NEUE EINSATZMÖGLICHKEITEN VON ROBOTERSYSTEMEN DURCH INTUITIVE GENERALISIERTE PROGRAMMIERUNG - PROF. DR.-ING. RAINER MÜLLER ZEMA GGMBH, SAARBRÜCKEN ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Neue Einsatzmöglichkeiten von
Robotersystemen durch intuitive
generalisierte Programmierung
Prof. Dr.-Ing. Rainer Müller
ZeMA gGmbH, Saarbrücken
Graz, 29.05.2018
Seite 1
Zahlen und Fakten des ZeMA -
Zentrum für Mechatronik und Automatisierungstechnik
n Gegründet 2009 Geschäftsführung
wissenschaftlich kaufmännisch
n Unsere Gesellschafter sind
– Saarland mit 60%
– Universität des Saarlandes mit 20%
– Hochschule für Technik und Wirtschaft
mit 20%
n Mitarbeiter: Prof. Dr.-Ing. Dipl.-Wirtsch.-Ing.
Rainer Müller Andreas Noss
aktuell ca. 120 Mitarbeiter/-innen
Seite 2
Aufstellung des
Zentrums für Mechatronik und Automatisierungstechnik
Forschungsbereiche Geschäftsfelder
Sensoren und Fertigungs- Montage- Automotive Production Research
Aktoren verfahren und prozesse und
-automatisierung -automatisierung Power 4 Production
Robotix Academy
Montagesystemtechnik und Roboter und Inbetriebnahmeprozesse
Anlagenplanung Handhabungstechnologien in der Montage
Am ZeMA ist zudem ein Mittelstandszentrum rund um Themen aus Industrie 4.0 aktiv
Seite 3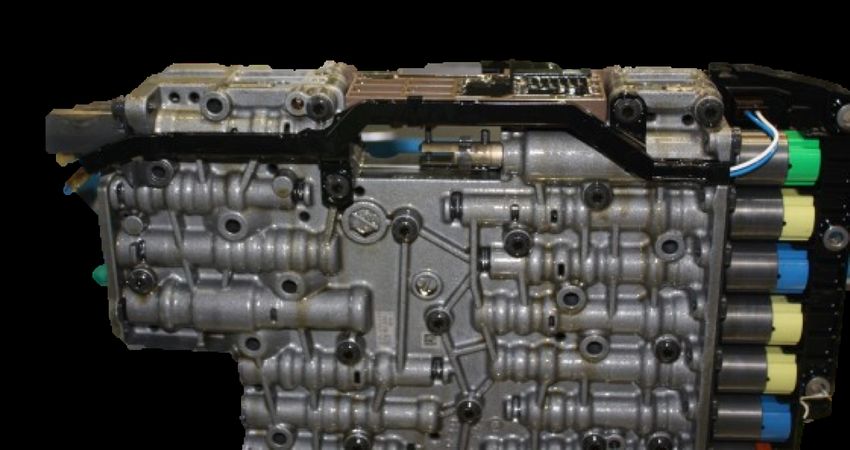
Es gibt eine Vielzahl von äußeren und inneren Einflüssen auf
Unternehmen, die sich insbesondere auf die Produktion einwirken
Umwelt /
Wettbewerbsfähigkeit Ressourcenlage
Produktvielfalt
Technologischer Fortschritt Schnelle
und neue Prozesse Reaktionsfähigkeit
Mitarbeiterqualifikation
Wandlungstreiber verursachen Problemstellungen und Herausforderungen, die die Unternehmen
beherrschen müssen, um im Wettbewerb erfolgreich zu sein.
