Augmented Reality Darstellung von WLAN-Netzwerken
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Universität Rostock
Fakultät für Informatik und Elektrotechnik
Institut für Informatik
Lehrstuhl für Informations- und Kommunikationsdienste
Augmented Reality Darstellung
von WLAN-Netzwerken
Bachelorarbeit
Erstgutachter & Betreuer: Dr. Thomas Mundt
Zweitgutachter : Dipl.-Inf. Martin Garbe
vorgelegt von: Daniel Odebrecht
Abgabedatum: 24/01/2012
INHALTSVERZEICHNIS
1 Einleitung ....................................................................................................................................................... 3
2 Technische Grundlagen von Augmented Reality ........................................................................... 4
2.1 Darstellung ........................................................................................................................................... 5
2.1.1 Bildschirmdarstellung ........................................................................................................... 5
2.1.2 Head-Mounted-Display (HDM) .......................................................................................... 6
2.1.3 Head-Up-Display (HUD) ........................................................................................................ 7
2.1.4 Kontaktlinse ............................................................................................................................... 8
2.1.5 Mobile Geräte ............................................................................................................................ 9
2.1.6 Video- Und Laserprojektion .............................................................................................. 11
2.2 Tracking............................................................................................................................................... 11
2.2.1 Trackingtechniken................................................................................................................. 12
2.2.2 Nichtvisuelles Tracking ....................................................................................................... 12
2.2.3 Visuelles Tracking.................................................................................................................. 17
2.3 Softwareframeworks ..................................................................................................................... 21
2.4 AR-Software für Smartphone's .................................................................................................. 24
2.4.1 Browser...................................................................................................................................... 24
2.4.1 Wikitude World Browser.................................................................................................... 24
2.4.2 Layar Reality Browser ......................................................................................................... 27
2.4.3 Junaio .......................................................................................................................................... 28
3 Konzeption ................................................................................................................................................... 29
3.1 Die Opennet Initiative.................................................................................................................... 30
3.2 Architektur ......................................................................................................................................... 31
3.2.1 Die App ....................................................................................................................................... 33
3.2.2 Der Webservice....................................................................................................................... 34
4 Umsetzung ................................................................................................................................................... 36
4.1 Serverkomponenten....................................................................................................................... 36
4.1.1 Die Steuerskripte ................................................................................................................... 36
4.1.2 Die Transformation ............................................................................................................... 38
4.1.3 Der Webservice....................................................................................................................... 42
4.2 Die App.................................................................................................................................................43
5 Zusammenfassung .................................................................................................................................... 51
6 Literaturverzeichnis ................................................................................................................................ 54
2
1 EINLEITUNG
Zu Beginn sollte der Ausdruck Augmented Reality(AR) erläutert werden, welcher mit
erweiterter Realität übersetzt wird. Dies deutet bereits an, dass es sich hier um
einen Zwischenraum handelt. Der Realität, wie wir sie wahrnehmen, steht hierbei
eine virtuelle computergenerierte Realität gegenüber. Computergenerierte Welten
sind seit Kinofilmen wie Toy Story wohl jedem bekannt und werden in der
Unterhaltungsindustrie bis hin zur Ausbildung, z.B. von Piloten in Simulatoren, in
vielen Bereichen genutzt. Nach Ron Azuma bildet die Augmented Reality nun einen
Mittelbereich zwischen der völligen Synthetik der virtuellen Welt und der reellen Welt, in
dem virtuelle Objekte mit der realen Welt kombiniert werden. [1]
Dies erreicht man, indem mittels Kamera ein reales Bild aufgenommen wird, in das
anschließend virtuelle Objekte eingefügt werden. Diese virtuellen Objekte sollten
typischerweise einen Kontext zu den Inhalten des realen Bildes haben, da zum
Beispiel der Batteriestatus einer Kamera, welcher in das Bild eingeblendet wird,
hier nicht als Augmented Reality betrachtet wird. Die Anwendungen für AR
müssen also zwischen den virtuellen Objekten und denen des realen Bildes eine
sinnvolle Verbindung herstellen. Das kann geschehen durch Erkennen von
Objekten und/oder durch Ortsbestimmung. So können dann zu den Objekten oder
Orten bekannte Daten in das Bild integriert werden. Hieraus ergeben sich schon
einige der typischen Anforderungen an ein AR-System.
• Kombination realer Bilder mit Computergrafik
• Erkennen von Objekten in Echtzeit
• Interaktion mit den erkannten Objekten anbieten
• Darstellung von kontextbezogenen Daten in Echtzeit [2]
• Positions- und Lagebestimmung sowie Einbinden ortsbezogener Daten
Aufgrund der Anforderungen waren AR-Systeme meist speziell für den jeweiligen
Anwendungsfall angepasst. Es wird oft viel Sensorik und Rechenleistung benötigt
um die Grafiken passend in Echtzeit in das Bild einzufügen. Das Militär nutzte diese
Technologie dann schon früh in Flugzeugcockpits, um z. B. den künstlichen
Horizont einzublenden.
3
Die Sensoren waren alle vorhanden und die Anzeige konnte mittels Head-Up-
Display direkt in das Sichtfeld hinein projiziert werden. Im zivilen Bereich möchte
ich als weiteres Beispiel die Produktherstellung nennen. Dort werden "CAD/CAM-
Daten direkt auf das Werkstück projiziert, wodurch Fertigungsfehler sofort
erkennbar sind". [3] Inzwischen begegnet uns die Augmented Reality auch bei
diversen Sportereignissen, wo Linien helfen sollen, ein Abseits beim Fußball oder
eine Bestmarke beim Skiweitsprung schneller erkennen zu können. Ein
aufstrebender Trend ist AR auf Smartphone's. Hier wird neben Display und
Kamera inzwischen eine Vielzahl von Sensoren verbaut, um zum Beispiel die
Position und Lage zu ermitteln, womit sich ortsbezogene AR-Anwendungen für
eine Vielzahl von Inhalten umsetzen lassen. Die technischen Voraussetzungen für
die jeweiligen AR-Anwendungsarten sollen in dieser Arbeit gezeigt werden sowie
der Trend und Stand der Technik von AR-Anwendungen auf Smartphone's im
Speziellen. Anschließend wird eine Applikation (App) implementiert, welche die
AR-Technik einsetzt, um die Leistungsdaten eines freien Funknetzes einer
Großstadt zu visualisieren. Anwendungen solcher Art finden sich in verschiedenen
Bereichen. Hier dient sie zur Hilfe bei Montage oder Wartung. Ähnliche
Anwendungen können auch im Alltag zur Orientierung in Großstädten oder als
Infotainment z. B. bei Stadtrundfahrten genutzt werden. Mit steigender Leistung
der mobilen Geräte, lassen sich auch AR-Anwendungen realisieren, die
Markierungen oder Bilderkennung ohne Hilfsmittel einsetzen. Diese Techniken
werden vorrangig bei Werbung und Unterhaltungssoftware verwendet, um
Interaktivität mit dem Nutzer zu ermöglichen.
2 TECHNISCHE GRUNDLAGEN VON AUGMENTED REALITY
Um ein AR-System zu realisieren, sind die zwei Aspekte Darstellung und Tracking
nötig. Das Tracking dient dazu reale Objekte und deren Position zu erkennen. Die
Darstellung visualisiert dazu, die virtuellen Elemente. Zu beidem gibt es eine
Vielzahl von Technologien, über die nun eine Übersicht folgt.
4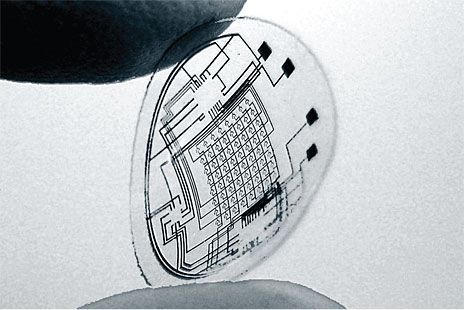
2.1 DARSTELLUNG
Je nach Anwendungsgebiet kommen unterschiedliche User-Interfaces(UI) zum
Einsatz, welche zwischen einem Softwareprodukt und dem Endbenutzer, d.h. die von
Seiten des Softwareprodukts vorgegebene Art und Weise der Interaktion (z.B.
