenarien fuhr das Fahrzeug au- die Klassifikation der Tätigkeit über einen Support Vector
tomatisiert und die Versuchsteilnehmenden mussten entwe- Classifier (SVC). Dabei wurde die Annahme zu Grunde
der eine Bürotätigkeit (Abarbeiten von E-Mails im E-Mail- gelegt, dass die Szenarien MAN, ENT und ARB-HL je-
Client, Abb. 2a) mit zwei verschiedenen Arbeitslastniveaus weils vollständig die Tätigkeiten Fahren, Entspannen und
(geringe Last, ARB-GL, oder hohe Last, ARB-HL) erledi- Arbeiten enthalten. Für das Szenario ARB-GL wurde an-
gen oder konnten sich entspannen (ENT). Jede Fahrt dauer- genommen, dass es sowohl die Tätigkeit Arbeiten als auch
te etwa 15 min. In den automatisierten Fahrten erhielten die Entspannen enthält, in Abhängigkeit davon, wie die Ver-
Versuchsteilnehmenden die Instruktion, dass sie nach Ab- suchsteilnehmenden sich die Aufgabenbearbeitung einteil-
lauf dieser Zeit wieder die Kontrolle übernehmen müssen ten. Deshalb erfolgte das Training des SVC mit den Daten
und folglich bis dahin alle E-Mails im Postfach bearbeitet der ersten drei Szenarien, so dass jedes Szenario selbst je-
sein sollten. Somit sollte durch die variierende Aufgaben- weils eine Tätigkeit repräsentierte und ARB-GL nicht für
last, kombiniert mit der drohenden Übernahme, Zeitdruck das Training des SVC genutzt wurde. Die Klassifikations-
und damit Stress bei den Versuchsteilnehmenden induziert güte des SVC für die drei Tätigkeiten ist in der Konfusions-
werden. ENT sollte dabei keinen Stress erzeugen. Die Auf- matrix in Abb. 2c dargestellt. Die Ergebnisse zeigen, dass
gaben ARB-GL und ARB-HL waren so gestaltet, dass sie die Erkennung der ausgewählten Aktivitäten über den pro-
bei den Versuchsteilnehmenden verschiedene Stresslevel in- totypisch implementierten Ansatz insgesamt sehr vielver-
duzieren sollten. Während ARB-GL erforderte das Beant- sprechend ist, mit einer Klassifikationsgüte (Anteil korrek-
worten aller E-Mails zwar ein kontinuierliches Bearbeiten
der Aufgabe; die Häufigkeit der Mails war aber so ge- 1 Es ist möglich, dass die gewählten Aufgaben vermutlich nicht bei al-
wählt, dass die Aufgabenanforderung die Fähigkeiten der len Versuchsteilnehmenden das gleiche Stresslevel erzeugt haben, da
Stress von den eigenen erlebten Anpassungsfähigkeiten abhängt (vgl.
Versuchsteilnehmenden nicht übersteigen sollte. ARB-HL
[48]). Somit könnte eine Optimierung der Aufgabe mit einer Anpas-
wurde hingegen so ausgelegt, dass die vorgegebene Zeit sung an die persönlichen Fähigkeiten der Versuchsteilnehmenden zu
grundsätzlich nicht ausreichte um alle E-Mails zu bearbei- einer verbesserten Induktion von Stress führen.
