BACHELORARBEIT - Industrie 4.0 Die Entwicklung der Robotik und ihre Auswirkung auf zukünftige Arbeitsplätze (an Beispiel Medizinroboter) ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
BACHELORARBEIT
Frau ➢
Tamana Omari ➢
Industrie 4.0
–
Die Entwicklung der Robotik
und ihre Auswirkung auf
zukünftige Arbeitsplätze
(an Beispiel Medizinroboter)
Mittweida, 2018
Fakultät: Wirtschaftsingenieurwesen
BACHELORARBEIT
Industrie 4.0
–
Die Entwicklung der Robotik
und ihre Auswirkung auf
zukünftige Arbeitsplätze
(an Beispiel Medizinroboter)
Autor:
Frau Tamana Omari
Studiengang:
Betriebswirtschaft
Seminargruppe:
BW13w3-B
Erstprüfer:
Prof. Dr. rer. nat. Thoralf Gebel
Zweitprüfer:
Prof. Dr. rer. oec. Serge Velesco
Einreichung:
Mittweida, 04.10.2018
Faculty of economic engineering
BACHELOR THESIS
Industry 4.0
–
The development of robotics
and its influence on future
workplaces
(on example: medical robots)
author:
Ms. Tamana Omari
course of studies:
Business Administration
seminar group:
BW13w3-B
first examiner:
Prof. Dr. rer. nat. Thoralf Gebel
second examiner:
Prof. Dr. rer. oec. Serge Velesco
submission:
Mittweida,04.10.2018
Bibliografische Beschreibung: Name, Vorname: Omari, Tamana Industrie 4.0 - Die Entwicklung der Robotik und ihre Auswirkung auf zukünftige Arbeitsplätze (an Beispiel Medizinroboter) Industry 4.0 - The development of robotics and its influence on future workplaces (on example: medical robots) 55 Seiten, Hochschule Mittweida, University of Applied Sciences, Fakultät Wirtschafstingenuierwesen, Bachelorarbeit, 2018 Referat: Industrie 4.0-Die Entwicklung der Robotik und ihre Auswirkung auf die zukünftige Arbeitsplätze (am Beispiel von Medizinrobotern). Das Ziel der Arbeit bestand darin zu untersuchen, welche Eigenschaften und Voraussetzungen müssen die Roboter besitzen, damit sie im Krankenhaus das Personal ersetzen können. Dieses Phänomen wurde auf theoretischer Grundlage untersucht. Dabei wurde ein Einblick in die Industrie 4.0 gegeben und darauffolgend die Robotik in der Medizin dargestellt. Zum Schluss erfolgte ein Vergleich zwischen Roboter und Medizinpersonal. Trotz der raschen digitalen Entwicklung können die Roboter das Personal nicht komplett ersetzen. Vor allem ist eine Prognose für den Pfle- gebereich möglich, da dieser in Zukunft auf die Unterstützung von Robotern zu- rückgreifen und daher kein Mangel an Pflegepersonal bestehen wird.

Inhaltsverzeichnis I
Inhaltsverzeichnis
Inhaltsverzeichnis .......................................................................................................... I
Abbildungsverzeichnis ................................................................................................ III
Tabellenverzeichnis ...................................................................................................... V
1 Einleitung ....................................................................................................... 1
1.1 Problemstellung /Motivation ............................................................................ 1
1.2 Zielsetzung ...................................................................................................... 2
1.3 Vorgehensweise .............................................................................................. 2
2 Industrie 4.0 ................................................................................................... 3
2.1 Definition ......................................................................................................... 3
2.2 Industrielle Revolution ab 1784 bis heute ........................................................ 4
2.3 Arbeit 4.0 als Folge von Industrie 4.0 .............................................................. 7
2.4 Neue Technologien ......................................................................................... 9
2.4.1 Big Data .............................................................................................. 9
2.4.2 Internet of Things .............................................................................. 10
2.4.3 3D-Druck ........................................................................................... 10
2.4.4 Virtual & Augmented Reality ............................................................. 11
2.4.5 Drohnen ............................................................................................ 13
3 Robotik in der Medizin ................................................................................ 14
3.1 Definition von Robotern ................................................................................. 14
3.2 Geschichte .................................................................................................... 15
3.3 Roboterarten ................................................................................................. 16
3.3.1 Serviceroboter................................................................................... 16
3.3.1.1 Serviceroboter für Pflege .................................................... 17
3.3.1.2 Rehabilitationsroboter ......................................................... 23
3.3.1.3 Reinigungsroboter .............................................................. 26
3.3.2 Humanoide Roboter .......................................................................... 28
3.3.3 Medizinroboter .................................................................................. 32
3.3.4 Soziale Robotik ................................................................................. 36
4 Arbeitsplatze in der Medizin ....................................................................... 38
4.1 Personal ........................................................................................................ 38
4.1.1 Arzt ................................................................................................... 38
4.1.1.1 Arbeitsleistung .................................................................... 38
4.1.1.2 Qualifikation ........................................................................ 39
4.1.1.3 Arbeitszeit ........................................................................... 40
4.1.1.4 Arbeitsentgelt ...................................................................... 40
4.1.2 Pflege................................................................................................ 41
II Inhaltsverzeichnis
4.1.2.1 Arbeitsleistung .................................................................... 41
4.1.2.2 Qualifikation ....................................................................... 42
4.1.2.3 Arbeitszeit .......................................................................... 43
4.1.2.4 Arbeitsentgelt ..................................................................... 43
4.1.3 Service ............................................................................................. 44
4.1.3.1 Arbeitsleistung .................................................................... 44
4.1.3.2 Qualifikation, Arbeitszeit und Arbeitsentgelt ........................ 45
4.1.4 Verwaltung........................................................................................ 45
4.1.4.1 Arbeitsleistung .................................................................... 45
4.1.4.2 Qualifikation ....................................................................... 46
4.1.4.3 Arbeitszeit und Arbeitsentgelt ............................................. 46
5 Vergleich Roboter mit der Medizinpersonal .............................................. 47
5.1 Roboter im Überblick..................................................................................... 47
5.2 Einsatzgebiete der verschiedenen Roboterarten ........................................... 48
5.3 Möglichkeit der Ersetzung ............................................................................. 50