Führung des Benutzers, Möglichkeiten des Benutzers, selbst initiativ zu werden,
Menütechnik, Maske) realisieren. [4] Abhängig vom UI werden verschiedene
Verfahren benutzt, um die virtuellen Elemente hinein zu projizieren. Hierbei
nennen [5] und [2] die folgenden Methoden.
• Bildschirmdarstellung
• Head-Mounted-Display (HDM)
• Head-Up-Display
• Kontaktlinse
• Mobile Geräte
• Video- oder Laserprojektion
2.1.1 BILDSCHIRMDARSTELLUNG
Bei der Bildschirmdarstellung kommen handelsübliche Monitore oder
Fernsehgeräte bei der Darstellung zum Einsatz. Als Beispiel sei hier nochmals die
Fußballübertragung genannt, dabei können zusätzliche Informationen wie
Abstände auf dem Platz eingeblendet werden. Denkbar wäre auch ein
Heimrechner mit Webcam, der gemarkerte Objekte erkennt und mit vordefinierten
Modellen überlagert. Die Kamera ist hier allerdings selten wirklich in Blickrichtung
des Bildschirms ausgerichtet, sondern steht getrennt vom Display. Der Vorteil liegt
hier bei den geringen Kosten der Komponenten, so dass dies zur Probe einlädt. Die
resultierenden Systeme sind aber kaum interaktiv und durch das statische Display
kommt es kaum zur Immersion. Es wird wie bei der Sportübertragung eher ein
kurzer und knapper Informationsgewinn erzeugt.
5
2.1.2 HEAD-MOUNTED-DISPLAY (HDM)
Bei einem Head-Mounted-Display ist der Bildschirm im Sichtfeld des Benutzers
direkt am Kopf befestigt, ebenso wie die in Blickrichtung zeigende Kamera (siehe
Abb. 1). Je nach Art der Überlagerung von realen und virtuellen Bildteilen muss
hierbei zwischen „video-see-through“ (VST) und „optical-see-through“ (OST)
unterschieden werden.[1][6] Bei VST-Systemen wird mittels der Kamera die reale
Umgebung aufgezeichnet und versucht, passende Objekte in das Bild einzufügen,
welches dann auf dem Display dargestellt wird. Die komplette Umgebung wird
durch den Benutzer über das Display wahrgenommen.
Im Gegensatz dazu werden bei OST-Systemen die virtuellen Objekte auf einen
halbdurchlässigen Spiegel projiziert, so dass der Benutzer die reale Welt direkt
wahrnimmt und die zusätzlichen Informationen im Sichtfeld entstehen. Die
Überlagerung der Darstellungen erfolgt dann im Auge des Benutzers.
Abb. 1 Head-Mounted-Display (Modell Vuzix Star 1200)
Die Vorteile der HMDs liegen darin, dass der Benutzer sich sehr frei bewegen kann.
Der Einsatz für solche Systeme ist damit breiter gefächert. Dem stehen einige
Nachteile entgegen, wie z. B. die teurere Hardware, welche am Körper getragen
werden muss. Die ersten Modelle mussten aufgrund ihres Gewichtes noch von
6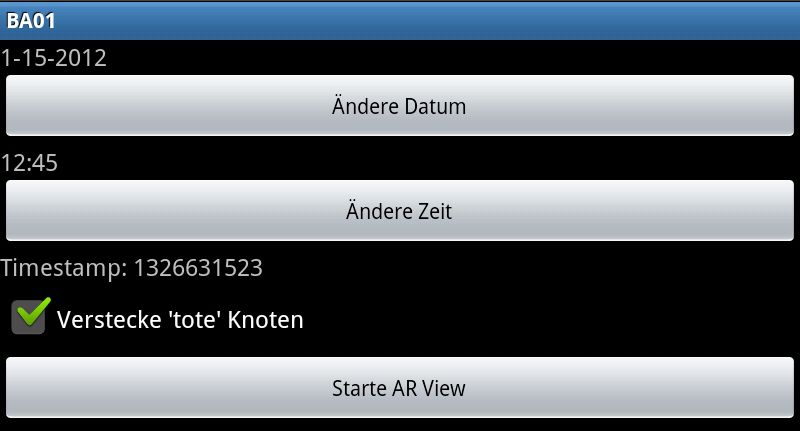
externen Hilfsmitteln gehalten werden, während inzwischen aber schon relativ
handliche Hardware verfügbar ist. Bei dieser Art Anwendung steigt der
Rechenaufwand enorm, da z.B. bei VST-Systemen zwischen Aufnehmen der Szene
und Darstellung auf den Displays kaum Verzögerungen auftreten dürfen. Die
zeitliche Differenz zwischen der Bewegung des Nutzers und der Darstellung führt
sonst zu Orientierungsproblemen. Problematisch ist zudem, dass die Displays in
fixer Entfernung zum Auge stehen, während die dargestellten Objekte sich weit
weg befinden können. Das Auge fokussiert bei unterschiedlich fernen Objekten
jeweils anders, muss hier aber aufgrund des nahen Displays konstant fokussiert
sein. Dies kann zu Schwindelgefühlen und Kopfschmerzen führen.
2.1.3 HEAD-UP-DISPLAY (HUD)
Wie schon in der Einleitung erwähnt, war das Head-Up-Display eine der ersten
eingesetzten Anwendungen von Augmented Reality. Das Militär nutzt es, um
Informationen wie Flughöhe und künstlichen Horizont in das Sichtfeld von
Kampfjetpiloten einzublenden. Heute wird im zivilen Bereich versucht, diese
Technologie für den Einsatz in Fahrzeugen zu nutzen, damit die Fahrer den Blick
nicht mehr von der Straße nehmen müssen, um z.B. die Geschwindigkeit oder
Navigationsinformationen abzulesen. [7] Die Technologie gleicht den OST-
Systemen, welche in 2.1.2 beschrieben wurden. HUDs kommen bei festgelegten
Blickrichtungen zum Einsatz, wo dem Nutzer ermöglicht werden soll, zusätzliche
Informationen aufzunehmen, ohne den Blick abwenden zu müssen.
7Abb. 2 Head-Up-Display (BMW, 2011)
2.1.4 KONTAKTLINSE
Kontaktlinsen lassen sich mit winzigen Stromkreisen und LEDs ausstatten, so dass
damit Einblendungen in das Sichtfeld möglich werden. (siehe Abb. 3) Diese
Technologie ist noch nicht ganz bereit für echte AR-Anwendungen, da erste einige
wenige LEDs aufgebracht werden können. Die Anzahl soll aber auf Hunderte
erhöht werden, um damit in der Lage zu sein, Text, Tabellen und Bilder
darzustellen. [8] Die Anwendungen wären vielfältig, je nachdem wie viel
zusätzliche Sensorik und Elektronik eingesetzt wird. Parviz nennt zum Beispiel
einen Glucosesensor, der es Diabetikern ermöglichen würde, ihren Glucosespiegel
zu überwachen, ohne sich in den Finger zu stechen und messen zu müssen. Hier
würden auch schon wenige Pixel reichen, die im Notfall als Indikator aufleuchten.
8Abb. 3 Kontaktlinse (Parviz, University of Washington 2009)
Die Herausforderung besteht darin, die natürliche Sicht durch die integrierten
Komponenten nicht zu behindern. Die Herstellung der Linse ist ebenfalls recht
schwierig, da z.B. Bestandteile der LED giftig sind, so dass diese speziell
abgeschirmt werden müssen. Ein scharfes Bild direkt auf dem Auge zu erzeugen,
ist ebenso problematisch und wird gelöst, indem vor den LEDs mehrere Minilinsen
integriert werden, so dass die Darstellung erscheint, als würde sie je nach
verwendeter Linse etwa einen halben Meter vor einem schweben.