KForsch Ingenieurwes
ten Klassifikationen einer Tätigkeit) für Fahren von 0,75, zielt positiv zu beeinflussen bzw. sie gezielt in ihrem Han-
für Entspannen von 0,84 und für Arbeiten von 0,93. Her- deln zu unterstützen. Dafür ist es notwendig Informationen
ausforderungen für die Erkennung entstehen hierbei z. B. zum Zustand von Nutzenden mit Informationen zum Kon-
dadurch, dass viele Versuchsteilnehmende in den Szenarien text zu integrieren. Denn Nutzende, deren Stresserleben aus
MAN und ENT für die ausgewählten Körperpunkte ver- der Arbeit im Mobile Office herrührt, haben einen anderen
gleichbare Positionen wählten (vgl. [51]). Eine Hinzunah- Unterstützungsbedarf als jene, deren Stress beim bzw. durch
me weiter Körperpunkte und Änderungen im Fahrzeugsetup das Fahren entsteht. D. h. nur solche systemischen Anpas-
wie flexibel anpassbare Sitzeinstellungen (z. B. für Entspan- sungen, die eine hohe Passung mit dem aktuellen Zustand
nen) können hier zu einer besseren Klassifikationsleistung und Kontext von Nutzenden aufweisen, befriedigen ihre in-
beitragen. dividuellen Bedarfe und damit ihr BVZW. Für die Tätig-
Basierend auf den Werten für Erregung und Haltung wur- keit im Mobile Office etwa, könnte eine Anpassung der Be-
de, jeweils in Fenstern von 60 s, bestimmt, wie hoch die leuchtung unter Nutzung moderner Lichttechnik helfen, um
Wahrscheinlichkeit ist, dass die Nutzenden gestresst sind die Konzentration zu fördern [39] und damit das fokussierte
(siehe Abb. 2d) bzw. welche Aktivität sie gerade durch- Arbeiten zu erleichtern. Die aktuelle Aktivität der Nutzen-
führen. Dies erfolgte durch eine Bestimmung der relativen den ist jedoch nur ein relevanter Kontextfaktor. Informa-
Häufigkeit der bestimmten Erregung bzw. der einzelnen Po- tionen über die Umgebung, die Verkehrssituation oder die
sen in dem jeweiligen Zeitfenster. Die Wahrscheinlichkeit aktuell gefahrene Route und mögliche Alternativen können
für Stress errechnet sich folglich daraus, wie oft der Klas- das Verständnis über die Ursache(n) des aktuellen Zustands
sifikator in der letzten Minute ein hohes Erregungslevel er- der Nutzenden von AFs weiter verbessern und so zu ihrer
kannt hat. Im aktuellen Ansatz wurde der Grenzwert so Unterstützung und Verbesserung ihres Erlebens beitragen
gewählt, dass Stress angenommen wird, wenn in mehr als [18].
50 % der vergangenen Minute ein hohes Erregungsniveau
vorhanden ist. Mit dem gewählten Ansatz wurde über alle 4.2 Unsicherheitsreduktion über das internale HMI
Versuchsteilnehmenden erwartungskonform am häufigsten
im Szenario ARB-HL Stress erkannt (81 % der Zeit), ge- Im Rahmen einer Online-Studie wurden in AutoAkzept für
folgt von ARB-GL (76 %), MAN (67 %) und ENT (50 %). den Anwendungsfall Fahrt im Shared Space Gestaltungs-
Eine Erklärung für die relativ hohen Werte für ENT und maßnahmen zur Reduktion subjektiver Unsicherheiten un-
MAN bietet das experimentellen Setting, bei dem die Ver- tersucht. Für die Reduktion der subjektiven Unsicherheit ist
suchsteilnehmenden unter Beobachtung stehen und in ei- es von entscheidender Bedeutung, den Nutzenden eines au-
nem kurzen Zeitraum einer Vielzahl unbekannte neuer Rei- tomatisierten Systems das aktuelle und zukünftige Verhal-
ze und Eindrücke ausgesetzt sind. ten der Automation möglichst transparent, effizient und ef-
Hierbei ist anzumerken, dass Stress eigentlich als Kon- fektiv zu kommunizieren. Hierbei soll eine leicht verständli-
tinuum aufgefasst wird und somit die hier verwendete Dis- che und eindeutig gestaltete Mensch-Maschine-Interaktion
kretisierung (in Stress vorhanden oder nicht) in Frage ge- (MMI) die nötige Unterstützung von Nutzenden eines AFs,
stellt werden kann. Letztlich würde das hier gewählte Mo- mit Hilfe einer informationsvermittelnden, im Fahrzeug in-
dell zur Bestimmung von Stress auf Basis des subjekti- tegrierten, d. h. internalen Mensch-Maschine-Schnittstelle
ven Erregungslevels auch erlauben einen kontinuierlichen (internal human-machine interface, iHMI), gewährleisten.