5.3.1 Mögliche Ersetzung der Roboter in Krankenhaus Personals ............ 50
5.3.2 Vor- und Nachteile der Roboter in Krankenhaus Personals .............. 55
5.3.3 Anteil und Skizzen Darstellung der Roboter in Krankenhaus ............ 56
6 Zusammenfassung und Ausblick .............................................................. 57
7 Literaturverzeichnis .................................................................................... 60
Selbstständigkeitserklärung ...................................................................................... 65
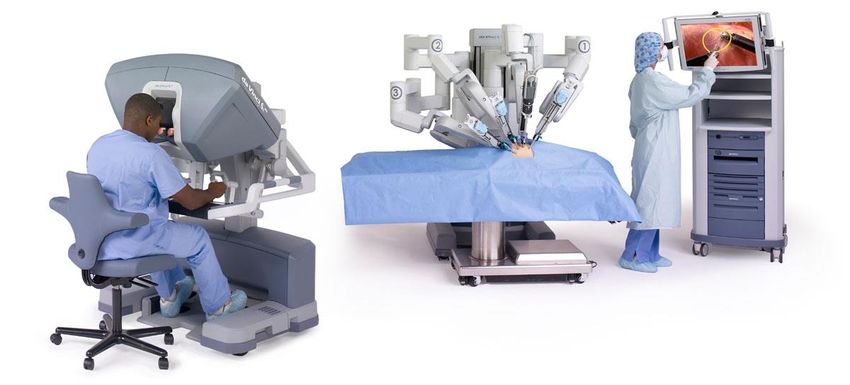
Abbildungsverzeichnis III Abbildungsverzeichnis Abbildung 1: erste industrielle Revolution ......................................................................... 4 Abbildung 2: zweite industrielle Revolution ........................................................................ 5 Abbildung 3: dritte industrielle Revolution .......................................................................... 6 Abbildung 4 viertet industrielle Revolution ......................................................................... 7 Abbildung 5: VR und AR ................................................................................................. 12 Abbildung 6 Typische Konfiguration eines Industrieroboters ........................................... 14 Abbildung 7: Serviceroboter Arten ................................................................................... 17 Abbildung 8: CASERO, (WiMi Care, MLR System GmbH) .............................................. 18 Abbildung 9 : Care-O-Bot 3 – Praxistest im Altenheim .................................................... 19 Abbildung 10: Care-O-Bot 4 – Pflege Unterstützung und ein echter Gentleman .............. 19 Abbildung 11: Robear (Bärenroboter) 2015 .................................................................... 20 Abbildung 12: Automatische japanische Seniorendusche HIRB ..................................... 21 Abbildung 13: Poseidon Hygienroboter ........................................................................... 22 Abbildung 14: Exoskelett ................................................................................................. 24 Abbildung 15: Serviceroboter „Roreas“............................................................................ 26 Abbildung 16: Jimmy meets Spohia the Human-Like Robot ............................................ 28 Abbildung 17: ASIMO von Honda .................................................................................... 29 Abbildung 18: Pepper Roboter ........................................................................................ 30 Abbildung 19: Humaniode Zora Roboter ......................................................................... 31 Abbildung 20: DA Vinci Roboter ..................................................................................... 33 Abbildung 21: Mazor X Robotic ....................................................................................... 34

IV Abbildungsverzeichnis Abbildung 22: CyberKnife Roboter .................................................................................. 35 Abbildung 23: Roboterrobbe ........................................................................................... 36 Abbildung 24: Roboter- Robbe ........................................................................................ 37 Abbildung 25: Mögliche Zulassungsvoraussetzungen des Pflegestudiums ..................... 43 Abbildung 26: Organigramm Roboterarten ...................................................................... 48
Tabellenverzeichnis V Tabellenverzeichnis Tabelle 1: Geschichtliche Entwicklung............................................................................. 15 Tabelle 2: Einsatzgebiete Roboterarten........................................................................... 49 Tabelle 3: Mögliche Ersetzung der Roboter in Krankenhaus (Eigene Darstellung) .......... 51 Tabelle 4: Vor- und Nachteile der Roboter in Krankenhaus (Eigene Darstellung) ............ 52 Tabelle 5: Anteil und Darstellung der Roboter in Krankenhaus ( Eigene Darstellung)..... 53

Einleitung 1 1 Einleitung 1.1 Problemstellung /Motivation Im Zeitalter der Digitalisierung ist es schwierig bis unmöglich, sich ihr zu verschlie- ßen; ständig ist die Rede von 3D-Druckern, Robotern, selbstfahrenden Autos und so weiter. Dabei ist es unwahrscheinlich, dass wir in der vierten industriellen Revo- lution stehen bleiben. Demzufolge werden von den zukünftigen Arbeitsplätzen auch neue Tätigkeiten mit neuen Anforderungen verlangt werden. Am 02.02.2018 wurde in vielen Nachrichten (Spiegelonline, Frankfurter Zeitung etc.) gemeldet, dass – laut einem Forschungsbericht von „Bitkom“ zur weiteren Arbeits(markt)entwicklung – in den nächsten fünf Jahren in Deutschland 3,4 Millionen Stellen durch Digitalisierung wegfallen werden. 1 Der IT-Verband “Bitkom“ hat am 28.November 2017 eine Umfrage mit 502 Unter- nehmen durchgeführt. Laut Bitkom werden durch die Digitalisierung 3,4 Millionen Jobs gestrichen, da Roboter menschliche Arbeitskräfte ersetzen werden. Davon sind auch Arbeitsplätze in Banken, Versicherungen sowie der Chemie- und Phar- mabranche betroffen. Dem widersprach allerdings der Deutsche Industrie- und Han- delskammertag (DIHK): Durch die Digitalisierung gehe Deutschland nicht die Arbeit aus, sondern es entstünden viele neue Arbeitsplätze. 2 In meiner Arbeit versuche ich die besondere Rolle des aktuellen Trends beschleu- nigter Digitalisierung darzustellen. Jeder Mensch ist gezwungen, sich an die rasche Beschleunigung anzupassen. Diejenigen, die sich nicht anpassen, werden mit der Zeit aus dem gesellschaftlichen System ausgeschlossen. Somit wandelt und gestal- tet die Digitalisierung unsere Wirtschaft und Gesellschaft grundlegend um, denn sie hat einen großen Einfluss auf unsere Arbeit und unser Alltagsleben. Dabei ist jeder Betrieb davon betroffen: von kleinen Handwerksbetrieben bis hin zum großen In- dustriebetrieb. Daher fragen wir uns mit Blick auf die zukünftige Entwicklung: Wie 1 Vgl. (schareika 2018) 2 Vgl. (Achim Berg 2017)
2 Einleitung gehen wir mit dem Wandlungsprozess der Digitalisierung um und welche Gestal- tungsmöglichkeiten verwirklichen wir? Dabei wird ein Fokus gelegt auf den Ver- gleich der heutigen Gesellschaft und eine Prognose zur zukünftigen Digitalisierung gegeben. Mit der Globalisierung ist die Vernetzung von fast allem und jedem über das Internet möglich. Die Forschungsfrage lautet demzufolgen: „Industrie 4.0 – Die Entwicklung der Robotik und ihre Auswirkung auf zukünftige Arbeitsplätze (am Beispiel Medizin- roboter)“. In meiner Bachelorarbeit möchte ich die Anwendung der Roboter vor al- lem in der Medizintechnik untersuchen. 1.2 Zielsetzung Welche Voraussetzungen und Eigenschaften müssen die Roboter besitzen, damit sie im Krankenhaus das Personal ersetzen können? 1.3 Vorgehensweise Am Anfang werden die vier industriellen Revolutionen dargestellt und die neues-ten Entwicklungen der Industrie 4.0 vorgestellt. Als nächstes gehe ich auf die Robotik in der Medizin ein und stelle die entsprechenden Verwendungsarten der Robotik vor. Anschließend wird der Arbeitsplatz in der Medizin dargestellt, welche sich in Krankenhauspersonal (Arzt, Pflege, Service und Verwaltung) unterteilt. Dabei wird ein Blick auf Arbeitsleistung, Qualifikation, Arbeitszeit und Arbeitsentgelt geworfen. Danach werden die Roboter mit dem Medizinpersonal verglichen, inwieweit die Ro- boter das Medizinpersonal ersetzen können, und welche Vor- und Nachteile sie mit sich bringen. Zum Schluss erfolgen die Zusammenfassung, das Fazit und der Aus- blick der Bachelorarbeit. Die Forschungsfrage wurde auf Literaturbasis untersucht.
