Einsatz der Road-Lab-Math Strategie bei der simulationsbasierten Entwicklung von Fahrdynamikregelsystemen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
VDI-Berichte Nr. 1931, 2006 695 Einsatz der Road-Lab-Math Strategie bei der simulationsbasierten Entwicklung von Fahrdynamikregelsystemen Dr.-Ing. M. Kochem, Dr.-Ing. H. Holzmann, Adam OPEL AG, Rüsselsheim Kurzfassung Aktuelle und zukünftige Fahrzeugentwicklungsprojekte sind durch eine hohe bzw. steigende Variantenvielfalt gekennzeichnet. Ohne Unterstützung durch Simulationen ist dies nicht zu bewältigen. Die Road-Lab-Math Strategie (RLM) hat zum Ziel, die Entwicklungsaktivitäten so zwischen Fahrversuch, Labor und Simulation zu verteilen, dass die maximalen Synergie- Effekte für die Entwicklung ausgenutzt werden können. Notwendig sind dazu die entsprechende Simulationsgüte und die automatisierte Simulation von umfangreichen Testszenarien. Am Beispiel eines aktuellen Fahrzeugprojektes zeigt dieser Beitrag wie die Umsetzung der RLM-Strategie zur Freigabeempfehlung der ABS-/ESP-Software bzw. deren Variantenparametern geführt hat. Abstract A rising number of variants characterizes actual and upcoming vehicle development projects. The development activities cannot be met without simulation support. Therefore, the Road- Lab-Math strategy (RLM) has been created to balance the development load between road testing, lab and math-based simulation. As a basis for that, a high simulation confidence as well as an automated simulation of various test scenarios are necessary. An actual vehicle development project serves as example how the RLM-strategy leads to release suggestions for the ABS-/ESC-software and its respective parameters. 1. Einleitung Aufgrund der zunehmenden Diversifikation von Karosserie- und Motor-/Getriebevarianten sowie der stark steigenden Zahl aktiver Regelsysteme gewinnt der Einsatz moderner Simu- lationsverfahren im Fahrzeugentwicklungsprozess zunehmend an Bedeutung. Es wird zu- künftig aus Kostengründen nicht mehr möglich sein, alle wesentlichen Varianten des Pro-
696 VDI-Berichte Nr. 1931, 2006 duktportfolios als reale Prototypen aufzubauen. Um dieser Tatsache Rechnung zu tragen, wird bei Opel seit einiger Zeit die sog. Road-Lab-Math Strategie verfolgt. Ziel dieser Strategie ist es, durch die Verlagerung der Entwicklungsaktivitäten weg von der Straße ins Labor (Hardware-in-the-Loop Simulation, HiL) oder auf den Rechner (Software-in-the-Loop Simu- lation, SiL) die Zahl von Prototypenfahrzeugen massiv zu reduzieren und gleichzeitig die Entwicklungszeit zu verkürzen. 2. Road-Lab-Math Strategie Vor einigen Jahren zielte die Road-Lab-Math Strategie durch Implikation einer gerichteten Vorgehensweise darauf ab, immer mehr Tätigkeiten weg von der Straße ins Labor oder auf den Rechner zu verlagern. Ziel sollte es sein, irgendwann in Zukunft alle Entwicklungs- tätigkeiten im Math-Umfeld zu erledigen. Dieses Fernziel hat sich mittlerweile insofern relativiert, als R-L-M nun als Koexistenz der Verfahren gesehen wird. Jede der drei Säulen verfügt über Stärken in verschiedenen Bereichen und nur eine gemeinsame Vorgehensweise schafft die Synergien, die zu einer wirklich effizienten Entwicklung von Fahrdynamikregel- systemen führt. 2.1 Road In früheren Fahrzeugprojekten erfolgte die Entwicklung und die Freigabe von Fahrdynamik- regelsystemen im Wesentlichen auf Basis der Beurteilung von Prototypenfahrzeugen im Fahrversuch (Road). In Kooperation mit dem Regelsystemzulieferer wurden die Software und die Parameter der Regler appliziert und schließlich freigegeben. Zukünftig bzw. bereits im hier betrachteten Fahrzeugprojekt ist diese Vorgehensweise nicht mehr möglich, da nicht genügend Prototypenfahrzeuge in allen Entwicklungsphasen zur Verfügung stehen. Am Beispiel eines aktuellen Fahrzeugprojekts soll die Aufteilung zwischen Fahrversuch und Simulation (Road und Lab/Math) bei der Entwicklung der Regelsysteme ABS und ESP verdeutlicht werden. Bild 1 gibt eine Übersicht aller möglichen Fahrzeugvarianten. Aufgespannt wird die Matrix auf der einen Seite von den verschiedenen Motorvarianten, die jeweils mit verschiedenen Getriebevarianten, Basis- oder Sportfahrwerk sowie ABS oder ESP kombiniert werden können. Schwarz markierte Felder sind dabei kein Bestandteil des Produktportfolios. Insgesamt existieren also 37 Fahrzeugvarianten.