2.1.5 MOBILE GERÄTE
Die mobilen Geräte, allen voran Mobiltelefone, sind zu einer ernsthaften und
verlockenden Plattform für mobile AR-Anwendungen geworden, da sie typischer
Weise alles nötige Equipment für video-see-through AR-Anwendungen bereitstellen:
Einen Computer [...], eine Kamera und ein Display. [9] Eine Kamera ist dabei meist
auf der Gegenseite zum Display verbaut, so dass im wesentlichen wie bei HMDs als
VST-System vorgegangen wird, nur dass das Gerät dabei in das Sichtfeld gehalten
werden muss und nicht am Kopf getragen wird. Klein führt weiter an, dass mit der
steigenden Qualität der Kameras und der Rechenleistung der verwendeten
Prozessoren bald auch ein wesentlich besseres optisches Tracking, insbesondere
9das Tracking ohne Verwendung von Markern [Anm. d. Verf.], möglich wird, was die
Möglichkeiten für Augmented Reality noch wesentlich erweitern würde. Mobile
Plattformen, zu denen auch noch Tablets zu nennen sind, beherbergen neben der
Kamera auch noch eine große Anzahl weiterer Sensoren zur Orts- und
Lagebestimmung, welche später beim Tracking noch beleuchtet werden.
Abb. 4 AR-Anwendung auf Smartphone (Samsung Galaxy S Plus, 2011)
Die Vorteile der mobilen Geräte sind vielfältig. Sie lassen sich wie HMDs benutzen,
ohne aber alle Technik umständlich am Kopf tragen zu müssen. Es handelt sich um
Massenware, wodurch der Preis relativ gering ist und es eine weite Verbreitung
gibt. Die Vielfalt an Sensoren erlaubt viele Trackingtechniken und auch deren
Verbindung, wodurch eine große Zahl an AR-Anwendungen denkbar ist. Als
Nachteile werden kleine Displays und geringe Prozessorleistung genannt. [4]
Mobile Geräte mit größeren Displays werden inzwischen als Tablet-PC immer
verbreiteter. Die Leistung ist laut Klein [9] noch weit hinter der von Desktop-PCs,
aber durch die Forscher konnte gezeigt werden, dass selbst diese schon für visuelles
Echtzeittracking reicht.
102.1.6 VIDEO- UND LASERPROJEKTION
Neben den bisher genannten Darstellungsformen gibt es noch eine weniger
eingesetzte Methode, bei der die Informationen direkt auf die realen Objekte
projiziert werden. Dabei ist zwischen Video- und Laserprojektion zu
unterscheiden, welche verschiedene Vor- und Nachteile besitzen. Thomas
Schilling[3] bietet dabei folgenden Vergleich:
Videoprojektor: Laserprojektor:
Vorteile: - Vollfarbendarstellung möglich - die Darstellung ist auf der
- niedriger Anschaffungspreis gesamten Projektionstiefe
- standardisierte Bildausgabe scharf
- keine Linsenverzerrung
Nachteile: - Unschärfen im Bild bei der - relativ hohe
Darstellung außerhalb des Anschaffungskosten
Fokusbereiches - derzeit nur mit Aufwand
- Linsenverzerrung der eine Vollfarbendarstellung
Abbildung möglich
- stellt standardmäßig eine
Liniengrafik dar (keine
Vollflächengrafikausgabe)
2.2 TRACKING
Wie zuvor genannt, zählt zu den grundlegenden Eigenschaften einer Augmented
Reality Anwendung, dass zwischen den realen und virtuellen Objekten ein
Zusammenhang hergestellt wird. Um dies zu erreichen, müssen die realen Objekte
erkannt werden. Position und Lage müssen oft nicht nur für das Objekt bestimmt
werden, sondern auch für das Gerät selbst. "Der Prozess der Lagebestimmung wird
gemeinhin als Tracking bezeichnet." [10]
Bei den dabei eingesetzten Methoden geht es vor allem um die Notwendigkeiten
bei der Anwendung. AR-Anwendungen, die Chirurgen assistieren sollen, müssen
11natürlich ungleich genauer sein, als eine mobile Anwendung zum Auffinden der
nächsten U-Bahnhaltestelle.
2.2.1 TRACKINGTECHNIKEN
Die Aufgabe des Tracking's kann mit verschiedenen Sensoren und deren
jeweiliger Kombination gelöst werden. "Grundsätzlich können zwei verschiedene
Verfahren unterschieden werden: Nichtvisuelles und visuelles Tracking." [5] Das
visuelle bzw. optische Tracking teilt sich nochmal auf, je nachdem ob mit oder
ohne künstlichen Markern gearbeitet wird.
2.2.2 NICHTVISUELLES TRACKING
Es gibt eine Vielzahl an nichtvisuellen Trackingmethoden, so dass hier nur auf eine
Auswahl eingegangen wird, welche sich aus den Quellen [5], [11], [12] und [13]
zusammensetzt.
• GPS
• Gyroskope, Kompass
• Optische Sensoren
• Ultraschallsensoren
• magnetisches Tracking
• Accelerometer
• Positionsbestimmung per WLAN
GPS
Das Global Positioning System ist ein Satellitensystem, das zur Positions- und
Zeitbestimmung genutzt werden kann. [15] Es wurde in den 1970er-Jahren vom US-
Verteidigungsministerium entwickelt und aufgebaut. Seit den 1990er-Jahren ist es
voll funktionsfähig. Neben der militärischen Nutzung war auch eine zivile Nutzung
möglich, allerdings mit weniger Genauigkeit durch eine künstliche
Verschlechterung des Signals. Diese Selected Availability wurde im Jahr 2000
deaktiviert und erlaubt nun eine genauere Ermittlung des Standortes.
12Die Funktionsweise des Systems basiert auf Trilateration. Die Satelliten senden
ständig ihre Position und Uhrzeit aus. Aus diesen Signallaufzeiten können die
Empfänger dann ihre eigene Position berechnen. Für eine korrekte
Positionsbestimmung werden 4 sichtbare Satelliten benötigt. Theoretisch reichen
zwar 3 Satelliten, um die Position eines GPS-Empfängers aus den Laufzeiten zu
ermitteln(siehe Abb.5), aber die Uhr des Empfängers ist ungenau und hat eine
unbekannte Abweichung. Aus den Laufzeiten von vier Satellitensignalen kann die
Zeitabweichung der Empfängeruhr bestimmt werden, womit eine korrekte Lösung
des Gleichungssystems möglich ist. [11]
Abb. 5 Trilateration eines Punktes (schematische Darstellung von hopf.com)
Dabei werden mindestens 24 Satelliten gebraucht, um weltweite Erreichbarkeit zu
gewährleisten. Die Anzahl der Satelliten ist allerdings höhe,r um Ausfallsicherheit
und bessere Erreichbarkeit sicherzustellen. Abweichungen der Satellitenuhren
und -bahnen werden durch ein Netz aus Bodenstationen korrigiert. Heute lässt
sich die Position auf weniger als 10m genau bestimmen, was zur Navigation in
Autos oder für die Ortsbestimmung eines Handys ausreicht.
13Gyroskope/Kompass
Gyroskope bzw. Kompasse helfen, die Lage und Ausrichtung im Raum
nachzuvollziehen. Der Kompass basiert darauf, dass sich anhand des Magnetfeldes
der Erde eine Orientierung ermitteln lässt. Elektronische Kompasse können die
Himmelsrichtung sehr genau ermitteln.
Gyroskope ermöglichen es, Neigungen und Rotationen zu detektieren. Es gibt sie in
vielerlei Ausführungen. Die ersten mechanischen Gyroskope basieren darauf, dass
rotierende Elemente aufgrund der Drehimpulserhaltung stabil sind. Wird das
System extern rotiert, wirkt eine messbare Kraft. Mit 3 senkrecht zueinander
ausgerichteten Gyroskopen kann man also alle Orientierungsänderungen im Raum
nachvollziehen. Das Problem bei diesen Systemen ist der Drift, welcher entsteht
durch minimale Abweichungen der Achsen zueinander. [11] Es lassen sich
zuverlässigere optische Gyroskope bauen, indem man einen Laserstrahl mittels
Spiegeln durch eine Ringbahn lenkt. (siehe Abb. 6) Durch Einsatz von
halbdurchlässigen Spiegeln, wird der Strahl geteilt, so dass zwei Strahlen, welche
entgegengesetzt durch die Ringbahn laufen, entstehen. In Ruhe treffen beide
Strahlen gleich auf. Wird das System allerdings auf einer Normalenachse rotiert,
kommt es zu einer messbaren Phasenverschiebung.