Industrie 4.0 3 2 Industrie 4.0 In diesem Kapitel wird folgendes vorgestellt: Zuerst wird der Begriff der industriellen Revolution definiert. Danach wird die industrielle Revolution ab 1784 bis heute in einzelnen Etappen vorgestellt. Zum Schluss werden neue Technologien, die für die vierte industrielle Revolution charakteristisch sind, näher erläutert. 2.1 Definition Der Begriff „ Industrie 4.0“ wurde zum ersten Mal im April 2011 auf der Hannover Messe, durch drei Vertreter aus Wirtschaft, Politik und Wissenschaft (Henning Ka- germann, Wolf-Dieter Lukas und Wolfgang Wahlster) bekannt gemacht.3 „Das Grün- buch - Arbeit weiter Denken von Bundesministerium für Arbeit und Soziales“ be- schreibt die Definition der Industrie 4.0 wie folgt: „Das Schlagwort Industrie 4.0 be- schreibt einen Umbruch im produzierenden Sektor. Leitbild der Industrie 4.0 ist eine hochautomatisierte und vernetzte industrielle Produktions- und Logistikkette. Dabei verschmelzen virtuelle und reale Prozesse auf der Basis sogenannter cyberphysi- scher Systeme. Dies ermöglicht eine hocheffiziente und hochflexible Produktion, die die Kundenwünsche in Echtzeit integriert und eine Vielzahl von Produktvarianten ermöglicht.“4 3 Vgl. (Kagermann und Lukas 2011). 4 (Bundesministerium für Arbeit und Soziales 2015, 87)
4 Industrie 4.0
2.2 Industrielle Revolution ab 1784 bis heute
Den Zeitraum der ersten industriellen Revolution kann man von 1784 bis 1826 an-
setzen. Dabei wurde die mechanische Handwerkproduktion durch die maschinelle
Produktion (Abbildung 1) ersetzt. Erfindungen wie Wasser- und Dampfkraft, die me-
chanische Webmaschine, die Eisenbahn und der Fotoapparat sind die bedeutsams-
ten technischen Entwicklungen dieser Zeit.5
Abbildung 1: erste industrielle Revolution 6
Die zweite industrielle Revolution erfolgte von 1870 bis 1968. Dabei wurden die ar-
beitsteilige Massenproduktion sowie standardisierte Arbeitsprozesse (Abbildung 2)
eingeführt. Die wichtigen Fortschritte dieser Zeit waren die Glühbirne, das Telefon,
das Fließband und der Mikroprozessor.7
5 Vgl. (Die vierte industrielle Revolution | Swisscom 2018).
6 Eigene Darstellung in Anlehnung an (Die vierte industrielle Revolution | Swisscom 2018).
7 Vgl. (Die vierte industrielle Revolution | Swisscom 2018).Industrie 4.0 5
Abbildung 2: zweite industrielle Revolution8
Anschließend fand die dritte industrielle Revolution von 1969 bis 2009 statt. Hierbei
wurden die Elektronik und IT zur Automatisierung der Produktion leistungsfähig (Ab-
bildung 3) gemacht. So entstanden RFID, Handy, WWW, GPS, NATELD, Skype,
Facebook, Twitter, YouTube und WhatsApp. Wo die erste industrielle Revolution
sehr viel Zeit benötigt hatte, um Veränderungen durchzusetzen, ist bei der zweiten
und dritten Revolution zu sehen, dass sich der Umgang mit der Veränderung selbst
geändert hat: Menschen sind (diesbezüglich) flexibler geworden und haben sich nun
jeweils schneller angepasst.9
8 Eigene Darstellung in Ablehnung an (Die vierte industrielle Revolution | Swisscom 2018)
9 Vgl. (Die vierte industrielle Revolution | Swisscom 2018).6 Industrie 4.0
Abbildung 3: dritte industrielle Revolution10
Bei der vierten industrielle Revolution wird heute von der ,,Ära der Sensorik und der
weltweiten Vernetzung’’ von intelligenten Gegenständen (Abbildung 4) gesprochen.
Es wird behauptet, dass alles mit allem vernetzt sei. Die vierte industrielle Revolu-
tion befasst sich mit der Verschmelzung von virtueller und realer Welt. Durch die
starke Vernetzung entstehen gigantische Datenmengen. Dabei übernehmen intelli-
genten Maschinen allerdings auch nach und nach unsere Denkarbeit. Die Entwick-
lung ist so weit fortgeschritten, dass OP-Roboter den Operationssaal übernehmen
(können). Da die Menschen bei bestimmten Operationen nicht in der Lage sind, ihre
Gefühle zu kontrollieren, wurden Roboter entwickelt, die in dieser Situation „rei-
bungslos“ funktionieren. Der Begriff Internet der Dinge (IdD) (englisch Internet of
Things, Kurzform: IoT) beschreibt, dass der (Personal) Computer zunehmend als
Gerät verschwindet und durch „intelligente Gegenstände“ ersetzt wird. Statt – wie