VDI-Berichte Nr. 1931, 2006 697
ABS ESP
Basis Sport Basis Sport
MT MTA AT MT MTA MT MTA AT MT MTA
Otto 1
Otto 2
Otto 3
Otto 4
Diesel 1
Diesel 2
Diesel 3
Bild 1: Variantenvielfalt innerhalb eines aktuellen Fahrzeugprojekts
Die 15 schraffierten Felder markieren die Varianten, die im Rahmen des Fahrzeugentwick-
lungsprozesses als reale Prototypenfahrzeuge aufgebaut und im Fahrversuch appliziert
werden. Die verbleibenden 22 hellen Felder werden ausschließlich durch die Simulation
abgedeckt. Um diese Vorgehensweise zu realisieren, ist das Vorhandensein gleicher Ent-
wicklungswerkzeuge bei Fahrversuch und in der Simulation notwendig. Insbesondere die
Beurteilung von durch die Simulation erzeugten fahrdynamischen Daten durch Applikateure
des Zulieferers bzw. des eigenen Fahrversuchs wird dadurch deutlich erleichtert. Bild 2 gibt
einen Überblick über die drei Säulen im Entwicklungsprozess von Fahrdynamikregel-
systemen (z.B. ABS, ESP).
Road Lab Math
(Driving Test) (HiL – Simulation) (SiL – Simulation)
1
? ?? 1
[stwhl_ang]
1/z
stwhl_ang
Manöver 1
1
1/z
1
1
0
0
[gas_gear_c
1/zlutch]
gas_gear_clutch
1
1
Straßenanregung MatCar
Adam Opel AG
1
EngRngSt_value
1
[BLS]
CDC
[man_mcp]
man_mc p
1
1
Demux
IVCS
ESP / ABS / TCS IVCS
Applikation Performance Check Performance Check
Random Testing Diagnose Systemintegration
Validierung Failsafe Optimierung
Bild 2: Säulen der Road-Lab-Math Strategie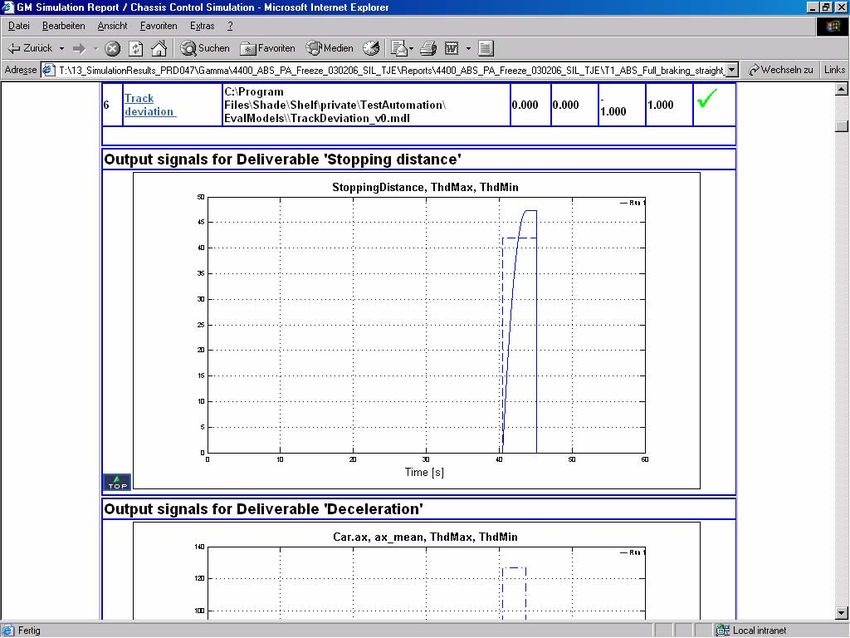
698 VDI-Berichte Nr. 1931, 2006
2.2 Lab
Untersuchungen im Bereich Failsafe und Diagnose werden schon seit mehr als zehn Jahren
im Labor unter Verwendung von HiL-Simulatoren durchgeführt. In aktuellen Fahrzeug-
projekten ist der Einsatz von HiL-Simulatoren nicht mehr nur auf den Bereich Diagnose/
Failsafe begrenzt. Aufgrund der Verfügbarkeit hochgenauer fahrdynamischer Modelle,
welche sowohl in der SiL, wie auch gleichermaßen in der HiL-Umgebung zur Verfügung
stehen, kann auch auf einem HiL-System das Fahrverhalten detailliert untersucht und das
Reglerverhalten bewertet werden.