Seite 4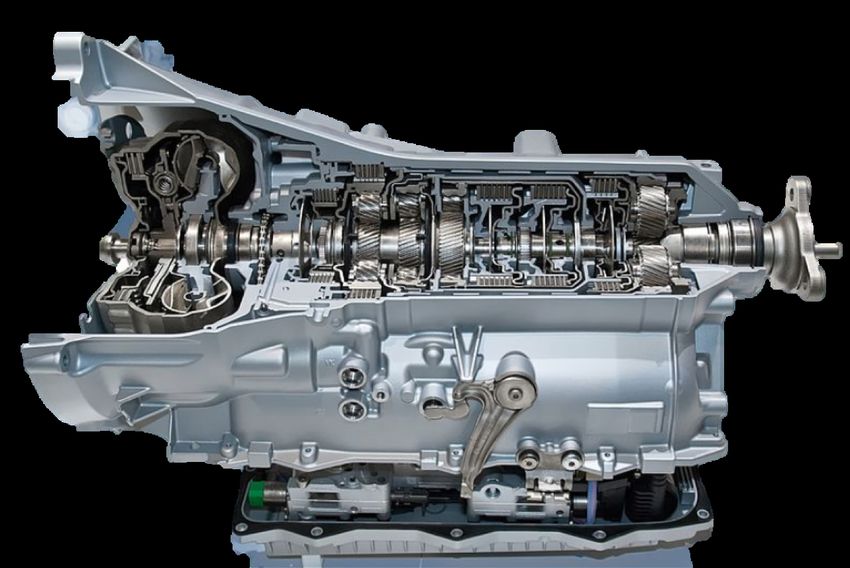
Ein Applikationsbeispiel existiert im Sondermaschinenbau bei der
Automatisierung von Schweißprozessen
n Der Schweißprozess ist durch viele verschiedene
Tätigkeiten geprägt:
– Bauteil heften
– Bauteil vorbereiten (Abkleben, Abdichten…)
– Schweißprozess durchführen
n Unternehmen wünschen sich flexible und automatisierte
Robotersysteme, aber
– nicht jede dieser Tätigkeiten eignet sich für automatisierte
Prozesse
– im Sondermaschinenbau gilt: First-Part-Right
– zur Bedienung und Programmierung neuer Robotersysteme
werden oft umfangreiche Programmierkenntnisse benötigt,
die bei vielen Unternehmen nicht vorhanden sind.
Es existiert ein Bedarf für intelligente assistierte Programmier- und Bedienkonzepte, die insbesondere
auf die Bedürfnisse von kleinen und mittleren Unternehmen zugeschnitten sind.
Seite 5
Ziel: Von der Planung bis zum Betrieb soll der Mensch intelligent
unterstützt werden
Bedienanforderungen Funktionsanforderungen
n Intuitiv n Generalisiert
n Individualisierbar n Vernetzbar
n… n…
Assistenz
Planung Re-/Konfiguration Betrieb
n Absicherung n Betriebsmittel n Qualifikation
der Montage-
n Organisation n Werkerführung
fähigkeit
Der Einsatz von Assistenz hat unterschiedliche Ausprägungen und ermöglicht es Mitarbeiter in den
verschiedenen Umsetzungsphasen zu unterstützen.
Seite 6
Im Kontext von Industrie 4.0 entstehen neue Prozesse und
Technologien zur Unterstützung des Menschen
Bedienelemente Roboterinteraktion
Spracheingaben/
Visualisierung
Gesten
Smart Devices
Mensch-Technik-
Interaktion
Produktion
The project „Modularity, Safety, Usability, Efficiency by Human-Robot-Collaboration – FourByThree“ has received funding from the European Union’s Horizon 2020 research and innovation program under grant agreement nº 637095.
Seite 7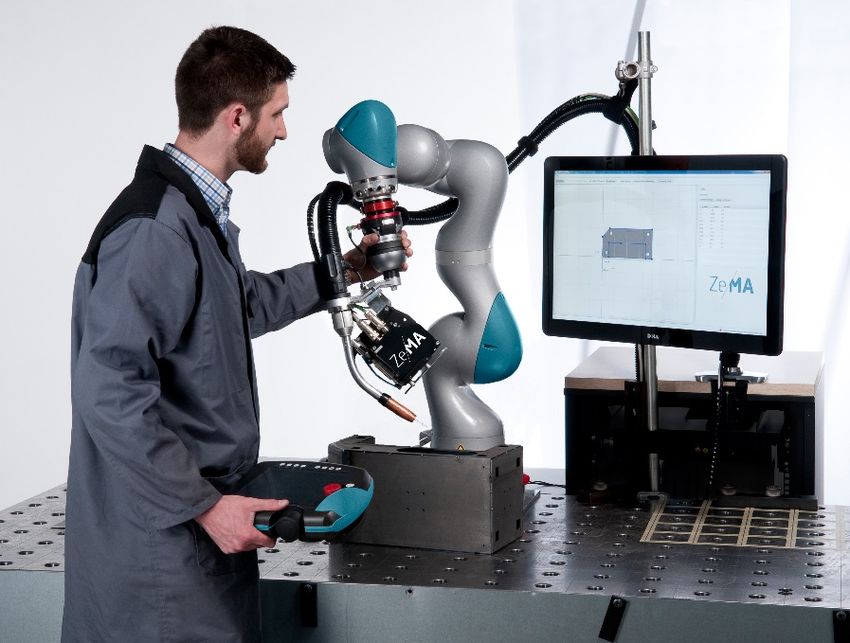
Auch kooperationsfähige Robotersysteme ermöglichen neue
Arbeitsformen im Produktionsumfeld
Konventionell Autark / Synchronisiert Kooperation Kollaboration
Koexistent
Intensität der Interaktion
Der Mensch und der Roboter arbeiten zukünftig vermehrt zusammen
Ziel ist es die Fähigkeiten des Menschen und des Roboters optimal zu kombinieren
Seite 8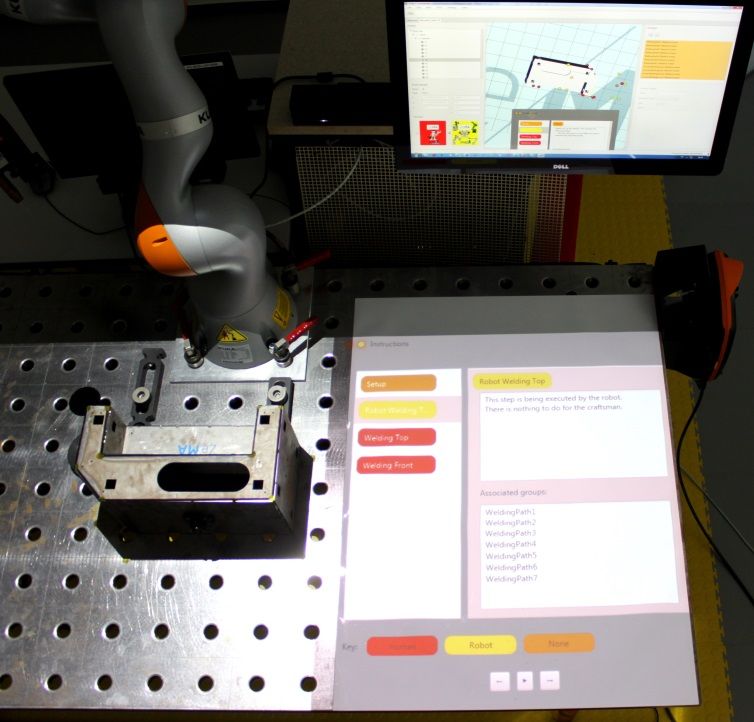
Konzept eines teilautomatisierten Robotersystems für den
Fügeprozess am Beispiel Schweißen
Bedienkonzept
Sicherheit Flexibles Robotersystem
Manipulator Steuerung Messkonzept Werkzeugaufnahme Arbeitsplatzgestaltung
Ein intelligentes generalisiertes Bedienkonzept muss auf die Bedürfnisse von KMU zugeschnitten sein
Seite 9
Was versteht man unter der intuitiven Bedienung eines