derzeit – selbst Gegenstand der menschlichen Aufmerksamkeit zu sein, soll das
10 Eigene Darstellung in Ablehnung an (Die vierte industrielle Revolution | Swisscom 2018)Industrie 4.0 7
„Internet der Dinge“ den Menschen bei seinen Tätigkeiten unmerklich unterstüt-
zen.11
Abbildung 4 viertet industrielle Revolution12
2.3 Arbeit 4.0 als Folge von Industrie 4.0
Arbeiten 1.0 bis 2.0
Mit der Einführung der mechanischen Produktionsanlagen der ersten industriellen
Revolution und Massenproduktion in die zweite industriellen Revolution erfolgten
Veränderungen in der Organisation von Arbeit, in den entsprechenden Gesell-
schaftsstrukturen und sich herausbildenden Klassen.13 Hier spielte die Steuerung
mit der Hand eine große Rolle, zum Beispiel wurden (und werden noch) Bohrma-
schinen oder Röntgengeräte mit der menschlichen Hand gesteuert. Allerdings war
11 Vgl. (Die vierte industrielle Revolution | Swisscom 2018).
12 Eigene Darstellung in Ablehnung an (Die vierte industrielle Revolution | Swisscom 2018)
13Vgl. (Bundesministerium für Arbeit und Soziales 2015, 34)8 Industrie 4.0 diese Informationstechnik (IT) nicht komplex (wie zum Beispiel Telefon oder Kopier- geräte), da bei ersteren der Mensch nur indirekt beschäftigt war (und ist). 14 Arbeiten 3.0 Bei dieser Arbeitsform entstand die soziale Marktwirtschaft, die wirtschaftliche Frei- heit mit sozialem Ausgleich verbindet. Hauptaufgabe des Staates war, freien und fairen Wettbewerb ohne Sonderrechte zu gewährleisten. Darüber hinaus sichert der Staat allen Bürgern durch die Umverteilung eine Gleichberechtigung zu. Die Soziale Marktwirtschaft bringt mit der Kombination von Freiheit, Wettbewerb, Eigentum, Haftung tendenziell Wohlstand für alle. Durch die Automatisierung kommt es unter anderem zur Ausweitung des Dienstleistungssektors über regionale und nationale Grenzen hinaus, demzufolge kam die Globalisierung der Märkte.15 Die Zeit um- fasste indirekt gesteuerte Technologien:“ z.B. CNC-Maschinen, Industrieroboter o- der verfahrenstechnische Anlagen. Bei diesen Arbeitsmitteln übernimmt die Technik einen Großteil der Arbeit.“16 Die IT wurde komplexer, die Computer, elektronische Kassen oder CAD-Systeme brauchten mehr Verständlichkeit, demzufolge wurde zum Großteil die Arbeit durch die Technik ersetzt. Das heißt der Mensch war nur zum Teil selbst tätig.17 Arbeiten 4.0 Die Arbeit 4.0 umfasst selbststeuernde und IT- integrierte Techniken wie Smart Factories oder Internetplattformen (Amazon, online Shop, Ebay und….). Dies be- deutet wiederum, dass die Technik in der Lage ist, die Arbeitsprozesse ohne menschliche Tätigkeit allein und automatisch zu erledigen. Das Bundesministerium für Arbeit und Soziales schreibt 2015 in seinem Buch (Grünbuch Arbeiten 4.0): „Wie 14 Vgl. (Arntz, Gregory und Zierahn 2018, 17) 15 Vgl. (Bundesministerium für Arbeit und Soziales 2015, 35) 16 (Arntz, Gregory und Zierahn 2018) 17 Vgl. (Bundesministerium für Arbeit und Soziales 2015, 35)
Industrie 4.0 9 die zukünftige Arbeitswelt im Einzelnen aussehen wird, ist noch offen.“18 Der stän- dige Wandel der Herstellung führte zu einer wachsenden Vernetzung, welche die Zusammenarbeit von Mensch und Maschine änderte. Demzufolge bringt die Verän- derung der Herstellungsweise neue Produkte und Dienstleistungen mit sich. Mit den kulturellen und gesellschaftlichen Veränderungen wurden auch mehr Innovationen in der Arbeit gefordert. Noch ist offen, welche Auswirkungen diese Entwicklungen auf Arbeit und soziale Sicherungen letztendlich haben werden; anhand von Gesell- schafts- und Politikanalysen wird dies versucht zu systematisieren.19 2.4 Neue Technologien Zur Industrie 4.0 gehören sicherlich auch die bedeutsamsten neuen Technologien wie zum Beispiel Big Data, Internet of Things (Internet der Dinge), Robotik, 3D-Dru- cker, Virtual & Reality, künstliche Intelligenz und Drohnen. Vor ca. 50 Jahren gab es schon die ersten Roboter am Fließband, Big Data gab es auch schon vor zehn Jahren. Trotzdem gehören diese Technologien heute zur Industrie 4.0 und damit zu den Technologien, die in Zukunft eine entscheidende Rolle spielen werden.20 In den nächsten Abschnitten werden die neuen Technologien kurz erklärt sowie die ent- sprechenden Anwendungsbereiche benannt. 2.4.1 Big Data Beim Big Data handelt es sich um eine große Datenmenge. „Dabei handelt es sich um Kunden-, Transaktions-, Bewegungs- und Verhaltensdaten, um Kommunikati- onsdaten und Social Media-Inhalte, um User Generated Content, um Daten aus Activity Trackern und Wearables, um Smart Home Daten und vielen anderen Quel- len.“ 21 Zum Beispiel das Ziel eines Supermarkets ist mehr Käufer zu bekommen oder zu gewinnen. So ist das Ziel eines Supermarkts, mehr Käufer zu bekommen 18 (Bundesministerium für Arbeit und Soziales 2015, 35) 19 Vgl. (Bundesministerium für Arbeit und Soziales 2015, 35) 20 Vgl. (Andelfinger und Hänisch 2017, 9) 21 (König, Schröder und Wiegand 2018, 18)
10 Industrie 4.0 oder zu gewinnen. Dabei ist die Umstellung der Käufergewohnheiten nicht so ein- fach, wie man sich das oft vorstellt, aber eben auch nicht unmöglich. 2.4.2 Internet of Things Bereits im Jahr 1991 war in Mark Weisers Aufsatz „The Computer for the 21st Century“ die Rede von Ubiquitous computing, auch als allgegenwärtiges Rechnen bekannt. Dieses umfasste eine vergrößerte Reichweite von vielen Computern in Form von Tablets und Sensoren, die miteinander kommunizieren können.22 Später im Jahre 1999 wurde die Bezeichnung „Internet of Things“, auch als Internet der Dinge benannt, durch Kevin Ashton geprägt.23 Heutzutage enthalten die mobilen Endgeräte eine Vielzahl der neuwertigen Sensoren, wie beispielsweise für die Tem- peratur, Beschleunigung und Position. Einen enormen Vorteil bietet die Datenaus- wertung der verschiedenen Smartphones. Diese können beispielsweise präzise ein Erdbeben oder Verkehrsunfälle vorhersagen beziehungsweise verhindern. Weiter- hin können die Algorithmen die Dynamik von Menschengruppen bei Massenveran- staltungen analysieren. Somit können Veranstalter und Rettungsdienste diese Da- ten verwerten, um mögliche Katastrophen zu verhindern. So können beispielsweise bei Großveranstaltungen wie Fußball-Weltmeisterschaften mit Hilfe dieser Algorith- men Menschengedränge oder gar Massenpaniken vermieden werden.24 2.4.3 3D-Druck Der 3D-Druck existiert schon seit 30 Jahren in großen Unternehmen und wurde zur Herstellung von Musterbeispielen angewendet. Heute können auch Hobbyanwen- der sich einen kleinen 3D Drucker leisten, denn sie sind nicht so teuer und kosten bis zu 1000 Euro. Die Funktion eines 3D- Druckers ist ähnlich zu einem normalen Drucker. Ein normaler Drucker erzeugt ein Bild auf Papier mit abgetrennten kleinen Tröpfchen, die einen kleinen, farbigen Punkt hinterlassen. Dagegen werden beim 22 Vgl. (Weiser 09/1991) 23 Vgl. (Ashton 2009) 24 (Andelfinger und Hänisch 2017, 12-13)
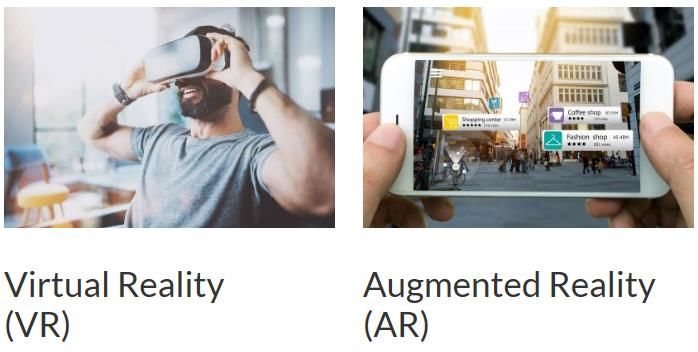