2.3 Math
Auch rein rechnerbasierte Simulationsverfahren (Math) gewinnen zunehmend an Bedeutung,
da die Regelsystemhersteller mittlerweile in der Lage sind, zeitnah Regler-Simulationsmo-
delle zu generieren, die das Reglerverhalten des realen Steuergeräts (ECU) exakt abbilden.
Die Verwendung von SiL-Simulationen bietet sich dabei insbesondere zur funktionalen
Integration neuer Reglerkonzepte sowie zur automatischen Optimierung von Parametern an.
Zudem bietet die SiL-Simulation die Sicherheit der Reproduzierbarkeit von Ergebnissen.
Erkauft wird dieser Vorteil allerdings durch die ausschließlich funktionale Abbildung des
Zusammenwirkens zwischen Fahrzeug und Fahrzeugregler. Kommunikationsschichten der
ECU werden in SiL in der Regel nicht abgebildet. Ebenso wenig wird dabei eine Restbus-
simulation durchgeführt. Somit beschränkt sich die SiL-Simulation auf die Abbildung der
reinen Funktionalität der verschiedenen Fahrzeugregelkreise und deren Interaktion mit dem
Fahrzeug.
Software-in-the-Loop
Simulation (SiL)
[man_mcp]
man_mcp
1
1
??? 1
1/z1
[stwhl_ang]
stwhl_ang
Manöver 1
Demu x
1/z1
1
1
0
0
IVCS [gas_gear_clutch]
1/z
ESP / ABS / TCS gas_gear_clutch
IVCS 1
1
ABS/ESP Model Straßenanregung MatCar
Adam Opel AG
1
EngRngSt_value
Simulation
Results
1
[BLS]
CDC
[man_mcp]
Axle Model
man_mcp
1
1
Demux
IVCS
ESP / ABS / TCS IVCS
Vehicle
Dynamics VV Chart
Model based on VTS
ABS/ESP ECU Hardware-in-the-Loop
Simulation (HiL)
Bild 3: Simulationsumgebung zur Entwicklung von Fahrdynamikregelsystemen
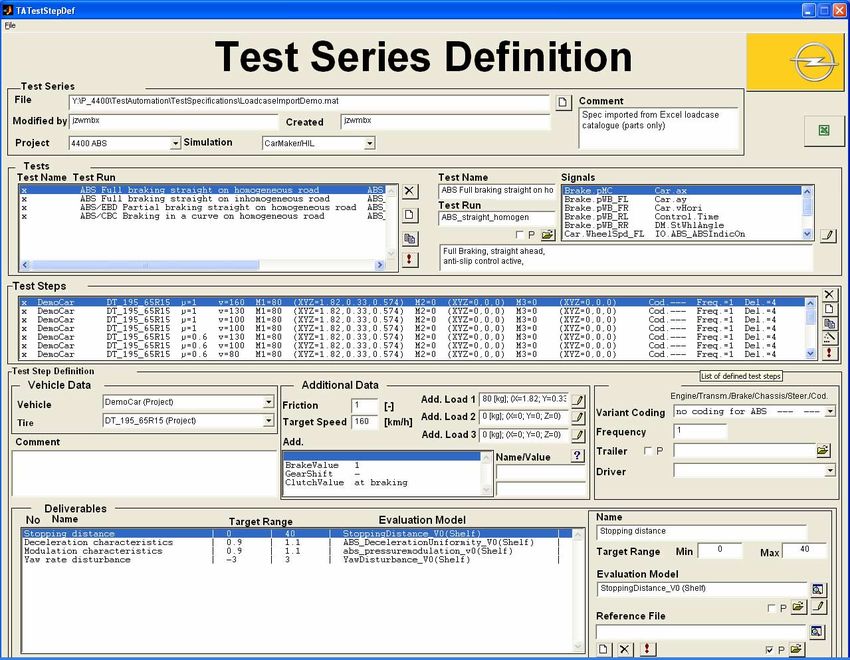
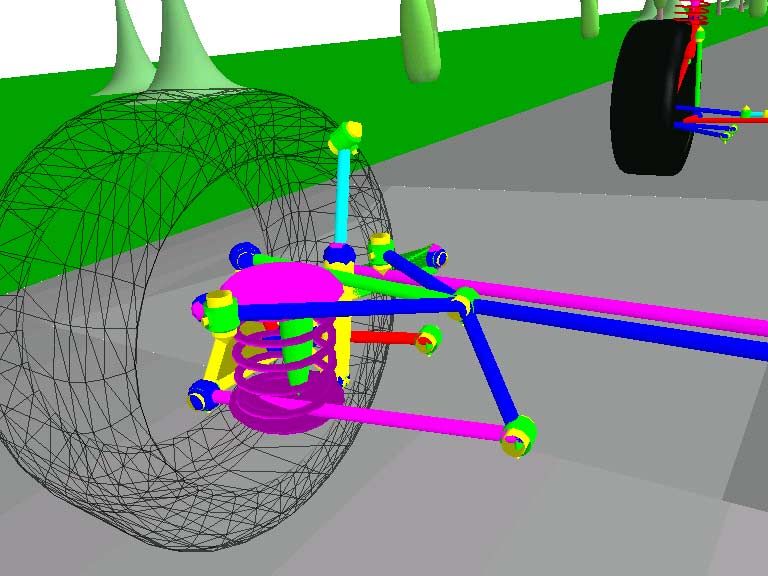