Stresswert auszugeben. Es sollte daher jeweils für den kon- Durch eine kontinuierliche Erfassung des Zustands und Ver-
kreten Anwendungsfall geschaut werden, welche Ausgabe haltens von Nutzenden soll jederzeit eine Anpassung der
dem Anwendungszweck dient. Eine vollständige Darstel- MMI an die Bedürfnisse der Nutzenden möglich sein. Ziel
lung der Details zum Aufbau und der Leistungsfähigkeit ist es, durch ein adaptives iHMI die individuellen Infor-
des vorgestellten Ansatzes bietet [51]. mationsbedürfnisse der Nutzenden optimal adressieren zu
Durch die Abschätzungen für das aktuelle Stresslevel können und dadurch ihrem BZV gerecht zu werden. Da-
sowie die aktuelle Aktivität können nun nicht nur Aussa- zu soll bei Auftreten einer subjektiven Unsicherheit von
gen darüber getroffen werden, ob die Nutzenden aktuell ein Nutzenden eine sofortige subjektive Sicherheitssteigerung
hohes Stresslevel haben, sondern auch, aus welcher Ak- mittels intelligenter Anpassung des MMI über das iHMI er-
tivität detektierter Stress wahrscheinlich resultiert. Damit möglicht werden. Dies ist besonders während der automa-
wird es möglich das BVZW der Nutzenden zu berücksich- tisierten Fahrt von Bedeutung, da die Nutzenden von AFs
tigen und diesem Bedürfnis durch Anpassungen des Sys- die Fahrzeugführung an die Automation abgeben und die
temverhaltens gezielt gerecht zu werden. Das bedeutet, dass Rolle eines Fahrgastes übernehmen. Dieser Rollenwechsel
auf Grundlage der kontextsensitiven Zustandserfassung den bedingt ebenfalls eine Anpassung der MMI. Die Nutzen-
Nutzenden Interventionsstrategien zur Unterstützung ange- den müssen sich in der neuen Rolle als Fahrgast verstanden
boten werden können, die es ermöglichen ihr Erleben ge- fühlen und benötigen nun andere Informationen, damit ihr
KForsch Ingenieurwes
BZV befriedigt wird und sie sich während der Fahrt sicher re Alter der Stichprobe lag bei 34,16 Jahren (SD = 12,54),
fühlen [54]. Adaptive iHMI-Lösungen bilden daher einen wobei der/die jüngste Teilnehmende 18 und der/die älteste
weiteren Baustein für die Entwicklung nutzerfokussierter Teilnehmende 69 Jahre alt war. Da bei hochautomatisierten
Automation, der in diesem Rahmen auf das BZV der Nut- Fahrzeugen (SAE 4) der Mensch nicht mehr als Rückfall-
zenden gerichtet ist. ebene fungieren muss, wenn die Automation an ihre Gren-
Um die subjektive Unsicherheit der Nutzenden in einem zen gerät, konnten sich auch Erwachsene ohne Führerschein
AF möglichst gering zu halten bzw. in komplexen Verkehrs- und geringer jährlicher Fahrpraxis an der Studie beteiligen.
situationen zu reduzieren, wurde in der aktuellen Studie Bis auf drei Versuchsteilnehmende waren alle Studienteil-
auf ein bereits in einem anderen Nutzungskontext erprob- nehmende im Besitz einer gültigen Fahrerlaubnis und fuh-
tes iHMI-Konzept [55] zurückgegriffen. Hierbei wird mit ren im Mittel 8949 km (SD = 8809) pro Jahr. Alle Versuchs-
Hilfe eines im Fahrzeuginnenraum verbauten 360°-LED- teilnehmende gaben an, bereits von automatisierten Fahr-
Lichtbandes eine MMI mithilfe von richtungsaufgelösten zeugen gehört zu haben. Darüber hinaus interessieren sich
Lichtsignalen realisiert. Diese MMI-Lösung wurde sowohl 70 % der Versuchsteilnehmenden stark bis sehr stark für das
für die Fahrerunterstützung während manueller Autobahn- Thema automatisiertes Fahren. Um die Technikaffinität der
fahrten ohne Automationseingriffe (SAE 0), als auch in hö- Stichprobe einschätzen zu können, wurde ein Fragebogen
heren Automationsstufen evaluiert [56]. Besonders in den zur interaktionsbezogenen Technikaffinität (ATI) [58] als
höheren Automationsstufen (> SAE 2) soll den Fahrenden Messmethode verwendet. Der Fragebogen erfasst die In-
mittels intelligenter Systemrückmeldung des iHMI verdeut- teraktion mit technischen Systemen auf einer sechsstufigen
licht werden, welche relevanten, d. h. mit dem eigenen Fahr- Skala von 1 = „stimmt gar nicht“ bis 6 = „stimmt völlig“.