Industrie 4.0 11 3D-Drucker kleine dreidimensionale Pünktchen Schicht für Schicht auf einen Trä- ger gedruckt. Einer der Nachteile der 3D Drucker besteht darin, dass der Druckvor- gang viel Zeit braucht. Je nach Verfahren kann es durchaus mehrere Stunden dau- ern, bis ein größeres Objekt abgeschlossen wird. Ein weiterer Nachteil wäre, dass das fertigte Objekt durch die Hitze weich wird. Hierbei werden meistens thermoplas- tischen Kunststoffe benutzt, doch deren Eigenschaften erschweren die Benutzung. Es existieren auch Verfahren, die mit Metall oder Keramik durch Unterstützung von Laserintern gedruckt werden, die mechanisch anspruchsvolle Teile anfertigen kön- nen. Noch ist die Einführung der 3D-Drucker in der Industrie nicht durchsetzbar. Einer der Gründe ist der hohe Zeitverbrauch für eine Produktherstellung. Zudem benötigt die Herstellung von sehr hohen Stückzahlen auch viele Drucker, die gleich- zeitig arbeiten. Dies könnte in der Zukunft machbar sein, meinen die Befürworter dieser Verfahren, indem Tausende 3D-Drucken in Fabriken zur Verfügung stehen. Wenn das in der Zukunft durchführbar wird, werden die Produkte im 3D Druck her- gestellt, und dies bedeutet wiederum, dass Produkte nur dann hergestellt werden, wenn es beauftragt oder benötigt wird. Die Serienfertigung würde hier dann wegfal- len. Zentrale Fabriken werden nicht mehr nachgefragt, denn die Produkte werden dort hergestellt, wo sie auch nachgefragt werden. So wird eine Werkstatt in Zukunft die Ersatzteile mit Hilfe der 3D-Drucker selbst ausdrucken. Wenn mechanische Teile exakt hergestellt werden können, wäre die Waffenherstellung auch sehr ein- fach, was wiederum viele Probleme mit sich bringen wird.25 2.4.4 Virtual & Augmented Reality Virtual Reality (VR) in der Abbildung 5 bedeutet, dass der Nutzer komplett in eine unechte Welt eintaucht. Diese Welt ermöglicht eine neue Perspektive, die man aus einem 360-Gradwinkel betrachten kann. In der virtuellen Realität ist es möglich sich zu bewegen und sogar auch zu kommunizieren. Das Eintauchen ist nur mit Hilfs- mitteln, wie zum Beispiel einer VR-Brille, zu sehen und zu spüren. Augmented Re- ality (AR) in der Abbildung 5 bedeutet, dass der Nutzer die reale Welt mit vorstell- 25 Vgl. (Andelfinger und Hänisch 2017, 16-19)
12 Industrie 4.0
baren Inhalten dargestellt bekommt. Alle Dinge, die man gerade wahrnimmt, wer-
den mit Informationen wie zum Beispiel Animationen, Texten, Grafiken, Videos oder
bewegten 3D-Objekten erweitert.26 Die Computerspiele als Virtual Reality (VR) sind
sehr populär, nicht zuletzt da dabei die Virtuelle Realität Brillen wie Oculus Rift, HTC
Vive oder Playstation als VR den Nutzern glaubhafte Simulationen der „realen“ Welt
bieten. Es wird auch im Unternehmen eingesetzt, etwa in der Ausbildung und beim
Design, um damit die Prozesse der Neuentwicklung von Modellen planen und zu
beschleunigen. Die Augmented Reality wäre im Gegensatz dazu für die praktische
Anwendung wirkungsvoller, da der Nutzer die reale Welt mitfühlen kann und nicht
komplett von der Realität ausgeblendet wird. Eines der beliebten und unkomplizier-
ten Spiele wäre hier der AR Pokémon Go. Von einen bestimmten Standpunkt wird
die Rolle von Mensch und Maschine hier vertauscht. Die Anweisung kommt von
der Maschine und die Ausführung erfolgt über den Menschen. Die Virtual Reality
wird auch in der Medizin eingesetzt. Beispielsweise kann ein Chirurg mittels der
virtuellen Umgebung eine Operation ausführen. Eine weitere Anwendung findet bei
militärischen Einsätzen statt. Wenn die Soldaten verletzt werden, sind die Roboter
eine gute Alternative, die eine schnelle Hilfe vor Ort per VR leisten können.27
Abbildung 5: VR und AR 28
26 Vgl. (Unterschied Virtual Reality (VR) und Augmented Reality (AR) 2017)
27 Vgl. (Andelfinger und Hänisch 2017, 21-23)
28 Entnommen aus (Unterschied Virtual Reality (VR) und Augmented Reality (AR) 2017)Industrie 4.0 13 2.4.5 Drohnen Drohnen wurden früher prinzipiell bzw. ausschließlich in militärischen Missionen an Kampforten eingesetzt, die von Soldaten aus sicherer Entfernung gesteuert werden. Dagegen ist es heute nicht selten, dass man beim Blick in den Himmel und auf öffentliche Plätze zivile Drohnen sieht, denn Drohnen sind heute, gemessen an ih- rem Leistungsstand, sehr preiswert und derweil für jedermann erhältlich. Mittler- weile werden sie nicht nur in der Freizeit eingesetzt, sondern auch auf Baustellen, in der Landwirtschaft, bei der Videoüberwachung, für Vermessungs- und For- schungszwecke sowie in der Medienberichterstattung. Eine der modernen Drohnen ist die DJI Phantom 4, welche eine 4k Videokamera, eine Flugdauer von etwa 30 min hat und etwa 70 km/h schnell mit einem Autopiloten fliegt, den auch Laien be- dienen können.29 29 Vgl. (Andelfinger und Hänisch 2017, 23-25)
14 Robotik in der Medizin
3 Robotik in der Medizin
3.1 Definition von Robotern
Eine der Definitionen für Roboter, und zwar nach der VDI-Richtlinie 2860 (Verein
Deutscher Ingenieure) von 1990, wurde wie folgt aufgestellt:
„Ein Roboter ist ein frei und wieder programmierbarer, multifunktionaler Manipulator
mit mindesten drei unabhängigen Achsen, um Materialen, Teile, Werkzeuge oder
spezielle Geräte auf programmierten, variablen Bahnen zu bewegen zu Erfüllung
der verschiedensten Aufgaben. „30 Diese Definition charakterisiert wie in Abbildung
6 einen klassischen Industrieroboter, und wurde 1994 für den internationalen ISO-
Standard auch mehrheitlich übernommen.
Abbildung 6 Typische Konfiguration eines Industrieroboters 31
30 (T. Christaller, et al. 2001, 18).
31 Entnommen aus (T. Christaller, et al. 2001, 19).Robotik in der Medizin 15
3.2 Geschichte
Der Begriff „Roboter“ wurde zum ersten Mal 1922 in einem Theaterstück „ Rossum
Universal Robots“ des tschechischen Schriftstellers Karel Capeks geprägt. Seitdem
werden Roboter mit hochentwickelter intelligenter Technik als selbständige Auto-
maten identifiziert. Die geschichtliche Entwicklung der Roboter ist in der Tabelle 1
dargestellt.
Um 1700 Technik der mechanischen Uhren, und Entwicklung von musikspielenden Puppen.
1950 - 60 Die Rechnertechnik wird kommerziell eingesetzt, Devol und Joe Engleberger entwi-
ckeln den ersten programmierbaren Roboter.
1960 - 70 Der Mikroprozessor wird erfunden und in Steuerungen eingesetzt. Roboter in der
Automobilindustrie in größerem Umfang für Schweißen und Handhabung verwen-
det. Der erste Roboter mit zwei Beinen wird entwickelt.
1980 - 90 Die Leistungsfähigkeit der Mikrocomputertechnik steigt rasant. Die Schnelligkeit und
Genauigkeit von Robotersystemen werden verbessert. Die Anzahl der eingesetzten
Systeme nimmt stark zu. Roboter werden mit Sensoren und Kameras ausgestattet.
1990 - 2000 Steuerungen werden auf die PC-Technik umgestellt. Die Vernetzung über das Inter-
net nimmt zu. Neu Anwendungsbereiche für Industrieroboter außerhalb der Auto-
mobilindustrie werden erschlossen. Serviceroboter und mobile Roboter werden
entwickelt und in ersten Anwendungen eingesetzt.
2000 - 2009 Die Leistungsfähigkeit der Rechner erlaubt die Realisierung von intelligenten Syste-
men. Medizinroboter werden zur Praxisreife gebracht, roboterähnliche Bewegungs-
strukturen als künstliche Glieder und künstliche Sinnesorgane entwickelt. Koopera-
tive und humanoide Roboter werden entwickelt. Mikro- und Makroroboter werden
entwickelt.