VDI-Berichte Nr. 1931, 2006 699 Bild 3 gibt einen schematischen Überblick über die bei Opel zur HiL- und SiL-Simulation (Lab, Math) von Fahrdynamikregelsystemen eingesetzte Entwicklungsumgebung. Das zen- trale Element der Entwicklungsumgebung ist das Modell der Fahrdynamik. Hier wird die kommerzielle Fahrzeugsimulationsumgebung CarMaker der Firma IPG eingesetzt. Die Be- datung des CarMaker Modells erfolgt auf der Basis Opel-interner Mehrkörpersimulations- modelle der Achsen. Im Rahmen der SiL-Simulation wird das CarMaker Fahrzeugmodell innerhalb der Entwick- lungsumgebung MATLAB/Simulink mit einem vom Zulieferer generierten Reglermodell verschaltet. Im Unterschied zur SiL-Simulation wird bei der HiL-Simulation ein reales ABS/ ESP-Steuergerät verwendet, was im geschlossenen Regelkreis mit dem CarMaker Fahrzeugmodell interagiert. Die Ergebnisse sowohl der SiL- als auch der HiL-Simulation können in Kurvenform, als 3-D Animation oder anhand komprimierter Kennwerte innerhalb eines VV-Charts (Virtual Vehicle Chart) dargestellt werden. 3. Testautomatisierung und Fahrmanöverkatalog Im Rahmen der Simulation wird mit den Fahrzeugen ein umfangreiches Testprogramm ab- solviert. In engem Kontakt mit dem Fahrversuch wurden 108 repräsentative Lastfälle für ABS, ESP und TC entwickelt. Der Ansatz der Definition von Lastfällen mit entsprechenden Zielgrößen erlaubt es, die langjährige Erfahrung von Fahrversuchs-Mitarbeitern bei der Beur- teilung von Regelsystemen in eine rechnergeeignete Darstellung zu überführen. Sämtliche Lastfälle müssen zum Test eines Regelsystem-Applikationsstandes mehrfach mit verschiedenen Fahrzeug- bzw. Umgebungsparametrierungen durchlaufen werden (z.B. ver- schiedene Beladung, Fahrbahnreibwerte,...). Basierend auf einer Annahme von 