zeug interagierenden, Verkehrsteilnehmenden die Automa- Die Ergebnisse zeigten eine eher hohe Technikaffinität in
tion wahrgenommen und bei ihrer Handlungsplanung be- der Gesamtstichprobe (M = 4,40; SD = 0,88). Die Akquirie-
rücksichtigt hat. Hierdurch soll die Transparenz des Au- rung der Versuchsteilnehmenden erfolgte über die Bekannt-
tomationsverhaltens erhöht und so eine Reduktion der sub- machung der Online-Studie via LinkedIn, Twitter, Mailing-
jektiven Unsicherheit der Fahrenden erreicht werden. Einen Listen und direkten Kontakt per Email mit Versuchsteil-
Transfer des iHMI-Konzepts für hochautomatisierte Fahr- nehmenden der DLR-Testfahrerdatenbank. Die Teilnahme
zeuge (SAE 4) im urbanen Verkehrsraum wurde ebenfalls an der Online-Studie erfolgte auf freiwilliger Basis und oh-
[57] realisiert und sollte in dieser Studie weiter evaluiert ne Bezahlung. Die Teilnehmenden konnten sich jedoch an
werden. Im Mittelpunkt stand hierbei der Einfluss einer hö- einem Gewinnspiel beteiligen, bei dem vier Amazon-Gut-
her-komplexen und schwieriger vorhersehbaren Verkehrs- scheine im Wert von jeweils 25 C verlost wurden.
umgebung auf mögliche subjektive Unsicherheiten der Nut-
zenden von AFs. 4.2.1 Studie 2: Fahrt im Shared Space
Die im Folgenden dargestellte Untersuchung soll die
Forschungsfrage bezüglich des optimalen Darbietungszeit- Die Studie wurde in Form einer experimentellen Online-
punkts bzw. der Darbietungsdistanz eines adaptiven iHMI Studie durchgeführt, bei der die Nutzenden als Co-De-
untersuchen. Die Konkrete Forschungsfrage der Untersu- signende für das nutzerfokussierte, adaptive HMI direkt
chung lautet daher: Zu welchem Zeitpunkt bzw. bei welcher in den Gestaltungsprozess der Interaktion der Automation
Distanz wünschen sich die Nutzenden eines hochautomati- mit den Nutzenden einbezogen wurden. Im Mittelpunkt
sierten Fahrzeugs (SAE 4) eine Rückmeldung zu anderen der Untersuchung stand der Zeitpunkt bzw. die Distanz
Verkehrsteilnehmenden durch ihr iHMI? Zur Beantwortung des eigenen AF zu anderen Verkehrsteilnehmenden, bei
dieser Forschungsfrage wurden die Teilnehmenden der On- der sich die Nutzenden eine Informationsrückmeldung
line-Studie eingeladen, als Co-Designende für ein adapti- über das Erkennen der Automation dieser Verkehrsteil-
ves iHMI ihre Informationsbedürfnisse hinsichtlich dieser nehmenden über das iHMI wünschen. Hierfür wurden
Fragestellung direkt in die iHMI-Interaktionsgestaltung ein- unterschiedliche, in der Grafikengine Unreal Engine 4 er-
zubringen. Die für nutzerfokussierte Systeme erforderliche stellte, Videoausschnitte mit einem strukturierten Interview
Zustandserfassung von Nutzenden wurde damit quasi si- (Fragebogen) kombiniert. Die Gesamtdauer der Studie lag
muliert und durch die Bewertung der Studienteilnehmer er- bei durchschnittlich 20 min (SD = 6). Zur Untersuchung der
setzt. Zusätzlich wurde im Rahmen der Online-Studie auch Forschungsfrage wurde ein einfaktorielles Untersuchungs-
die User Experience (UX) für die Interaktion der Nutzen- design mit Messwiederholung verwendet. Als unabhängige
den mit diesem im Co-Design-Prozess entstandenen iHMI Variable (UV) wurde die Art des verkehrlichen Interakti-
untersucht. onspartners in den dargebotenen Videos in einer dreifachen
