Interreg I-AT Highlights - Interregional Automated Transport - I-AT Interreg Automated Transport
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Highlights Interreg I-AT Interregional Automated Transport

Inhoudsopgave I-AT, Interregional Automated Transport I-AT, Interregional Automated Transport 5 WP 1: Veel ervaring opgedaan met technologie AP 1: Umfassende Erfahrungen mit Technologie gesammelt 9 I-AT Project ontwikkelt Mission-bus I-AT Projekt entwickelt Mission-Bus 11 Pilotproject op Airport Weeze Pilotprojekt am Airport Weeze 13 WP 2: Business case voor truckplatooning AP 2: Business Case Truck Platooning 15 Afstandsmeting bij ‘platoonende’ trucks Abstandsmessung bei ‘platoonenden‘ LKWs 17 Juridische aspecten van truckplatooning Rechtliche Aspekte des Truck Platoonings 19 Succesvol seminar over truckplatooning Erfolgreiches Seminar zu Truck Platooning 21 WP 3: Autonome voertuigen in het onderwijs AP 3: Automatisierte Fahrzeuge in der Ausbildung 23 Technova College neemt I-AT Shuttle over Das Technova College erhält I-AT Shuttle 25 WP 4: Living Lab Aachen-Vaals met OV-shuttle AP 4: Living Lab Aachen-Vaals mit ÖV-Shuttle 27 Routebeoordeling voor de Mission-bus Streckenbewertung für den Mission-Bus 29 Integratie van de movA-app in MaaS Integration der movA App in MaaS 31 Acceptatie en comfort van zelfrijdend vervoer Akzeptanz und Komfort vom autonomen Verkehr 33 Mission-bus presteert prima op Aldenhoven Erfolgreicher Einsatz Mission-Bus in Aldenhoven 35 WP 5: Kennis opdoen, verzamelen en delen AP 5: Wissen aufbauen, sammeln und teilen 37 Masterclass over automatische shuttles Masterclass automatisierte Shuttles 39 Pakketbezorging met elektrische transportfiets Paketzustellung mit Elektrofahrrad 41 Grensoverschrijdende netwerken en kennistransfer Grenzüberschreitende Netzwerke und Wissenstransfer 43

NL DE
I-AT, Interregional Automated Transport I-AT, Interregional Automated Transport Europäische Union
Europese Unie
Het Interreg-project ‘Interregional Automated Transport’ (I-AT) werd Das Interreg-Projekt ‘Interregional Automated Transport‘ (I-AT) wurde
in 2017 gestart om de ontwikkeling en de groei van innovaties op 2017 ins Leben gerufen, um die Entwicklung von Innovationen auf dem
het gebied van zelfrijdend vervoer voor de mobiliteits- en logistieke Gebiet des autonomen Fahrens für die Mobilitäts- und Logistikbranchen
sectoren in Gelderland, Noord-Brabant, Limburg en Noordrijn- in Gelderland, Nordbrabant, Limburg und Nordrhein-Westfalen zu
Westfalen te stimuleren. In het project werkten 20 partners uit stimulieren. Im Projekt arbeiteten 20 Partner aus Bildung, Forschung,
overheid, onderwijs, onderzoek, bedrijfsleven en openbaar vervoer öffentlichen Verkehrsunternehmen, staatlichen Einrichtungen und
uit het Nederlands-Duitse grensgebied samen. Unternehmen aus dem deutsch-niederländischen Grenzgebiet zusammen.
Het doel van het I-AT project was zelfrijdend en grensoverschrijdend Das Ziel des Projekts war es, automatisierten - und soweit möglich
vervoer van personen en goederen in de praktijk te bestuderen grenzüberschreitenden - Verkehr für Personen und Güter in der Praxis
en te testen. De projectpartners werkten aan de ontwikkeling zu untersuchen und zu testen. Die Projektpartner arbeiteten dazu an der
van prototypen en de uitvoering van pilotprojecten om kennis te Entwicklung von Prototypen und der Durchführung von Pilotprojekten in
vergaren, de randvoorwaarden en kansen voor zelfrijdend vervoer te der Region, um neue Erkenntnisse zu gewinnen, die Rahmenbedingungen
onderzoeken en de grensoverschrijdende toepassingsmogelijkheden und Möglichkeiten für den selbstfahrenden Verkehr zu untersuchen und
te verbeteren. grenzüberschreitende Anwendungsmöglichkeiten zu fördern.