10 verschie- denen Parametrierungen ergibt sich bei 22 Fahrzeugvarianten und 108 Lastfällen eine Gesamtzahl von 23760 Simulationsdurchläufen. Hier wird unmittelbar klar, dass eine sinn- volle Durchführung und Auswertung einer so großen Anzahl von Simulationen nur mit Hilfe einer Automatisierung möglich ist. Dazu wurde bei Opel ein Testautomatisierungstool entwickelt, welches sowohl die SiL- als auch die HiL-Simulationsumgebung ansteuern kann. Mit Hilfe der Matlab-Skript-basierten Testautomatisierung können umfangreiche Testserien über Nacht oder am Wochenende durchgeführt und anhand definierter Bewertungskriterien automatisiert ausgewertet werden. Neben der normalen Ansteuerung kann die Testauto- matisierung sowohl in SiL verschiedene Software-Varianten im Steuergerät bedienen oder bei Bedarf verschiedene Varianten auf der HiL-Umgebung im jeweiligen Steuergerät auto- matisiert flashen. Bild 4 zeigt eine der grafischen Benutzeroberflächen zur Generierung von
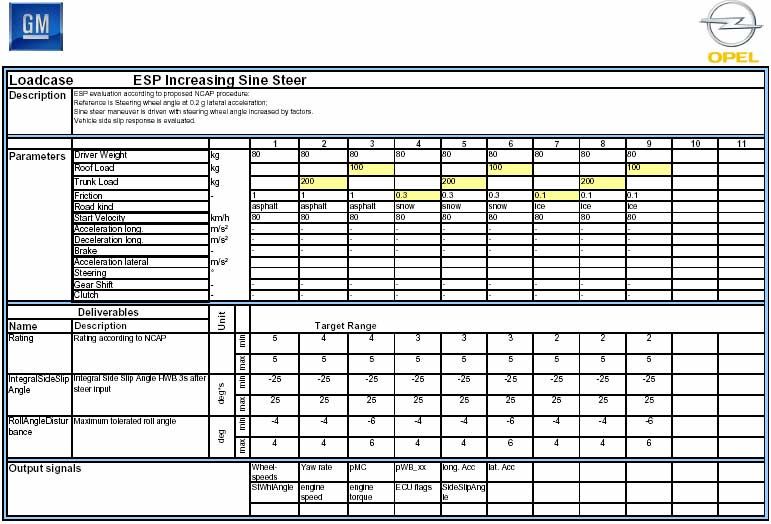
700 VDI-Berichte Nr. 1931, 2006 Testserien. Weitere Oberflächen (GUIs – Graphical User Interfaces) dienen der schnellen ad-hoc-Auswertung der Simulationen bzw. der Generierung von HTML-basierten Test- Reports. Bild 4: Benutzeroberfläche der Testautomatisierung zur Erstellung von Test-Serien Die automatisch generierten Reports mit unterschiedlichem Detaillierungsgrad ermöglichen eine umfassende Dokumentation von Entwicklungsständen der Regelsysteme bis hin zum Freigabestand. Grundlage der oben geschilderten Testserien ist ein definierter Fahrmanöver- katalog. Als Beispiel aus diesem Katalog ist in Bild 5 das Fahrmanöver „Increasing Sine Steer“ dargestellt.