Abb. 6 Ringlasergyroskop
14Ultraschallsensoren
Diese Sensoren können eingesetzt werden, um Entfernungen zu messen, indem in
kurzen Zeitintervallen Ultraschallimpulse ausgesendet werden. [12] Die Zeit bis
die Reflektion eintrifft, wird mittels Mikrofon gemessen. Bringt man mindestens 3
Sender, in einem bekannten Muster wie einem Dreieck, auf einem zu trackendem
Objekt an und misst deren Signallaufzeiten, kann man sowohl Orientierung als
auch Position des Objektes bestimmen. Als Vorteil gilt hierbei, dass die Sender
klein und leicht sind. Nachteilig sind die Ungenauigkeiten, welche dadurch
entstehen, dass der Schall temperatur- und druckabhängig ist. Außerdem nimmt
die Signalstärke mit Entfernung ab, was keinen Einsatz über zu große Distanzen
zulässt. [11]
Optische Sensoren
Als Beispiel wird hier Infrarotlicht behandelt. Mittels Pulsphasenmodulation lassen
sich Nachrichten codieren, welche von einem Sensornetzwerk ausgewertet werden
können. Sendet man kontinuierlich in festen Zeitabständen, lässt sich das
sendende Objekt durch das Sensornetzwerk verfolgen. [14] Die Vorteile liegen
dabei in den günstigen Komponenten. Als Nachteil zeigt sich, dass das Signal leicht
unterbrochen werden kann und nur eine geringe Reichweite hat.
Magnetisches Tracking
Es werden Spulen am zu verfolgenden Objekt angebracht, welche orthogonal zu
einander ausgerichtet sind. Um nun Lage und Position bestimmen zu können, wird
der induzierte Fluss von einem Sensor gemessen. Da durch die drei Spulen ein
Referenzsystem aufgestellt wurde, kann hieraus die Orientierung ermittelt
werden. [12] Da magnetische Tracker billig, leicht und kompakt sind, werden diese
gern eingesetzt. Die Reichweite der Systeme ist allerdings durch die Dämpfung des
Signals begrenzt. [11] Aufgrund der Nebeneffekte des elektromagnetischen Feldes
können die Signale nicht beliebig verstärkt werden.
15Accelerometer
Beschleunigungssensoren benutzen eine Masse, an welcher auftretende
Trägheitskräfte gemessen werden. Die Masse kann z.B. auf einem
piezoelektrischen Kristall befestigt werden. Durch eine Beschleunigung wird durch
die Trägheit der Masse ein Druck erzeugt, welcher wiederum aufgrund des
piezoelektrischen Kristalls einen messbaren elektrischen Effekt erzeugt. [11] Es
gibt eine Vielzahl an Möglichkeiten, den Sensor zu realisieren. So können auch
kapazitive Änderungen gemessen werden, wenn die Masse ein federnd gelagerter
Metallstab ist oder man nutzt den Hall-Effekt, um Änderungen der Spannung zu
messen, wenn die bewegte Masse sich durch ein Magnetfeld bewegt. [16] Aus
Silizium lassen sich auch kleinste Systeme bauen, welche selbst gegen starke
Änderungen der Beschleunigung resistent sind, wobei trotzdem eine hohe
Messgenauigkeit gewährleistet werden kann. Solche Accelerometer sind billig, da
sie inzwischen zur Massenware gehören und z.B. in Mobiltelefone eingebaut
werden .[17] Sofern Anfangsposition und –geschwindigkeit bekannt sind, lässt sich
durch zweifache Integration über die Zeit auch die Position ermitteln.
Positionsbestimmung per WLAN
Ein grobe Positionsbestimmung wird durch WLAN gewährleistet, wenn man den
Standpunkt eines Netzes kennt und dieses empfängt. Fertigt man hiermit eine
Karte an, kann man aufgrund der an einem Standort sichtbaren Netze einen
Rückschluss auf den ungefähren Aufenthaltsort fällen.
Ein wesentlich genaueres Orten ermöglicht der Einsatz des RADAR genannten
Systems. [18] Es wurde erforscht, um die Lücke zwischen groben Methoden wie
GPS und GSM-Ortung und Kurzdistanzansätzen wie Infrarot-Licht-Systemen zu
schließen. Verwendet wird handelsübliche Hardware um das WLAN zu betreiben.
Zur möglichen Ortung sind generell zwei Phasen nötig. Dabei gibt es eine
vorbereitende Offlinephase und eine Onlinephase, in der die eigentliche Ortung
vorgenommen wird. Während der Offlinephase wird eine Karte erstellt. Dazu wird
innerhalb des Netzes, welches mindestens drei Access Points (APs) haben sollte,
16eine große Zahl an Messungen vorgenommen. Dabei werden Signalstärke und
Signalrauschen zu den APs gemessen und zusammen mit Koordinaten in einer
Datenbank gespeichert. In der Onlinephase wird nun versucht, tatsächlich eine
Ortung durchzuführen, indem man wieder eine Messung der Signale der APs
vornimmt und dann in der Datenbank nach einem ähnlichen Eintrag sucht. Bei
mehreren in der Nähe befindlichen Referenzpunkten, gibt es keinen Grund nur den
am besten passenden anzunehmen, sondern es wird ein Mittel über die nahen
Referenzpunkte gebildet über das dann der Standpunkt angenommen wird. [18] Der
Vorteil dieses Systems ist, dass es gut innerhalb von Gebäuden funktioniert, im
Gegensatz zu anderen Ansätzen und nicht unter den Nachteilen von IR-Systemen,
wie die starke Störung und kurze Reichweite, leidet. Getestet wurde das System
allerdings in einer Etage. „Durch die Erstellung einer eigenen Roadmap für jede
Etage wird“ kann dieses Problem gelöst werden. [13] Die Genauigkeit des Systems
wird je nach genutztem Algorithmus, der die Messdaten mit den Referenzdaten
vergleicht, auf bis zu weniger als 3m angegeben.
2.2.3 VISUELLES TRACKING
Bei visuellem Tracking wird mit einer Kamera ein Bild aufgenommen und auf
bekannte Objekte untersucht. Diese Aufgabe ist sehr komplex, so dass zur
Vereinfachung künstliche Marker eingeführt wurden. Diese Marker haben
geometrische oder farbliche Eigenschaften und sind leicht in einem Videostream zu
identifizieren. [9] Daher gilt es beim visuellen Tracking zwischen dem Tracking mit
und ohne Nutzung künstlicher Marker zu unterscheiden.
Bei visuellem Tracking wird in zwei Schritten vorgegangen. Im ersten Schritt wird
das Bild bearbeitet, um die wesentlichen Informationen herauszufiltern und
anschließend wird in einem zweiten Schritt die Position ermittelt.[5] Das visuelle
Tracking ist dabei im Wesentlichen auf die verwendete Hardware angewiesen, da
die Qualität des Bildes von der Kamera direkten Einfluss auf das Ergebnis hat.
Farbtiefe, Rauschen und Verzerrungen beeinflussen die Fähigkeit des Trackers
enorm.