Insgesamt nahmen 106 Versuchsteilnehmende (38 Frau- Stufung (männlicher erwachsener Fußgänger vs. männ-
en, 65 Männer, einmal divers und zweimal ohne Anga- licher erwachsener Fahrradfahrer vs. weibliches Kind)
be des Geschlechts) an der Online-Studie teil. Das mittle- systematisch manipuliert. Alle Versuchsteilnehmenden er-
KForsch Ingenieurwes
lebten und beurteilten sämtliche Ausprägungen der UV. Als teraktionspartner im Verkehr wäre möglicherweise ein un-
abhängige Variable (AV) wurde zum einen die individuelle erwünschter extremer Anker gewesen (auch bei Randomi-
Distanz erhoben, bei welcher sich die Versuchsteilnehmen- sierung), der alle folgenden Bewertungen hätte beeinflussen
den eine Systemrückmeldung wünschen (BZV), um keine können. Um diesen möglichen Ankereffekt auszuschließen,
Unsicherheit in der Interaktion des hochautomatisierten wurde eine starre Reihenfolge der Verkehrsteilnehmer ge-
Fahrzeugs (SAE 4) mit einem anderen Verkehrsteilneh- wählt, die in der Interaktion mit dem Kind kulminierte.
menden zu verspüren. Zum anderen wurde der bevorzuge Als Verkehrsumgebung wurde ein Shared Space ausgewählt
Zeitpunkt für eine Systemrückmeldung des iHMI mittels (Abb. 3). Hierbei handelt es sich um einen wenig regu-
eines Items näher bestimmt, in Bezug auf Sichtbarkeit von lierten Verkehrsraum, der keine klaren Fahrbahnbegrenzun-
anderen Verkehrsteilnehmenden sowie in Bezug auf den gen aufweist und auf dem sich alle Verkehrsteilnehmenden
Bremsvorgang des eigenen hochautomatisierten Fahrzeugs. gleichberechtigt bewegen. Lediglich die erlaubte Höchstge-
Um die ganzheitliche User Experience (UX) des Anzeige- schwindigkeit und die Vorfahrt (rechts vor links) sind auf
und Interaktionsdesigns zu bestimmen, wurde der stan- einem Shared Space reguliert. Die verwendeten Videos ver-
dardisierte Fragebogen UEQ-S [59] in die Untersuchung setzten die Versuchsteilnehmende in die Perspektive eines
integriert. Hierbei konnten die Versuchsteilnehmenden auf Nutzenden eines hochautomatisierten Fahrzeugs (SAE 4).
einer siebenstufigen Skala mit semantischen Differenzialen Für die Darstellung des iHMI wurde ein computergenerier-
ihre Einschätzung zur UX des HMI auf den Subskalen der tes Video mit Hilfe der Grafikengine Unreal Engine 4 aus
pragmatischen und hedonischen Qualität bewerten. Diese der Perspektive des Innenraums eines hochautomatisierten
Bewertung bezog sich auf das iHMI inklusive der individu- Fahrzeugs verwendet.
ell von den Teilnehmenden als Co-Designer eingestellten Als iHMI wurde ein im Fahrzeuginnenraum verbautes
Systemrückmeldungen über erkannte andere Verkehrsteil- 360°-LED-Lichtband genutzt. Durch ein blaues Leuchten
nehmende, also ganz im Sinne eines nutzerfokussierten des 360°-LED-Lichtbands wurde den Nutzenden mitgeteilt,
HMI. dass sich die Automation im hochautomatisierten Modus
Die Abfolge der verkehrlichen Interaktionspartner wurde (SAE 4) befand und kein eigenes Eingreifen notwendig
über alle Versuchsteilnehmende konstant gehalten. Der er- war (Abb. 4). Zusätzlich kommunizierte das LED-Licht-
wachsene Fußgänger stellte den ersten Interaktionspartner band als iHMI richtungsaufgelöste Informationen in Form
dar. Darauf folgte der erwachsene Fahrradfahrer und ab- von Lichtsignalen direkt auf dem LED-Lichtband selbst.