Tabelle 1: Geschichtliche Entwicklung32
32 Zum größtenteils Entnommen (Stark 2009, 14)16 Robotik in der Medizin Hoffnungen auf mehr Wohlstand und zumindest physisch weniger anstrengende Arbeitsplätze waren die positive Seite der Roboter-Entwicklung, aber es gab auch Ängste vor Arbeitsplatzabbau, Armut und Abhängigkeit durch Roboter. Das Univer- salgenie Leonardo da Vinci machte im 16. Jahrhundert den ersten Entwurf einer Maschine, die fast wie ein Roboter aussah. Wie in der Tabelle 1 dargestellt, wurden im Jahre 1700 die ersten Musik spielenden Puppen als Roboter gebaut. Ab Mitte der 1980er kamen die ersten Sensoren und Kamerasysteme auf, womit sich die Komplexität steigerte bzw. verbesserte. Erst im 1990 kamen die ersten Servicero- boter und ab dem Jahr 2000 auch Medizinroboter und humanoide Roboter mit Ar- men und Beinen, welche dann auch im Krankenhaus oder in Arztpraxen als Assis- tenten von Menschen eingesetzt worden sind.33 3.3 Roboterarten Es gibt eine Reihe von Robotern in verschiedensten Einsatzgebieten, wie zum Bei- spiel Industrieroboter, Autonome mobile Roboter, Spielzeugroboter, Erkundungsro- boter (Militärroboter) usw., die auch in der Industrie 4.0 in vielen Bereichen verwen- det werden. In meiner wissenschaftliche Arbeit geht es hauptsächlich um das Thema der Medizinroboter in Krankenhäusern, wobei es 4 Roboterarten gibt: Ser- viceroboter, Humanoide Roboter, Medizinroboter und Soziale Robotik. Diese wer- den im nächsten Kapitel näher erläutert. Es wird auf die Funktion und die Tätigkeit (Aufgaben) der einzelnen Roboter fokussiert. 3.3.1 Serviceroboter Der Serviceroboter wurde 1998 in dem Buch (Serviceroboter: Produkte, Szenarien, Visionen) von Rolf Dieter Schraft und Gernot Schmierer wie folgt definiert: „Ein Serviceroboter ist eine freiprogrammierbare Bewegungseinrichtung, die Teil o- der vollautomatisch Dienstleistungen verrichtet. Dienstleistungen sind dabei Tätig- keiten, die nicht der direkten industriellen Erzeugung von Sachgütern, sondern der 33 Vgl. (Stark 2009, 13)
Robotik in der Medizin 17
Verrichtung von Leistungen an Menschen und Einrichtungen dienen.“34 Die Service-
roboter dienen der Unterstützung, Begleitung und Pflege von Menschen und er-
leichtern die Arbeitsaufgaben.
Abbildung 7: Serviceroboter Arten35
Wie in Abbildung 7 gezeigt, gibt es eine Menge von Serviceroboter-Arten, die man
fast überall einsetzen kann. Schwerpunkt dieses Kapitelabschnitts werden die
Pflege/ Rehabilitation und Reinigungsroboter in Krankenhäusern sein.
3.3.1.1 Serviceroboter für Pflege
In dem Buch „Mein Freund der Roboter“ von Sibylle Meyer werden vier Arten von
Servicerobotern dargestellt, die von Bundesministerium für Bildung und Forschung
gefördert worden sind, und heute noch als wichtigste Arten der Pflegeroboter be-
trachtet werden.
34 (Schraft und Schmierer 1998).
35 Entnommen aus (Röfer 2000, 9)18 Robotik in der Medizin
a) Fahrerlose Transportsysteme
Fahrerlose Transportsysteme (FTS) sind automatisch gesteuerte, flurgebundene
Fahrzeuge (Transporter). Für die Steuerung des Transporters sind Daten notwen-
dig, die durch Kommunikation mit dem Transporter übertragen werden.
Die Aufgabe solcher Minitransporter wie zum Beispiel in der Abbildung 8 der
CASERO besteht darin, in den Gängen einer Pflegeeinrichtung oder eines Kran-
kenhauses, Gegenstände, Wäsche (z.B. Bettwäsche), Mahlzeiten oder Medika-
mente für die Patienten zu transportieren, oder aber Mülleimer abtransportieren o-
der zu entleeren.36
Abbildung 8: CASERO, (WiMi Care, MLR System GmbH)37
b) Serviceroboter zu Betreuung
Serviceroboter in Pflegeheimen, Reha-Einrichtungen oder Krankenhäusern könn-
ten auch zur Betreuung der Patienten eingesetzt werden. Dies bedeutet für die Pa-
tienten, direkten Kontakt zum Serviceroboter zu haben und mit diesem auch spre-
chen zu müssen. Als Nachfolger von Care-o-bot 3 in Abbildung 9 kam im Jahr 2015
der Care-o-bot 4 (Abbildung 10), der durch das Fraunhofer IPA entwickelt wurde.
Die Tätigkeiten, die der Roboter im Krankenhaus übernehmen konnte, waren die
36 Vgl. (Meyer 2011, 94)
37 (System 2018)Robotik in der Medizin 19 Lieferung von Essen und Getränken an Patienten oder von dem, was der Patient sonst benötigt, wobei der Roboter natürlich auch auf Sprechen reagieren kann. Wenn der Care-o-bot 4 Getränke etwas zum Trinken geholt hat, fordert dieser die Patienten freundlich auf zu trinken. Dies wird auch erfasst und dokumentiert durch den Roboter. Damit wird ein Überblick für das Pflegepersonal geschaffen und im Fall eines Problems kann es schnell eingreifen.38 Abbildung 9 : Care-O-Bot 3 – Praxistest im Altenheim39 Abbildung 10: Care-O-Bot 4 – Pflege Unterstützung und ein echter Gentleman40 38 Vgl. (Meyer 2011, 95) 39 Entnommen aus (Altenheim 2011) 40 Entnommen aus ( (Frauenhofer 2015)
20 Robotik in der Medizin
c) Roboter zum Heben der Patienten
Das regelmäßige Heben von Patienten führte zu einer hohen körperlichen Belas-
tung der Pflegekräfte. Hauptsächlich mussten viele Arbeitskräfte mit einer hohen
Rückenbeanspruchung rechnen. Japanische Forscher haben im Jahre 2015 den
Serviceroboter ROBEAR für Pflegekräfte (Abbildung 11) entwickelt. Der Robear Ro-
boter kann Patienten vom Bett heben, in den Rollstuhl übernehmen und ihnen beim
Aufstehen halten bzw. helfen.41 Die Idee war, „…die Gefahr, einen Patienten plötz-
lich aus dem Griff zu verlieren, was für den Patienten weitrechende gesundheitliche
Folgen haben könnte.“ 42
Abbildung 11: Robear (Bärenroboter) 201543
d) Hygiene und Körperpflege
Hygiene und Körperpflege selbst durchzuführen, wie zum Beispiel Duschen, Baden
oder Toilettengänge ohne fremde Hilfe, sind eine charakteristische Eigenschaft
selbstständiger Lebensführung. Die Abhängigkeit der Hygiene älterer Menschen
von der Unterstützung durch Pflegekräfte, ist vielen älteren Menschen peinlich und
wird so lange wie möglich vermieden. Anderseits ist die Körperpflege für das Pfle-
gepersonal eine sehr anstrengende Arbeit und bisweilen mit unangenehmen Ge-
fühlen bis hin zum Ekel verbunden. Für die Entlastung der Pflegekräfte und eine
41 Vgl. (Meyer 2011, 97)
42 (Meyer 2011, 97)
43 (Xabes.com 2015)Robotik in der Medizin 21
positive Empfindung für die Betroffenen, wären die Anwendungen der Servicerobo-
tik hilfreich. Diese könnte beim Gang zum Bad oder zur Toilette unterstützen, beim
Entkleiden und Anziehen helfen oder Körperhygiene unterstützen. Für den Bereich
der körperlichen Hygiene gibt es jedoch kaum technische Assistenzsysteme oder
Roboteranwendungen. Die Literatur ergab bis dato lediglich drei Anwendungssze-
narien. 44
HIRB ( Harmony In Roll- lo Bathing, Sanyo) in Abbildung 12, ist eine Wachstation
für Patienten, die im japanischen Pflegeheim erprobt wird. Der Patient fährt mit sei-
nen Rollstuhl in das HIRB-System hinein. Von oben schließt sich eine Klappe, so
dass der Nutzer bis zum Hals in einem Behälter sitzt. Dann wird das Badeprogramm
vom Nutzer gestartet. Bei der Probe waren viele Anwender zufrieden, da es ange-
nehm warm beim Baden/Duschen war und gleichzeitig die Privatsphäre gesichert
werden kann. Für das Pflegepersonal ist HIRB selbstverständlich eine Arbeitser-
leichterung und Zeitersparnis. 45
Abbildung 12: Automatische japanische Seniorendusche HIRB46
44Vgl. (Meyer 2011, 99)
45 Vgl. (Meyer 2011, 99)
46 Entnommen aus (Sanyo Retro-Builder 2009)22 Robotik in der Medizin
Das Europa Projekt „Friendly Rest Room“ entwickelte eine intelligente Toilette
mit Sensorsystem, Bewegungssteuerung und Sprachsteuerung. Die Fähigkeit einer
solchen Toilette ist, dass beim Betreten oder Befahren der Toilette der Benutzer
sofort erkannt wird. Demzufolge wird automatisch für den Benutzer die optimale
Höhe eingestellt. Es schwenkt sich, der Griff und die Haltestangen kommen hervor
und unterstützten altersschwache Menschen beim Hinsetzen, Aufstehen und auch
beim Weg vom Rollstuhl auf die Toilette und zurück. Nachdem der Benutzer die
Toilette verlassen hat, erfolgt eine automatische Reinigung der intelligenten Toilette.