17Visuelles Tracking mit künstlichen Markern
Die Nutzung künstlicher Marker ist in der Augmented Reality weit verbreitet und
wird in absehbarer Zukunft auch noch nötig sein. Unter einem Marker versteht man
ein zwei- oder dreidimensionales Objekt, das durch seine Art und Form leicht durch
eine Kamera identifiziert (getrackt) werden kann. [5] Am meisten verbreitet sind
quadratisch geformte Marker, da man vier Punkte hat, welche in bekannter Relation
zu einander stehen, so dass hieraus leicht die Kamerakalibrierung mit einem einzigen
Marker bewerkstelligt werden kann.[19] Zhang und Navab führen im weiteren
verbreitete Marker an, von denen auch hier einige vorgestellt werden sollen:
• ATK-Marker des ARToolkits
• HOM-Marker des Hoffman Marker Systems
• IDG-Marker des Fraunhofer Institutes für graphische Datenverarbeitung
• SCR-Marker von Siemens Corporate Research
ATK-Marker
Das ARToolkit ist eine Softwarebibliothek zur Entwicklung von Augmented Reality
Anwendungen. [20] Sie wurde von Dr. Hirokazu Kato entwickelt. Bereitgestellt
wird Positions- und Orientierungstracking, Kamerakalibrierungscode und die
Erkennung von Markern, welche einen schwarzen Rand haben und quadratisch
sind. (siehe Abb. 7) Im Inneren befindet sich ein Muster. Dieses wird, mit in einer
Datenbank gespeicherten, Schablone abgeglichen.
Abb. 7 ATK-Marker der TU Dresden
18HOM-Marker
Der HOM-Marker wurde 1994 von C. Hoffman bei der Siemens AG für
Fotogrammetrie entwickelt. Das System diente später für Dokumentations- und
Wartungszwecke.[19] Um den Marker befindet sich noch ein Rahmen an dessen
rechter Seite sich 6 zusätzliche Bits befinden, um die Erkennung des Markers zu
verbessern. (siehe Abb. 8)
Abb. 8 HOM-Marker von Zhang und Navab[19]
IGD-Marker
Das Fraunhofer-Institut für Graphische Datenverarbeitung hat Marker entwickelt
für industrielle und touristische Zwecke. Im Rahmen des ARVIKA-Projektes [21],
einem vom Bundesministerium für Bildung und Forschung gefördertem Projekt,
wurden die Marker von den Partnern eingesetzt. Zielsetzung von ARVIKA und dem
Folgeprojekt ARTESAS[22] war der Einsatz von Augmented Reality für industrielle
Anwendungen wie Montage oder Entwicklung. Ein IGD-Marker ist ein in 6*6
kleinere Quadratstücke gleicher Größe unterteiltes Quadrat.(siehe Abb. 9) Die
inneren 4*4 Quadrate werden genutzt um Orientierung und Code des Markers zu
bestimmen. [19]
Abb. 9 IGD-Marker von Zhang und Navab[19]
19SCR-Marker
Siemens Corporate Research entwickelte diese Marker für Lokalisierung und
Tracking. Im Gegensatz zu den vorigen Markern werden statt Quadraten schwarze
Kreise in einer 8*8 Matrix dargestellt., welche auf weißem Grund gezeichnet sind.
(siehe Abb. 10)
Abb. 10 SCR-Marker von Zhang und Navab[19]
Weitere Marker
Neben den hier vorgestellten Markern, welche sich durch dicken schwarzen Rand
mit innerer Codierung auszeichneten, gibt es noch andere Modelle, wie z.B. Frame-
Markern. Dabei wird im Rahmen des quadratischen Markers codiert, so dass die
Innenfläche für andere Zwecke genutzt werden kann. Desweiteren gibt es Dot-
Marker. Hierbei werden Punkte über einem Bild verteilt. Es gibt keine Codierung
durch die Punkte, stattdessen werden Teilabschnitte des Bildes, welche durch die
Punkte gebildet werden, mit einem Bildvergleich analysiert.[5]
Visuelles Tracking ohne Marker
In einigen Fällen ist das Anbringen der Marker schwierig oder die Nutzung von
Markern schlicht unerwünscht. Dann muss versucht werden, Objekte nur anhand
des von der Kamera aufgenommenen Bildes zu identifizieren. Hierbei wird
ausgenutzt, dass oft einige in der Szene auftretende Elemente bekannt sind. Liegt
zum Beispiel ein 3D-Modell eines Objektes vor, kann auf dem 2D-Videobild eine
Mustersuche nach bekannten Schemen durchgeführt werden, um 2D-Orte mit 3D-
Orten zu assoziieren. [23] Hat man so ein Objekt gefunden, lässt sich dessen
20Orientierung und Position errechnen. Eine zweite Möglichkeit besteht darin, aus
den gewonnenen Daten die Position und Ausrichtung der Kamera zu bestimmen.
Anstatt vorgegebener 3D-Modelle lassen sich auch 2D-Daten verwenden. Diese
texturierten flachen Ziele dienen dazu ein Trainingsset zu erstellen. [23] Mit dessen
Hilfe können, nachdem das Bild auf Punkte, Kanten und Ecken untersucht wurde,
sechs Freiheitsgrade (Position und Orientierung) bestimmt werden.
Klein [24] nennt des weiteren Verfahren wie SLAM (Simultaneous Localization and
Mapping) und PTAM (Parallel Tracking and Mapping). Beide kommen völlig ohne
Vorkenntnisse aus. SLAM versucht, eine Karte zu erstellen und die eigene Position
zu berechnen. Dies ist ein ausgesprochen komplexer Vorgang, der viel
Rechenleistung benötigt und deswegen zur Zeit für mobile Endgeräte nur schwer
zu leisten ist. Bei PTAM wird die Umgebung aus verschiedenen Perspektiven
aufgezeichnet und versucht, daraus eine Lage innerhalb dieser Umgebung zu
ermitteln. [5] Beide Verfahren sind sehr anfällig für verschwommene und
unscharfe Bilder, was ihren Einsatz in Mobiltelefonen und ähnlichen Geräten
zusätzlich erschwert.
Markerbasiertes und markerloses Tracking lassen sich auch kombinieren. Bei
diesem inkrementelles Tracking genannten Vorgang wird davon ausgegangen,
dass sich um den Marker, der meist auf einer planen Fläche angebracht ist, noch
eine texturierte Fläche befindet. Solange der Marker sichtbar ist, wird dieser als
Grundwahrheit angenommen und markante Stellen, meist Features genannt, der
Umgebung werden erfasst. Aufgrund der Annahme, dass sie in der gleichen Ebene wie
der Marker liegen, kann ihre Position direkt berechnet werden. Sobald nun das
Tracking des Markers versagt, wird begonnen die Features des aktuellen Frames mit
denen des vorigen Frames mittels Schablonenabgleich zu vergleichen und das
inkrementelle Tracking beginnt. [25]
2.3 SOFTWAREFRAMEWORKS
Ein Überblick der im Augmented Reality Umfeld verwendeten Software soll hier
dargestellt werden. Da die Anwendungen im Bereich AR lange sehr spezifisch
21waren und von der jeweils verwendeten Hardware abhingen, war auch die
zugehörige Software meist dafür maßgeschneidert. Inzwischen haben sich aber
einige Produkte entwickelt, welche versuchen größere Bereiche abzudecken. Dabei
reicht die Spanne von größeren kommerziellen Suiten bis hin zu freiverfügbaren
Toolkits. Angelehnt an [5] soll hier ein Versuch einer kleinen Übersicht gegeben
werden.