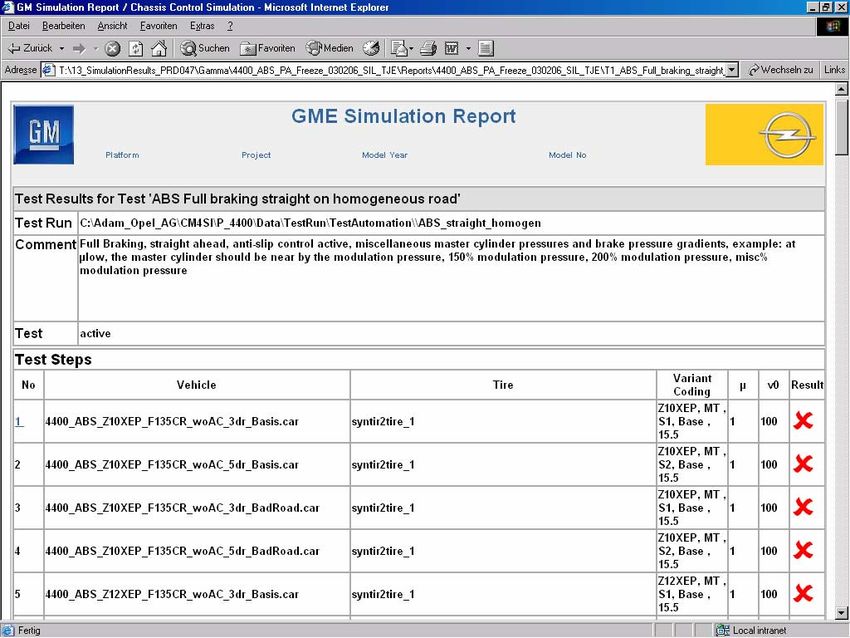
VDI-Berichte Nr. 1931, 2006 701 Bild 5: Auszug aus dem MS-Excel basierten Fahrmanöverkatalog (ein Fahrmanöver) Als gemeinsame Austauschplattform für Informationen zwischen Simulation und Fahrver- such, welche das dynamische Fahrzeugverhalten betreffen, hat sich eine MS-Excel basierte Darstellung bewährt. Zum einen können hier Randbedingungen für die Simulationsdurch- führung, wie Fahrzeugbeladung, Reibwert, Fahrzeuggeschwindigkeit etc. festgelegt werden. Zum anderen werden so die Zielgrößen und deren Zielbereich definiert. Eine automatisierte Einleseroutine gestattet die direkte Überführung aus Excel in die Testautomatisierung zur Erzeugung von Test-Serien. Bild 6 zeigt beispielhaft einen HTML-basierten Test-Report. Die in mehrere Detaillierungs- ebenen gegliederten Reports zeigen auf der Haupt-Ebene (Haupt-Dokument) die Zusam- menfassung der Test-Serie inklusive der Resultate auf einen Blick. Bei Bedarf ist es möglich, sich einzelne Mess-/Simulationsgrößen als Zeitverlauf anzusehen, da diese als Bild in einer tieferen Ebene im HTML-Report gespeichert werden.

702 VDI-Berichte Nr. 1931, 2006 Bild 6: HTML-Test-Report (links Hauptebene, rechts Unterebene) 4. Validierungsergebnisse Die Validität der beschriebenen Vorgehensweise zur Erteilung einer Freigabeempfehlung soll beispielhaft anhand der nachfolgend dargestellten Validierungsergebnisse (Bilder 7 und 8) gezeigt werden. Eine solche, im Laufe der Entwicklung ständig wiederholte Validierung ein- zelner charakteristischer Fahrmanöver dient zur Grundabsicherung der Simulation. Da im referenzierten Fahrzeugprojekt die Simulation bereits entwicklungsbegleitend arbeitet, ergibt sich im Laufe der Zeit eine Konvergenz der Simulationsgüte gegen die Realität im Sinne einer ständigen Genauigkeitssteigerung. Hierbei spielt insbesondere die Verfügbarkeit von genauen und verlässlichen Informationen über die technischen Daten der Einzelkomponen- ten der Entwicklungsfahrzeuge eine große Rolle. Die Bilder 7 und 8 zeigen die Druckverläufe der Radzylinderbremsdrücke bzw. die Verläufe der Radgeschwindigkeiten über der Zeit bei einer Vollbremsung auf unterschiedlichen Reib- werten (μ-split).

VDI-Berichte Nr. 1931, 2006 703
pressure FR [bar]
pressure FL [bar]
Hauptbremszylinderdruck
20 22 24 26 20 22 24 26
Simulation
Measurement
pressure RR [bar]
pressure RL [bar]
20 22 24 26 20 22 24 26
Time [s] Time [s]
Bild 7: Druckverläufe an den 4 Radbremszylindern bei einer μ-split-Bremsung (links: μ-low)
Für diese Vergleichssimulation wurde der vom Fahrer erzeugte Hauptzylinderbremsdruck als
Eingangsgröße verwendet, während der IPG-Driver in der Simulation die Quersteuerung des
Fahrzeugs übernahm.