schließend die Interaktion mit einem Kind. Da von einem Hierdurch sollte dem Nutzenden mittels intelligenter Sys-
stärkeren Grad der Fahrgastverunsicherung im Kontakt mit temrückmeldung des iHMI verdeutlicht werden, welche
schwächeren Verkehrsteilnehmenden ausgegangen werden Verkehrsteilnehmende die Automation wahrgenommen
kann, wurden für die hier vorliegende Studie ausschließ- hatte, um das Bedürfnis der Nutzenden, die Automation
lich schwache bzw. verletzliche Verkehrsteilnehmende ver- zu verstehen, zu befriedigen. Für diese Systemrückmel-
wendet. Darüber hinaus wurde durch eine Interaktion mit dung des iHMI, wurde ein dunkelblauer Balken auf dem
einem Kind ein besonders schützenswerter und in seinen LED-Lichtband angezeigt (Abb. 4). Hierbei wurde der
Handlungen eher unvorhersehbarer Verkehrsteilnehmer in dunkelblaue Balken jeweils unterhalb (aus Perspektive der
die Studie inkludiert. Die Autoren gehen von einem star- Nutzenden) des detektierten Verkehrsteilnehmenden ange-
ken Einfluss des besonders schützenswerten Verkehrsteil- zeigt. Der dunkelblaue Balken folgte dem Verkehrsteilneh-
nehmers (Kind) auf die empfundene subjektive Unsicher-
heit und den daraus resultierenden Informationsbedarf des
AF-Nutzenden aus. Dieser starke Einfluss des Kindes als In-
Abb. 4 Darstellung des blau erleuchteten LED-Lichtbands (iHMI) und
des dunkelblauen Balkens zur Verdeutlichung wahrgenommener Ver-
kehrsteilnehmender durch die Fahrzeugautomation im AF bei Unsi-
Abb. 3 Verwendetes Szenario eines Shared Space cherheit der Nutzenden
KForsch Ingenieurwes
menden positionsgetreu auf dem 360°-LED-Lichtband, um AF musste ihm regelkonform Vorfahrt gewähren. Das AF
dem Nutzenden kontinuierlich eine Systemrückmeldung verringerte hierzu seine Geschwindigkeit und kam schließ-
über die Position des detektierten Verkehrsteilnehmenden lich zum Stillstand, um den anderen Verkehrsteilnehmenden
zu geben. Durch diese intelligente Interaktionsstrategie queren zu lassen. Sobald der Fahrweg wieder frei war, be-
sollte dem Nutzenden verdeutlicht werden, dass detektierte schleunigte das AF und setzte seine Fahrt über den Shared
Verkehrsteilnehmende bei der Auswahl zukünftiger Hand- Space fort. Kurz darauf endete das Video. Nachdem die Ver-
lungen des AF berücksichtigt werden. Ziel des iHMI war suchsteilnehmenden in einem ausführlichen Übungsdurch-
es, die Transparenz des Automationsverhaltens zu erhö- gang das Funktionskonzept des iHMI mit einem fixen In-
hen und so subjektive Unsicherheit der AF-Nutzenden zu formationsdarbietungszeitpunkt (Beginn der Bremsung des
reduzieren bzw. zu vermeiden. AF, Distanz zum anderen Verkehrsteilnehmer 5 m) betrach-
Zu Studienbeginn gaben alle Versuchsteilnehmende zu- ten konnten, folgten die Experimentaldurchgänge, in denen
nächst ihr Einverständnis zur Aufzeichnung und Verarbei- die Versuchsteilnehmenden als Co-Designende den für sie