Verglichen wurden in [5] die Produkte von Total Immersion [26], einer
französischen Firma, welche als Marktführer genannt wird, von Metaio [27], einer
deutschen Firma aus München, vom Fraunhofer IGD [28] und ARToolWorks [29]
aus Seattle. Die folgende Tabelle vergleicht die Angebote:
22Total ARTool
Beschreibung metaio IGD
Immersion Works
Realtime Bilderkennung Benutzung vorhandener Vorlagen zum Tracken X X X X
Erkennung
SW-Marker-Erkennung Dezidierte Marker müssen vorhanden sein X X X
Hand-Tracking Die Handbewegung wird als Marker erkannt X X
Interfaces (Motion Capturing, etc.) Übertragung humanoider Bewegungen X X
Pointing Detection Durch Verdecken bestimmter Flächenwerden Aktionen ausgelöst X X
Tracking Face Tracking Gesichter werden als Marker erkannt X X 2D X
Mimik Tracking Mimiken, Geschlecht und Alter werden erkannt X
Markerbased Tracking Für Low Budget Anwendungen X X X X
Markerless Tracking Für High Budget Anwendungen X X X X
High Quality Rendering Qualitativ hochwertige Darstellung der virtuellen Objekte X X X X
3D-Rendering
Physics Engine für nat. Interaktion Simulation natürlicher Reaktionen der Objekte untereinander X X
Sicherer Inhalt durch Encrypting Für sichere Kontenbehandlung X
Internet-Features
Video- und Audioaufzeichnung Zur Verarbeitung des Erlebten über Social Networks X X
Win X X X X
Mac X X X
Linux X X X
Betriebssysteme
Symbian X
Android X X
iPhone X X
Markerless Tracking X X
Flashanbindung Face Tracking
Sicherer Inhalt durch Encrypting X
Entwickler Tool X X X X
Preisstruktur Runtimelizenz X X X
Nutzerlizenz pro Anwendung X
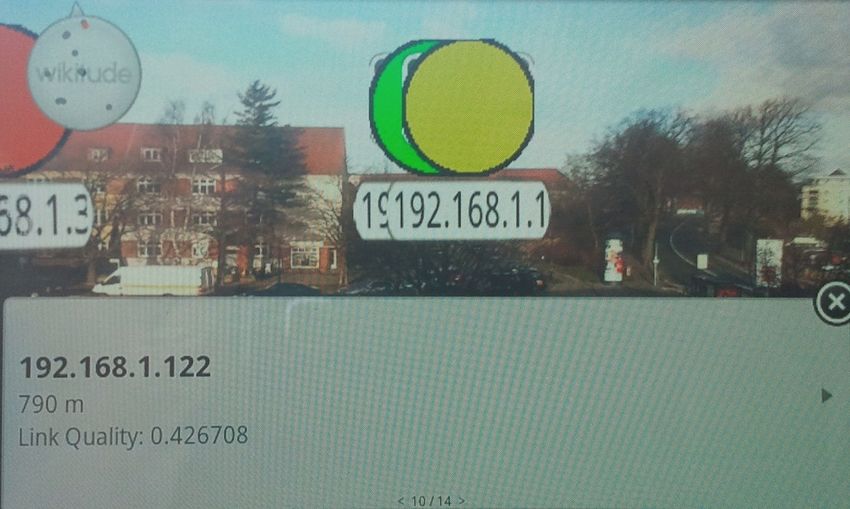
Tabelle 1.: Vergleich von Augmented Reality Software (A. Mehler-Bicher[5])2.4 AR-SOFTWARE FÜR SMARTPHONE'S Da im Rahmen dieser Arbeit eine Beispielsoftware für Smartphone's entwickelt werden soll, wird die Softwarelandschaft für diese Plattform etwas genauer betrachtet. Um Augmented Reality Anwendungen für mobile Geräte zu realisieren, gibt es mehrere Möglichleiten. Die aufwendigste ist dabei alles komplett selbst zu entwickeln. Dazu müsste man mittels der API des jeweiligen Betriebssystems alle nötigen Sensordaten auslesen. Hat man diese Daten vorliegen, müssen sie je nach Aufgabe der Anwendung nun mittels Tracking die eigene Position und Orientierung, sowie die der zu trackenden Objekte, bestimmen. Der Aufwand wäre offensichtlich enorm. Eine einfachere Variante wäre, eines der im Abschnitt Software vorgestellten Frameworks einzusetzen. Dort liegt Software zum Kalibrieren der Kamera, Tracking und Rendern der virtuellen Objekte bereits vor. Diese muss dann nach eigenen Vorstellungen in der Anwendung eingebunden werden. Der Aufwand hier ist schon wesentlich geringer. Für Anwendungen, die nicht so speziell sein müssen, gibt es bereits Softwarelösungen, welche es ermöglichen, mit einfachen Mitteln in das Kamerabild des Gerätes AR-Inhalte einzufügen. Diese Augmented Reality Browser bieten Overlays an mit gewissen Inhalten zur Umgebung. Je nachdem mit was man das Kamerabild erweitert haben möchte, wählt man ein Overlay, welches die Points of Interest (POI) genannten Inhalte einblendet. 2.4.1 BROWSER Als Vertreter der Gattung AR-Browser sollen hier Wikitude [30], Layar [31] und Junaio [32] vorgestellt werden. Es wird kurz auf Entstehungsgeschichte, Entwicklungsmethoden und Fähigkeiten der Browser eingegangen. 2.4.1 WIKITUDE WORLD BROWSER Wikitude ist seit den ersten Stunden von AR-Browsern auf dem Markt. Es wurde 2008 erstmals für Android Systeme vorgestellt. Inzwischen steht der Browser für
die Plattformen iPhone, Android, BlackBerry, Symbian und Bada zur Verfügung.
Die Inhalte für Wikitude werden Worlds genannt. Wikitude zeichnet sich durch die
Breite der Entwicklungsmöglichkeiten besonders aus, da Worlds auf verschiedene
Weisen erzeugt werden können. Eine einfache Möglichkeit wäre, die POIs in einem
der unterstützten XML-Derivate KML oder ARML zu speichern und bei Wikitude
hochzuladen.
Die generelle Architektur der meisten Browser sieht vor, dass sie selbst keine
Daten mitliefern, sondern nachdem der Nutzer gewählt hat, was er eingeblendet
haben möchte, von einem Webservice diese nachzuladen. So können vom Anbieter
die Daten aktuell gehalten werden und die Anwendung muss keine Datenbanken
mitliefern und pflegen. Als Datenaustauschformat kommt dabei meist ein XML-
Derivat zum Einsatz. Wikitude unterstützt dabei die folgenden zwei Formate.
Die Augmented-Reality-Markup-Language (ARML) ist ein XML-Schema, das von
der Wikitude GmbH (früher Mobilizy GmbH) vorgeschlagen wurde, als
Standardformat für AR-Inhalte. Innerhalb eines W3C Projektes wird ARML
weiterentwickelt. Gegenüber KML bietet ARML weitere Informationen zu den POIs,
um mehr Interaktivität zu ermöglichen. So können zum Beispiel Telefonnummern
und Webadressen hinterlegt werden.
Die Keyhole-Markup-Language (KML) ist ein XML-Schema das geographische
Informationen beschreibt. [2] Entwickelt wurde KML von der Keyhole Inc., welche
später von Google aufgekauft wurde. Inzwischen ist KML ein Standard des Open
Geospatial Consortium (OGC) und wird dort in Zusammenarbeit mit Google
gepflegt. KML soll nun stellvertretend für diese Datenformate etwas genauer
vorgestellt werden.
KML ist eine von XML erweiterte Sprache zur Beschreibung und Visualisierung von
geografischen Informationen und Inhalten. Solche Inhalte werden als Objekte
definiert, wobei verschiedene Typen wie Vektor- und Rasterdaten genutzt werden
können. Als Vektordaten können Placemarks dienen, die Punkte, Polygone oder
3D-Modelle mit geografischen Angaben referenzieren. Zu diesen Orten können
dann zusätzliche Informationen gespeichert werden, wie der Name des Ortes und
eine Beschreibung. Für Rasterdaten, wie Luft- oder Satellitenbilder, wird anstelle
der Geometriebeschreibung ein Koordinatenauschnitt zur Referenzierung
25angegeben. Als geodätisches Referenzsystem der Koordinaten dient das World
Geodetic System 1984 (WGS84). Für eine Koordinatenangabe werden also Längen-
und Breitengrad angegeben. Eine Höhenangabe über dem Referenzgeoid ist
ebenfalls als dritte Komponente der Koordinaten möglich. Hier ein Beispiel einer
sehr einfachen KML.
Rostock KTV
12.113665,54.089275,0.000000
KML wurde ursprünglich entwickelt, um geografische Daten in einem Programm
zu visualisieren, dass nach Firmenaufkauf als Google Earth veröffentlich wurde.
Mit dieser Software oder dem im Internet verfügbaren Google Maps lassen sich
schnell aus markierten Punkten KMLs generieren. So erstellte Karten interessanter
Punkte können direkt verwendet werden.