Danach stellt sich die Toilette wieder in die Anfangsposition ein, damit für den
nächsten Benutzer der optimale Zustand bereitsteht.47
Poseidon ist der erste leistungsfähige Hygieneroboter der Welt. Ein Hilfsmittel, das
auf eine besondere Weise älteren Menschen hilft, sich selbstständig um ihre per-
sönliche Hygiene zu sorgen. Ein fertiger, klinisch getesteter Poseidon-Hygienero-
boter ist Ende 2016 in nordeuropäische Gesundheitszentren vorgestellt worden. Po-
seidon in Abbildung 13 ermöglicht pflegebedürftigen Personen eine private persön-
liche intime Pflege als einen Moment, auf den man sich freut und zugleich Kraft und
Selbstvertrauen gibt und damit Lebensqualität steigert.
Abbildung 13: Poseidon Hygienroboter48
47Vgl. (Meyer 2011, 99)
48 Entnommen aus (Care 2018)Robotik in der Medizin 23 Durch schweres Heben folgen viele Krankheitsausfälle von Arbeitskräfte im Pflege- bereich. Außerdem werden auf nassem Boden viele Sturzunfälle verursacht, welche durch den Poseidon-Roboter minimiert werden. Der ergonomische Stuhl wird durch besagte Software, Sensoren und Motoren gesteuert. Der Duschbereich ist für den Benutzer so entwickelt, dass der Benutzer sich in dem geschlossenen Umfeld sicher und entspannt fühlt. Beim Ausfahren des Stuhles werden die Armlehnen ausbalan- ciert und der Stuhl wird optimal gekippt, so dass sich der Benutzer zurechtsetzen kann. Die Sitzoberfläche ist einstellbar, und die Rückenlehne ist so entwickelt, dass sie eine angenehme Stütze gibt. Der starke Teleskoparm hebt den Stuhl mit einer langsamen Bewegung im Duschbereich an, ohne dass der Benutzer oder das Pfle- gepersonal einen nassen und glatten Boden betreten müssen. 49 3.3.1.2 Rehabilitationsroboter Die Rehabilitation lässt sich nach Technical Report 668/1981 der Weltgesundheits- organisation (WHO 1981, S. 9) wie folgt definieren: „Rehabilitation umfasst den koordinierten Einsatz medizinischer, sozialer, berufli- cher, pädagogischer und technischer Maßnahmen sowie Einflussnahmen auf das physische und soziale Umfeld zur Funktionsverbesserung zum Erreichen einer größtmöglichen Eigenaktivität zur weitest gehenden Partizipation in allen Lebens- bereichen, damit der Betroffene in seiner Lebensgestaltung so frei wie möglich wird.“50 Schlaganfälle sind in Deutschland in vielen Fällen Grund für dauerhafte Be- hinderung. Daher wird aus medizinischer Sicht das Rehabilitationstraining von be- troffenen Patienten als sehr wichtiger Aspekt betrachtet. Heute gibt es ver- schiedenste Trainingsgeräte und Reha-Roboter für eine intensive Therapie, längere Übungszeiten sowie für eine Stärkung der Motivation und des Selbstbewusstseins 49 (Care 2018) 50 (Beise , Heimes und Schwarz 2013, 36)
24 Robotik in der Medizin
der Patienten. Gemäß dem Buch „Robotik in der Betreuung und Gesundheitsver-
sorgung“ werden nun zwei Beispiele der Reha-Roboter (ARMin- Roboter, den Lo-
komaten) dargestellt.
ARMin- Roboter hilft Patienten nach einem Gehirnschlag beim Wiedererlernen der
Arm- und Handbewegungen. ARMin fokussiert sich hauptsächlich im Bereich
Ober- und Unterarm des Patienten. Zur Kommunikation dient ein Bildschirm
mit Audioausgabe, welche den Patienten durch Übungen führt und ihm erlaubt,
selbständig Alltagsbewegungen zu üben. Der Armin-Roboter wurde an der ETH Zü-
rich entwickelt.51
Die Lokomaten- Laufbandroboter, sind durch die berühmte Schweizer Firma
Hocoma entwickelt wurden. Ein automatisierter Laufbandtrainer, der Schlaganfall-
Patienten mit Gehbehinderung trainiert.52 Eine der neusten Entwicklung im Bereich
Reha-Roboter ist der Exoskelett. Dieses dient dazu, den querschnittsgelähmten
Patienten eine Möglichkeit zu geben, wieder allein auf den Beinen zu stehen.