tung ihrer Angaben im Zuge der wissenschaftlichen For- optimalen Zeitpunkt der Informationsdarbietung auf dem
schung. Es folgte ein kurzes Beispielvideo, um die techni- iHMI definieren konnten. Um dies zu erreichen, wurden
schen Voraussetzungen des Abspielgeräts der Studienteil- alle Versuchsteilnehmende bezüglich ihrer neuen Aufgabe
nehmenden zu testen. Hiernach folgte die Erfassung de- und des Aufbaus der Eingabemaske instruiert. In den Expe-
mographischer Daten und die Instruktion für den Übungs- rimentaldurchgängen wurden Videos mit unterschiedlichen
durchgang. Vor dem Übungsdurchgang wurden die Ver- Verkehrsteilnehmenden (erwachsener Fußgänger, Fahrrad-
suchsteilnehmenden bezüglich der Funktionsweise des AF fahrer, Kind), jedoch mit jeweils identischen Geschwindig-
und des iHMI aufgeklärt und instruiert, lediglich das Vi- keiten der Verkehrsteilnehmenden und einem identischen
deomaterial zu betrachten. In dem Video des Übungsdurch- Ablauf verwendet. Hierbei folgten die Experimentaldurch-
gangs erlebten die Versuchsteilnehmenden aus der Perspek- gänge dem Ablauf des Übungsdurchgangs. Während der
tive des Nutzenden eines AF die Interaktionen zwischen Experimentaldurchgänge wurde jedoch kein fixer Informa-
dem AF und einem bevorrechtigen Verkehrsteilnehmenden tionsdarbietungszeitpunkt auf dem iHMI präsentiert. Die
in einer Rechts-vor-links-Situation auf einem Shared Space. Aufgabe der Versuchsteilnehmenden bestand vielmehr da-
Hierbei durchfuhr das AF mit einer Geschwindigkeit von rin, die Videos zu dem für sie individuell optimalen Zeit-
20 km/h den Shared Space und begegnete einem kreuzenden punkt einer Systemrückmeldung zu stoppen und die je-
Fußgänger. Da der andere Verkehrsteilnehmende aus einer weilige Distanz zum anderen Verkehrsteilnehmenden (je-
Einmündung auf den Shared Space kam, war er zu Beginn weils im Videomaterial eingeblendet) in ein Antwortfeld
des Videos verdeckt und wurde erst bei einer Distanz von einzutragen. Dieser selbsteingestellte Zeitpunkt sollte ih-
40 m (AF zu anderen Verkehrsteilnehmenden) sichtbar. Der rem Bedürfnis, das Verhalten der Automation zu verste-
andere Verkehrsteilnehmende bewegte sich mit einer kon- hen und damit ihre subjektive Unsicherheit zu reduzieren,
stanten Geschwindigkeit von 4,5 km/h auf einer kreuzenden nahekommen. Dieser Vorgang wiederholte sich für jeden
Trajektorie zum AF (Abb. 3). Der von rechts kommen- der drei Verkehrsteilnehmenden (Erwachsender Fußgänger,
de Verkehrsteilnehmende war vorfahrtsberechtigt und das Fahrradfahrer, Kind). Zum Abschluss der Untersuchung be-
Abb. 5 Mittlere Wunschdistanz
für eine Systemrückmeldung
über das iHMI eines erkannten,
bevorrechtigt interagierenden
Verkehrsteilnehmenden, um
keine subjektive Unsicherheit zu
empfinden (** p < 0,001)
KForsch Ingenieurwes
antworteten die Versuchsteilnehmenden ergänzende Fragen radfahrer zeigte sich eine Tendenz, jedoch kein signifikanter
zum optimalen Zeitpunkt der Systemrückmeldung und be- Unterschied (p = 0,058).