Da diese Daten zu Wikitude hochgeladen werden, handelt es sich bei diesem
Vorgehen um sehr statische Worlds. Möchte man mehr Kontrolle über die Inhalte,
um diese dynamisch zu halten und bei Bedarf zu ändern, kann man sie selber
hosten. Mittels Webservice können die Daten Wikitude dann zugänglich gemacht
werden. Sollte man volle Kontrolle wünschen, bietet Wikitude auch eine API, um
dessen Funktionalitäten den eigenen Anwendungen zugänglich zu machen.
Um die Leistungsfähigkeit von Wikitude zu demonstrieren, soll hier IBM Seer [33]
erwähnt sein. Diese App bietet AR-Inhalte rund um das Tennisturnier Wimbledon.
(siehe Abb. 11)
26Abb. 11 IBM Seer (nutzt Wikitude API)
2.4.2 LAYAR REALITY BROWSER
Der Browser Layar wird von der gleichnamigen aus den Niederlanden
stammenden Firma vertrieben und trat erstmals 2008 in Erscheinung. Nach
Angaben des Unternehmens ist er auf 10 Millionen Geräten installiert und wird
inzwischen schon auf vielen Geräten vorinstalliert mit ausgeliefert. Layar läuft auf
dem iPhone, Android, Symbian und Blackberry. Der Browser ist für Endnutzer frei
erhältlich. Das Erstellen von POI-Karten ist ebenso kostenfrei. Diese Overlays
werden bei Layar Layer genannt.
Das Produkt Layar Vision ermöglicht neben den POI-Karten eine Objekterkennung
durch Computer Vision. Dabei werden Objekte in einer Datenbank vorgehalten. Ein
Layer kann solche Objekte neben POIs einbinden und entsprechende
Augmentierungen wie 3D-Modelle, Audio- und Videoinhalte oder
Interaktionsmöglichkeiten einblenden. Für einen Treffer, also das erfolgreiche
Erkennen eines Objektes, ist ab einer gewissen Anzahl durch den Entwickler oder
Publisher des Layers ein Entgelt an Layar fällig. Das Preismodell wird in Tabelle 2
gezeigt:
27Erkannte Objekte pro Monat Nutzungsentgelt pro Monat
5.000 0€
10,000 0€
15.000 50€
100.000 900€
110.000 1000€
200.000 1000€
1.000.000 1000€
Tabelle 2 : Layar Vision Preistabelle (www.layar.com)
Entwickler eines Layers müssen den Inhalt selbst hosten. Die Daten werden von
Layar über einen Webservice abgerufen. Ein Vorgehen, um einen Layer zur
Verfügung zur stellen, sieht wie folgt aus. In einer SQL-Datenbank sammelt man
POIs. Wird der gewünschte Layer angefordert, sendet Layar einen Request an die
bei Layar für diesen Layer hinterlegte Adresse. Im Request sind verschiedene
Parameter codiert, wie die Position des Nutzers und ein Radius in dem er POIs
sucht. Ein PHP-Script kann diese Parameter extrahieren und aus der Datenbank in
der Nähe liegende POIs berechnen. Diese werden Layar dann als Antwort zurück
übermittelt.
Neben dieser Variante ist es auch möglich, mittels Layar Player Layer direkt in der
eigenen Anwendung anzeigen zu lassen, ohne den Browser von Layar nutzen zu
müssen. Es gibt dazu ein Toolkit, so dass nach Einfügen einiger Zeilen Code, die
Funktionalität in der eigenen App vorliegt. Zur Zeit der Entstehung dieser Arbeit
war dies nur für iPhone Apps möglich. Eine Version für Android soll folgen. Die
Nutzung des Players ist für Endnutzer kostenfrei. Für Entwickler entstehen nur
Kosten, wenn Layar Vision Inhalte genutzt werden, wobei das in Tabelle 2
angeführte Preismodell greift.
2.4.3 JUNAIO
Der Browser junaio ist etwas jünger als beiden vorher genannten und wurde Ende
2009 veröffentlicht. Die Firma Metaio entwickelt ihn, welche schon im Abschnitt
Software erwähnt wurde. Er ist für iPhones, iPads und Androidsysteme verfügbar.
Beim Start verstand sich junaio eher als AR Social Networking Browser, der es
ermöglichte mit Freunden 3D-Objekte und Szenen an gewissen Orten zu teilen.
Inzwischen ist daraus ein vollwertiger AR-Browser geworden. [2] Die verfügbaren
28Overlays, hier Channel genannt, sind oft auf die momentane Umgebung des
Nutzers beschränkt. Aufgrund der technologischen Erfahrungen von Metaio ist der
Browser zu Natural Feature Tracking in der Lage.
Um Inhalte bereit zustellen, müssen diese selbst gehostet werden. Junaio ruft dann
diesen Webservice auf, der für einen Channel hinterlegt wurde. Die Anforderungen
an diesen Webservice sind etwas spezieller, als bei den beiden vorher genannten
Browsern, da z.B. ein eindeutiger Schlüssel hinterlegt wird, damit junaio als
Sicherung den richtigen Webservice identifizieren kann. Mittels PHP-Skript wird
eine Callback-Funktion realisiert. Da dem Skript verschiedene Parameter
übergeben werden, kann dieses passende Inhalte suchen. Diese werden dazu in ein
spezielles XML-Schema formatiert, welches für junaio entwickelt wurde. Für reine
2D-POI-Karten sind Tags und Struktur KML und ARML sehr ähnlich. Neben der
Position lassen sich noch Extradaten wie Telefonnummer, E-Mailadresse und URL
hinterlegen. Junaio unterstützt auch 3D-Modelle samt Animation, wofür dann noch
eine Menge Tags zur Skalierung, Orientierung und Abspielverhalten
hinzukommen. Zusätzlich werden in diesem XML-Schema Tags geboten, welche
Distanzen für Objekte festlegen, ab denen diese angezeigt werden sollen. Sogar
nach Genauigkeit, der durch GPS ermitteln Position kann gefiltert werden, ob ein
Objekt eingeblendet werden soll, um Irritationen durch zu große Abweichungen zu
vermeiden.
3 KONZEPTION
Das Ziel des Softwareteils dieser Arbeit soll eine Augmented Reality Anwendung
sein, die auf einem Smartphone läuft und dessen Kamera und Display wie bei der
HUD-Technik (siehe Absatz 2.1.3) einsetzt, um ein WLAN und dessen
Knotenqualität zu visualisieren. Ein Anwendungsfall wäre die Wartung bzw. der
Ausbau eines Netzes. Dabei könnte vor Ort bei der Installation einer Richtantenne
das Netz visualisiert werden, um die Ausrichtung zu verbessern oder zu
überprüfen. Ein großes und somit auch potentiell interessantes WLAN für diese
29Art Software wird in Rostock vom Verein Opennet Initiative e.V.[34] betrieben. Das
Anliegen des Vereins und das Netz sollen im folgenden kurz vorgestellt werden.
3.1 DIE OPENNET INITIATIVE
Da 2004 noch nicht in allen Stadtteilen Rostocks DSL verfügbar war, wurde
überlegt, wie man dort Haushalte mit anbinden könnte. Zu dieser Zeit waren
verschiedene Techniken zur drahtlosen Datenübertragung verfügbar, so dass eine
Nutzung dieser zum Anschluss der Haushalte an einen DSL-verbundenen
Endpunkt erörtert wurden. Interessenten wurden schnell gefunden und mit Hilfe
von Mitarbeitern des Lehrstuhls für Informations- und Kommunikationsdienste
der Rostocker Universität wurde ein Machbarkeitstest erfolgreich umgesetzt. Die
Kosten für den Netzzugang sollten auf die nutzenden Mitglieder verteilt werden. So
entstand der Verein "Opennet Initiative" Anfang 2005. Jetzt gegen Ende 2011 misst
das Netz über 160 Teilnehmer.