WheelSpd FR [kph]
WheelSpd FL [kph]
60 60
40 40
20 20
0 0
20 22 24 26 20 22 24 26
Simulation
Measurement
WheelSpd RR [kph]
WheelSpd RL [kph]
60 60
40 40
20 20
0 0
20 22 24 26 20 22 24 26
Time [s] Time [s]
Bild 8: Geschwindigkeitsverlauf der vier Räder bei einer μ-split-Bremsung
Es ist offensichtlich, dass die Radgeschwindigkeiten durch die Simulation sehr gut abgebildet
werden. Großen Einfluss auf die Simulationsgüte hat dabei die Qualität der verwendeten
Hydraulik- und Reifenmodelle.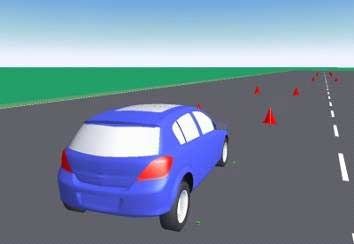
704 VDI-Berichte Nr. 1931, 2006
5. Zusammenfassung und Ausblick
In einem aktuellen Fahrzeugprojekt hat sich der Einsatz der Road-Lab-Math Strategie durch
Reduktion der Prototypenfahrzeuge in verschiedenen Entwicklungsstadien und den damit
verbundenen Kosteneinsparungen bewährt.
Aufgrund der bereits in einem relativ überschaubaren Fahrzeugprojekt existierenden
Variantenvielfalt zeigt sich, dass eine Testautomatisierung zum Abfahren umfangreicher
Testszenarien unbedingt erforderlich ist. Ohne sie wäre eine simulationsbasierte Freigabe-
empfehlung der ABS-/ESP-Software bzw. deren Parametersätze nicht möglich. Im Rahmen
von entwicklungsbegleitenden Validierungssimulationen unter Verwendung der aufgebauten
Prototypenfahrzeuge wird die erreichte Simulationsqualität permanent überprüft.
Einschränkend ist allerdings zu erwähnen, dass sich die erzielten Ergebnisse auf einen
definierten Satz von Standardmanövern beschränken. Diese Simulationen können die Basis-
arbeit bei der Entwicklung eines Fahrwerkregelsystems unterstützen, keinesfalls jedoch zur
Zeit die subjektiven Fahreindrücke eines erfahrenen Testfahrers bei der Bewertung des
Gesamtsystems im Fahrzeug ersetzen. Hierzu sind weitere Arbeiten zur Objektivierung
subjektiver Fahreindrücke und dem Herausarbeiten geeigneter Testszenarien und Beur-
teilungsgrößen notwendig.
6. Literatur
[1] Klein, A.; Hiemenz, R.; Kemmler, F.: Ganzheitliche Entwicklungsmethodik zur Optimie-
rung der Fahrstabilität. Haus der Technik, Essen, 20.+21. September 2001
[2] Hiemenz, R.; Klein, A.: Interaktion von Fahrwerkregelsystemen im Integrated Chassis
Control (ICC). Tag des Fahrwerks, Institut für Kraftfahrwesen Aachen, 7. Oktober 2002
[4] Holzmann, H.; Hiemenz, R.: Einsatz moderner Simulationsverfahren bei der Entwick-
lung von vernetzten Fahrwerkregelsystemen am Beispiel Integrated Chassis Control
(ICC). Tagung „Fahrwerktechnik“, Haus der Technik, München, 03.+04. Juni 2003
[5] Holzmann, H., Hahn, K.-M.: Einsatz von HiL-Simulation im Entwicklungsprozess von
modernen Fahrwerkregelsystemen am Beispiel Integrated Chassis Control (ICC).
VDI-Tagung AUTOREG 2004, Wiesloch, 02.+03. März 2004
[6] Kochem, M., Holzmann, H.: Virtuelle Entwicklung von Fahrwerkregelsystemen am
Beispiel des IDSplus Fahrwerks im neuen OPEL Astra. VDI-Tagung Berechnung und
Simulation im Fahrzeugbau, Würzburg, 29.+30. September 2004Sie können auch lesen