urteilten das im Sinne eines nutzerfokussierten Co-Designs Die subjektiven Aussagen der Versuchsteilnehmenden
mitgestaltete iHMI bezüglich der wahrgenommenen User zum gewünschten Zeitpunkt für eine Systemrückmeldung
Experience (UEQ-S [59]). über das iHMI unterstreichen diesen Befund (Abb. 6). Ei-
ne Systemrückmeldung schon beim ersten Auftauchen des
4.2.2 Ergebnisse Verkehrsteilnehmers wünschten sich 68 % aller Versuchs-
teilnehmenden, wenn es sich um ein Kind als Interaktions-
Die erste Fragestellung bezog sich auf den Zeitpunkt bzw. partner im Verkehr handelte. Auch bei einem Fahrradfahrer
die Distanz, ab welcher sich Nutzende eines AF eine wünschten sich bereits 56 % aller Versuchsteilnehmenden
Systemrückmeldung über erkannte, interagierende Ver- eine Systemrückmeldung bei Sichtbarkeit des Verkehrsteil-
kehrsteilnehmende in ihrer Fahrzeugumgebung wünschten. nehmers. Der erwachsene Fußgänger sollte hingegen nur
Durch die Rückmeldung der erkannten Verkehrsteilneh- bei 42 % der Versuchsteilnehmenden schon bei Sichtbar-
menden soll die Unsicherheit der Nutzenden bezüglich des keit angezeigt werden. Unabhängig vom Verkehrsteilneh-
zukünftigen Fahrzeugverhaltens der Automation verringert mer wünschten sich 89 % der Versuchsteilnehmenden eine
werden. Hierbei konnten die Versuchsteilnehmenden den Systemrückmeldung über das iHMI schon vor dem Brems-
individuellen Zeitpunkt der Rückmeldung frei wählen und vorgang.
auf ihre Bedürfnisse anpassen. Da auch die Art der in- Um die UX des Anzeige- und Interaktionsdesigns des
teragierenden Verkehrsteilnehmenden einen Einfluss auf iHMI mit selbstgewähltem Zeitpunkt der Systemrückmel-
das individuelle Bedürfnis nach Systemrückmeldung über dung zu überprüfen, wurde die Kurzform des UEQ-S [59]
das iHMI haben könnte, wurde die Wunschdistanz für verwendet. Die in Abb. 7 dargestellten Ergebnisse zeigen
eine Systemrückmeldung für drei unterschiedliche inter- überdurchschnittlich hohe Ergebnisse in den beiden Sub-
agierende Verkehrsteilnehmende (Erwachsener Fußgänger skalen „pragmatische Qualität“ und „hedonische Qualität“.
vs. Fahrradfahrer vs. Kind) untersucht. In Abb. 5 sind die Hierbei wird die einfache, effiziente und unterstützende
Ergebnisse zur gewünschten mittleren Distanz für eine Komponente des Anzeige- und Interaktionskonzepts des
Systemrückmeldung über das iHMI bei der Annäherung an iHMI in seiner pragmatischen Qualität positiv hervorgeho-
alle drei Verkehrsteilnehmende dargestellt. ben. Diese Bewertung unterstreicht das Potenzial des vor-
Eine Varianzanalyse mit Greenhouse-Geisser-Korrektur gestellten iHMI im Sinne eines nutzerfokussierten Designs,
zeigte signifikante Unterschiede für die mittlere gewünsch- dem Bedürfnis von Nutzenden, das Verhalten der Automa-
te Distanz einer Systemrückmeldung (F(1,82; 191) = 23,37; tion im Verkehr zu verstehen, entgegenkommen zu können.
p < 0,001; partielles η2 = 0,182). Ein Bonferroni-korrigierter
post-hoc Test zur Aufklärung des gefunden großen Effek-
tes zeigte jeweils einen signifikanten Unterschied (beide 5 Diskussion
p < 0,001) der gewünschten Distanz für ein Systemfeedback
zwischen den Verkehrsteilnehmern Kind und erwachsener Im Rahmen dieser Veröffentlichung wurde der Ansatz der
Fußgänger (4,14 m; 95 %-CI [2,77; 5,52]) und zwischen nutzerfokussierten Automation eingeführt. Dieser Ansatz
dem Kind und dem Fahrradfahrer (2,48 m; 95 %-CI [1,13; propagiert, Systeme so zu gestalten, dass zwei grundlegen-
3,83]). Für den Vergleich erwachsener Fußgänger und Fahr- de, menschliche Bedürfnisse erfüllt werden: das Bedürf-
Abb. 6 Prozentuale Häufigkeit
der Aussagen von Versuchsteil-
nehmenden zum gewünschten
Zeitpunkt der Systemrückmel-
dung auf dem iHMI für inter-
agierende Verkehrsteilnehmende
KSie können auch lesen