Abb. 12 Ausschnitt der aktuellen OpenNET Karte des Entstehungsgebietes Rostocker KTV
30Technisch handelt es sich beim Opennet um ein WLAN, das im Ad-Hoc-Modus
betrieben wird und Optimized Link State Routing (OLSR) als Routingprotokoll
einsetzt. Ad-Hoc-Netze ermöglichen es, Knoten dynamisch einzugliedern oder den
Ausfall eines Knotens zu kompensieren, indem neue Routen um den ausgefallenen
Knoten gesucht werden. Die Daten werden dabei von Knoten zu Knoten gereicht,
bis sie beim Empfänger eintreffen. Die Topologie des Netzes muss dabei jedem
Knoten bekannt sein. Um dies zu gewährleisten, senden die Knoten zwei Arten von
Nachrichten aus. Die HELLO-Nachrichten dienen dazu benachbarte Knoten, die ein
oder zwei Hops entfernt sind, zu ermitteln. Die zweite Art heißt Topology-Control-
Nachrichten, welche zur Verbreitung der so gewonnen Informationen dienen. Die
beste Route ist im normalen OLSR dabei jene, die die wenigsten Hops benötigt. Bei
Funknetzen hängt die Qualität allerdings stark von der Signalstärke zwischen zwei
Knoten ab. Die Qualität wird daran gemessen, wie viel Paketverlust auftritt und
Link Quality (LQ) genannt. Dabei wird direkt aus der Differenz der gesendeten und
empfangenen Pakete ein prozentualer Wert ermittelt. Die LQ soll später in der
Software ebenfalls visualisiert werden.
Die Opennet Initiative veröffentlich in regelmäßigen Abständen von 5 Minuten den
aktuellen Netzstatus in verschiedenen Datenformaten. Hieraus soll die
Datengrundlage für die Software erstellt werden.
3.2 ARCHITEKTUR
Als erste Idee stellt sich natürlich eine Applikation, die eben vorher genannte Ziele
umsetzt. Als ungünstig erweist sich dabei, allerdings die Forderung die
Netzhistorie auch darstellen zu können. Dazu müsste die Anwendung alle 5
Minuten eine Netzverbindung aufbauen, um den aktuellen Status zu speichern. Das
würde einen konstanten Traffic für das Telefon bedeuten und den Speicher enorm
belasten. Hinzu kommt, dass nur Daten erfasst würden, die seit dem Zeitpunkt der
Installation der Software auf dem Telefon angefallen sind. Da die vorgestellten
Browser mit datenvorhaltenden Webservices arbeiten, entschied ich mich
ebenfalls dafür. Die zu entwickelnde Software unterteilt sich damit in die zwei
Hauptbestandteile Webservice und Telefonapplikation (App).
31Zur Verdeutlichung der Architektur soll folgende Darstellung dienen:
Opennet Server
Aktuelle Netzdaten
Periodischer
KML-Download
Server
XSL Transformation
XML Datenbasis
Webservice
PHP-Skripte zur
Bearbeitung der
Requests
Response mit HTTP-Request
XML-Datensatz mit Timestamp
App
Zeitauswahl
AR-Ansicht
323.2.1 DIE APP
Die Entwicklung einer Augmented Reality Anwendung umfasst eine Vielzahl an
Aufgaben. Gerade die Auswertung der Sensordaten und das Echtzeitrendering in
den Videostream der Kamera schien an Aufwand den Rahmen zu sprengen. Daher
sollte, um nicht bei null zu beginnen, eine Bibliothek oder ein Framework genutzt
werden. Die AR-Browser sind bereits speziell für Smartphone’s angepasst und
bieten alle ein Software Development Kit (SDK) um deren Funktionalität in eigene
Anwendungen zu integrieren. Begrenzungen gibt es hier allerdings zum Beispiel
bei den unterstützten Plattformen, welche die verfügbare Programmiersprache
festlegt. Zur Auswahl standen hier iOS- und Android-basierte Telefone. Für das
iPhone wird für native Anwendungen Objective-C genutzt, welches dem Autor
weniger geläufig ist, als das auf Android genutzte Java, wodurch die Wahl hier zu
Gunsten des Letzteren ausfiel. Zum Zeitpunkt der Erstellung dieser Arbeit, wurde
für Layar nur ein iPhone SDK bereitgestellt, wodurch dieses ausschied. Zwischen
Wikitude SDK und dem metaio mobile SDK (junaio) fiel die Wahl auf Wikitude, da
dort ein klares Interface zum Erstellen von POIs angeboten wird und die nötigen
Anpassungen in der Anzeige zum Darstellen der Qualitätsinformationen einfach
schien.
Der typische Nutzungsablauf soll dabei folgendermaßen aussehen. Man wählt nach
dem Start der Anwendung das Datum und die Zeit aus für die der Netzstatus
angezeigt werden soll und startet die AR-Ansicht, in welcher im Kamerabild die
POIs eingefügt sind. Aus Datum und Uhrzeit wird in der App der Timestamp
berechnet und mit diesem einen Aufruf an den Server geschickt. Dieser sendet
daraufhin als Antwort eine einfache XML zurück in der der jeweilige Netzstatus
abgebildet ist. Nachdem die Antwort geparst wurde, wird daraus eine Liste der
Points of Interest erstellt, welche an die Wikitude Bibliothek übergeben wird, von
welcher nun die AR-Ansicht mit dem entsprechenden Inhalt startbar ist. In der AR-
Ansicht werden die Access Points (AP) mit Kreisen dargestellt, die je nach LQ
unterschiedlich eingefärbt sind.
333.2.2 DER WEBSERVICE
Der Webservice erfüllt im Wesentlichen 3 Aufgaben. Er bezieht periodisch die
neusten Daten vom Server der Opennet Initiative. Diese Daten werden dann in das
später an die App zu versendende XML-Format transformiert. Und ein Webservice
wird gestellt, an dem die eingehenden Requests verarbeitet werden.
Die aktuellen Netzdaten werden von der Opennet Initiative alle 5 Minuten in den
Formaten KML, PNG und JPEG veröffentlicht. Zur automatischen
Weiterverarbeitung eignet sich davon nur KML. Dieses Format wurde bereits
etwas detaillierter vorgestellt. Das KML-Format ist relativ komplex und in den
bereitgestellten Dateien finden sich zahlreiche überflüssige Informationen. Um den
Parser später kompakt und schnell umzusetzen, entschied ich mich dafür, die KML
in ein eigenes XML-Format zu transformieren. Um ein XML-Dokument in ein
anderes XML-Dokument umzuwandeln, bietet sich XSL Transformation (XSLT)
[35] an. XSLT steht hierbei für EXtensible Stylesheet Language Transformations
und ist eine Programmiersprache zur Transformation von XML-Dokumenten.
Während die Eingabe immer XML-Dokumente sind, kann das Zielformat beliebig
sein. Der Ablauf sieht dabei vor, dass anhand von Regeln für bestimmte Muster
innerhalb der Baumstruktur des Quelldokuments, im Zieldokument eine
bestimmte Ausgabe erfolgt.
Für diese Anwendung bedeutet dies, dass XSLT einmal als Filter zum Einsatz
kommt und für überflüssige Teile keine Ausgabe erzeugt wird. Von der
bereitgestellten KML wird etwa nur ein Drittel der Daten benötigt. Zusätzlich wird
die vorige Baumstruktur verworfen und eine neue schlankere, konkret eine
weniger tief verschachtelte, erstellt in der die für die POIs notwendigen Daten
eingegliedert werden. Die so erzeugten XML-Dateien werden mit einem
Timestamp benannt, um später mit wenig Aufwand die für die Anfrage zeitlich am
nächsten gelegenen Daten zu finden.
Für den letzten Schritt wird ein Webserver aufgesetzt. Ein Webserver dient dazu
Dokumente und andere Daten in Netzwerken bereit zu stellen. Dabei lauscht der
Server auf einem Port auf Anfragen. Die Auswahl an Lösungen ist hier groß, aber es
gibt mit dem Apache HTTP Server auch einen Quasistandard, da dieser Server der
34Sie können auch lesen

















