Robotersystems?
n An die Fähigkeiten der Mitarbeiter angepasste
Bedienkonzepte und Schnittstellen
n Planungswissen muss einfach eingebracht werden
können
n Der Werker behält zu jeder Zeit die Kontrolle über das
System
n Prozessfachwissen der Werker kann bei der Bedienung
des Robotersystems genutzt werden
n Bedient wird nicht nur der Roboter sondern das System
n Das Bedienkonzept vereinfacht die Inbetriebnahme und
verkürzt die Rüstzeiten bei Produktwechsel
Das intuitive Bedienkonzept eines teilautomatisierten Robotersystems wird individuell an die
Anforderungen der Montagestation angepasst.
Seite 10Planungs- und Bedienkonzept für z.B. einen Schweißarbeitsplatz
Mensch-
Planung + Virtuelles Konfigu- Prozess
Maschinen- Eingabe
Entwicklung Model ration Abdichten
Schnittstelle
§ CAD Daten § Produkt- § Projektion und § Visualisierung § Anpassen von § Anrücken
auswerten informationen Einmessen der der Aufgaben Roboterbahnen
§ Einmessen
Lagen und
§ Dynamische § Roboterbahn § Applikation
Koordinaten- § Schweißen
Aufgaben- freigeben
systeme § Arbeitsfolge
planung der
AFO
MRK
Seite 11Festlegen von wesentlichen Merkmalen in der Konstruktion
Plug In für n Wesentliche Merkmale der Schweißkonstruktion:
Konstruktionsprogramm
– Anlegen der Schweißanweisung (WPS)
Definieren der – Definition des Schweißtyps
Aufgaben im CAD
n In der Arbeitsvorbereitung müssen die Tätigkeiten
Fähigkeitsorientiert zugeordnet werden. Z.B.:
– Einrichten der Zelle ->Mitarbeiter
– Vorbereitung des Bauteils -> Mitarbeiter
Zuordnung Mensch
oder Roboter
– lange geradlinige Schweißnähte -> Roboter
– kurze Schweißnähte und Ecken -> Mitarbeiter
n Entsprechend der Auswahl wird eine Zellen-
Konfiguration erzeugt: Arbeitsplan, Werker-
anweisungen und Roboterprogramm
Grunddaten für
Roboterprogramm
Seite 12Konfiguration der Roboterzelle: Projektion der Basiskoordinaten und
globales Einmessen der Betriebsmittel
n Projektion zur visuellen
Assistenz bei der
Anordnung von
Betriebsmitteln
n Einmessen der
Betriebsmittel und
Berechnung der realen
Position
n Rückführung der
Messdaten an die
Simulation und Anpassung
der Simulation an die
Realität
n Kontrollprojektion als
visuelle Assistenz für den
Mitarbeiter
Seite 13Anpassung der Programmierung auf dem Hallenboden durch
regionale Posekorrektur
n Anpassung der Roboterbahn
– Abgleich der geplanten Roboterbahn und der Realität
durch den Mitarbeiter an der Station
– Einpflegen neuer Varianten oder Bahnkorrektur durch
einfache Anpassung der Stützpunkte z.B. Maus oder
Gestensensoren
– Keine Programmierkenntnisse erforderlich