Abbildung 14: Exoskelett53
51 Vgl. (Becker, et al. 2013, 26)
52 Vgl. (Becker, et al. 2013, 26)
53 Entnommen aus (Limb 2018)Robotik in der Medizin 25 Ein Exoskelett (Abbildung 13) ist ein künstliches Außenskelett, das den menschli- chen Körper stärkt. Die Idee dieser Entwickelung bestand darin, Patienten mit gra- vierenden Bewegungseinschränkungen das Laufen wieder zu ermöglichen. Mit Hilfe des Exoskeletts wäre fast alles möglich, wie zum Beispiel Stehen, Laufen, Auf- stehen, Hinsetzen, Sich-Umdrehen, Treppensteigen und auf harten und flachen Oberflächen gehen. Außerdem sind Steigungen und Abhänge auch problemlos be- tretbar. So ist es ein großer Wunsch betroffener Patienten, in einem Gespräch auf Augenhöhe zu stehen. Diese Motivation bringt den Menschen dazu, mehr zu trai- nieren und sie werden deutlich schneller gesund.54 Der Reha-Roboter „Roreas“ der seit 2016 in den Zeitschriften immer wieder auf- taucht, ist für die Reha Patienten eine große Hilfe. Die Fähigkeiten des Roboters Roreas (Abbildung 15) sind, mit dem Schlaganfallpatienten zu sprechen und sie beim Wieder-Erlernen des Laufens zu unterstützen. Der Reha-Roboter holt die Pa- tienten von ihrem Zimmer ab und startet mit ihnen gemeinsam das Training. Stets hinter dem Patienten läuft der Roboter, erklärt den Weg und weist sie rechtzeitig auf die nächst mögliche Sitzgelegenheit zum Erholen hin. Der Roboter verbringt viel Zeit mit dem Patienten bis das Tagesziel erreicht wird. "Die Orientierung ist wichtig, weil viele Patienten längere Wege in der Klinik aus Angst scheuen, den Weg zurück zum Zimmer nicht zu finden."55 Eine weitere Besonderheit hierbei ist, dass alle Do- kumentationen der Gehleistungen der Patienten im Roboter gespeichert werden. Somit wird der Patient durch den Roboter motiviert(er) und versucht das Training in die Länge zu ziehen, um weiter zu üben, was schließlich für die Gesundheit des Patienten als vorteilhaft angesehen werden kann. 54 Vgl. (Schütz 2013) 55 (Hilienhof 2016)
26 Robotik in der Medizin
Abbildung 15: Serviceroboter „Roreas“56
3.3.1.3 Reinigungsroboter
Krankenhausreinigung ist eine sorgfältige und ausführliche Reinigungsleistung in
Krankenhäusern/Kliniken. Im Hinblick sind strenge Hygienevorschriften einzuhal-
ten. Hierbei werden folgende Bereiche voneinander unterschieden:
Das Öffentliche Bereich, beinhaltet die Gänge, Empfangshallen, etc. im Kranken-
haus, das aufgrund von großen Menschenmengen immer wieder gründlich gereinigt
wird.57
Die Stationen werden täglich gereinigt, so zum Beispiel die Türgriffe, Lichtschalter,
Waschbecken, Toiletten, Fußböden usw. (in bestimmten Zeitabständen) gereinigt.
Dabei ist für die Gesundheit höchste Vorsicht in der Patientennähe und bei den
Kleidungsvorschriften zu beachten. Für die Gesundheit der Kranken ist die Sauber-
keit in Stationen physisch wie auch psychisch lebenswichtig. 58
56 Entnommen aus (Kathrin Gießelmann 2017)
57 Vgl. (Krankenhausreinigung 2018)
58 Vgl. (Sana Klinik Bethesda 2018)Robotik in der Medizin 27 Die Laborreinigung, muss ebenfalls gründlich erfolgen, allerdings unter Beachtung der Gefahrenstoffe und Gefahrenstellen. Außerdem spielt hier Wissen und Erfah- rung eine große Rolle, da es bei der Laborreinigung schnell zu Fehlern kommen kann.59 Das OP-Bereich, bei der OP-Reinigung gilt die strengste Reinigungsvorschrift, die durch Experten ordnungsgemäß erledigt werden kann. Ganz wichtig sind Klei- dungsvorschriften, Bereitschaftsdienst, spezielle Hygienevorschriften, Grundreini- gung und zusätzlich die Decken- und Fliesenreinigung, die alle im OP-Bereich zu beachten sind. 60 Schließlich die Sterilisation, die Abtötung bzw. Inaktivierung der Mikroorganismen und Keime im Krankenhaus. Grundvoraussetzung für diesen Bereich ist, die spezi- ellen Hygiene-Mittel zu kennen und die Vorschriften einzuhalten. Außerdem wird die Sterilisation von Instrumenten und Gerätschaften durch Experten erledigt. In den meisten Krankenhäusern wird die Instrumenten- und Gerätesterilisation im Kran- kenhaus (hausintern) durchgeführt.61 Der Reinigungsroboter in Krankenhäusern (TASKI SWINGOBOT 2000) Die Fähigkeit der Taski Reinigungsroboter besteht darin, das Infektionsrisiko deut- lich zu reduzieren, so dass der Hygienestandard weiter erhöht werden kann. „Der Reinigungsroboter übernimmt die repetitiven und zeitraubenden Aufgaben der Bo- denreinigung und das Reinigungspersonal hat somit mehr Zeit um komplexere Rei- nigungsaufgaben durchzuführen.“62 Der Reinigungsroboter ist auch aus wirtschaft- licher Sicht vorteilhafter für den langen Flur, die Versorgungswege, Stationen, Ein- 59 Vgl. (Klinik 2018) 60 Vgl. (Krankenhausreinigung 2018) 61 Vgl. (Krankenhausreinigung 2018) 62 Entnommen aus (TASKI Intellibot 2017)
28 Robotik in der Medizin
gangshallen und Wartebereiche des Krankenhauses, da diese Bereiche ohne gro-
ßen Aufwand gereinigt werden können. Dabei wären für die Bodenreinigung keine
menschlichen Arbeitskräfte mehr nötig.63
3.3.2 Humanoide Roboter
Den Humanoiden Roboter „Sophia“, kennen heutzutage fast jeder. Sophia (Abbil-
dung 16) ist der erste Roboter der Welt, der eine Staatsbürgerschaft (von Saudi-
Arabien) erhalten hat, da er menschenähnlich war. Im Buch von Helmut Maier
(Grundlagen der Robotik) werden Humanoide Roboter wie folgt beschrieben: „Bei
humanoiden Robotern handelt es sich um Roboter, die menschlichen Formen nach-
gebildet sind und weitgehend menschliche Funktionen übernehmen sollen und teils
auch können.“64 Mit anderen Worten gesagt, sind humanoide Roboter künstlich ge-
schaffene Quasi-Menschen, die in puncto Aufbau und Aussehen Menschen ähneln.
Abbildung 16: Jimmy meets Spohia the Human-Like Robot65
Der erste humanoide Roboter P1 wurde durch Honda im Jahr 1993 entwickelt. Dann
erschienen die Nachfolger P2 und P3 und erst im Jahre 2004 kam der berühmte
63 Vgl. (TASKI Intellibot 2017)
64 (Maier 2016, 242)
65 (Robotics 2017)Robotik in der Medizin 29
humanoide Roboter ASIMO (Abbildung 17), der die Fähigkeit, wie ein Mensch zu
laufen, beherrschte. 66
Abbildung 17: ASIMO von Honda67
Aber welchen Nutzen bringt ein humanoider Roboter in einem Krankenhaus? Es
gibt derzeit viele humanoide Roboter. Für die Krankenhäuser wären der humanoide
Pepper und Zora Roboter zurzeit sehr interessant.
Der Pepper Roboter ist 1,20 Meter groß und 29 kg schwer, sieht weiß und sanft
aus. Es hat jeweils zwei Arme und zwei Hände mit fünf Fingern, und mit seinen drei
Rädern kann er in jede Richtung fahren (Abbildung 18), ohne sich dabei zu drehen.
Er trägt einen smarten Bildschirm mit sich, wo man fast alles aufrufen kann. Seine
Funktion ist es, mit dem Patienten eine Interaktion aufzubauen.68
66 Vgl. (Maier 2016, 244)
67 Entnommen aus (Commons 2010)
68 Vgl. (MDR Wissen 2018)Sie können auch lesen