n Visualisierung der Aufgabenteilung direkt auf dem
Bauteil durch Projektionssystem
n Anzeigen der Arbeitsanweisung im Arbeitsbereich des
Mitarbeiters
Seite 14Lokale Onlinekorrektur der Schweißnaht durch einen Sensor
n Anzeige der Schweißnaht durch
ein Projektionssystem auf dem
Bauteil
n Die Genauigkeit der Projektion
und Anpassung durch den Werker
sind nicht ausreichend.
n Ein Messsystem muss dem
Schweißprozess vorlaufen, um
Toleranzuntersuchung den genauen Verlauf der
Schweißnaht zu identifizieren.
n Die Roboterbahn wird
entsprechend des Nahtverlaufs
korrigiert.
optisches Schweißnahtverfolgungssystem
Linienlaser
Seite 15Zusatzbeispiel: Potenzial einer Mensch-Roboter-Kooperation in der
Elektronik-, Hydraulik- und Pneumatik-Montage
Produkt ZF - 8 HP
Quelle: zf.com
Seite 16Intuitives Bedienkonzept mit visuellen Assistenzfunktionen durch
einen Digitalprojektor
Technologieansatz:
n Visuelle Assistenz und Prüfung der Arbeitsschritte mit
einem Projektionssystem
n Einlernen einer weiteren Produktvariante ohne
Programmierung
n Intuitive Bedienung durch den Einsatz von
Gestensteuerung und kapazitiver Sensorik
Vorteile:
üErhöhung der Direktläuferquote in einer variantenreichen
Montagestation durch direkte Werkerführung und
Überprüfung der Arbeitsschritte
üVerkürzung der Programmierzeiten durch Musterleisten
und dynamischer Anpassung der Arbeitsschritte
Seite 17Intuitives Bedienkonzept mit visuellen Assistenzfunktionen durch
einen Digitalprojektor
Projektionsfelder
Musterleiste
Fügeposition am Produkt Fehlerfall „Stift fügen“
„Pick by Light“
Seite 18Herzlichen Dank für Ihre
Aufmerksamkeit!
Prof. Dr.-Ing. Rainer Müller
ZeMA - Zentrum für Mechatronik und
Automatisierungstechnik gemeinnützige GmbH
Eschberger Weg 46
D-66121 Saarbrücken
Tel +49 (0) 6 81 - 85 787 - 15
Mail rainer.mueller@zema.de
Seite 19Im Kontext von Industrie 4.0 entstehen Technologien zur
Unterstützung des Menschen im Umfeld der Produktion
Roboter – und Assistenzsysteme Mixed Reality
entlasten den Mitarbeiter
Apps
Tablets
Datenbrillen
Smart Devices versorgen den Mitarbeiter
mit relevanten Informationen
Bildquellen: produktion.de, wearear.de, stockcreatorblog.de, Universal Robot, Fanuc, Bosch, Kuka
Seite 20Der Mensch und der Roboter arbeiten zukünftig vermehrt zusammen
Mensch Roboter
Fähigkeiten
Mensch-Roboter-Kooperation
+ Hohe Flexibilität + Hohe Qualität
+ Lernfähigkeit + Hohe Lasten
+ Anpassungsfähig + Monotone Massenproduktion
+ Mobilität
Ziel ist es die Fähigkeiten des Menschen und des Roboters optimal zu kombinieren.
Seite 21Sie können auch lesen

















