Concreet heeft het project onder meer geresulteerd in een Konkret hat das Projekt unter anderem zur Entwicklung eines
pilotproject met zelfrijdende shuttles op Weeze Airport; de integratie Pilotprojekts mit automatisierten Shuttles am Flughafen Weeze
van autonoom rijden in de autotechniekopleiding van het Technova geführt, zur Integration des autonomen Fahrens in der Ausbildung für
College in Ede; de ontwikkeling van een MaaS-app; een aantal Fahrzeugtechnik des Technova College in Ede, zur Entwicklung einer
praktische onderzoeken naar de randvoorwaarden voor autonoom MaaS-App, einer Reihe praktischer Studien zu den Voraussetzungen
rijden en truckplatooning; een masterclass over autonoom rijden für autonomes Fahren und Truck Platooning, einer Masterclass über
en in de ontwikkeling van een nieuwe, autonoom rijdende bus, de automatisierte Shuttlebusse sowie zur Entwicklung eines neuen
Mission, die een uitgebreid testprogramma op het testcircuit van automatisierten Busses, des Mission, der auf der Teststrecke in
Aldenhoven (bij Aken) onderging. Aldenhoven (bei Aachen) ein umfangreiches Testprogramm durchlief.
Dit boekje vormt samen met een korte video de afsluiting van Dieses Buch fasst - zusammen mit einem kurzen Video - dieses Projekt
het project. Het geeft een overzicht van de highlights van het I-AT abschließend zusammen und bietet einen Überblick über die Highlights
project. Wij willen alle betrokkenen bedanken voor de plezierige en des I-AT-Projekts. Wir möchten allen Beteiligten für die angenehme und
constructieve samenwerking. konstruktive Zusammenarbeit danken.
Namens alle I-AT partners Im Namen der I-AT Partner
4 5
Overhandiging zelfrijdende I-AT shuttle
DE Overhandiging zelfrijdende I-AT shuttle
6 7
Veel ervaring opgedaan Umfassende Erfahrungen mit
met technologie Technologie gesammelt
Werkpakket 1 van het I-AT Project was verantwoordelijk Arbeitspaket 1 des I-AT-Projekts war für die Technologie
voor de technologie. De partners, die bij dit onderdeel verantwortlich. Die Partner, die an diesem Teil des
betrokken waren, begonnen met de verbetering Projektes beteiligt waren, begannen den mechanischen
van het mechanische gedeelte van de I-AT Shuttles, Teil der I-AT-Shuttles zu verbessern, die vom
die overgenomen waren van het Gelderse WEpod- gelderländischen WEpod-Projekt übernommen wurden.
project. Daarna werd gewerkt aan de ontheffing van Anschließend wurde auf die Ausnahmegenehmigung
het voertuig voor het rijden met passagiers op Duits für die Fahrzeuge hingearbeitet, um Fahrgästen auf
grondgebied. De grensoverschrijdende samenwerking deutschem Grundgebiet befördern zu dürfen. Diese
was uniek. Werkpakket 1 heeft vervolgens de stewards grenzüberschreitende Zusammenarbeit war einzigartig.
getraind en waar nodig tijdens de pilot in Weeze AP 1 trainierte auch die Stewards und leistete bei
technische ondersteuning gegeven. Bedarf technische Unterstützung während des
Pilotbetriebes in Weeze.
De ontwikkeling van de Mission-bus was een belangrijk
onderdeel van het I-AT Project. De Mission was een Die Entwicklung des Mission-Busses war ein wichtiger
totaal nieuw concept, dat geïnspireerd was op ervaring Bestandteil des I-AT-Projekts. Der Mission-Bus ist ein
met autonoom rijden in de praktijk. De Mission gaat völlig neues Konzept, inspiriert von Erfahrungen mit
bijvoorbeeld uit van de aanwezigheid van een steward, automatisiertem Fahren in der Praxis. Der Mission-Bus
die in geval van nood de besturing kan overnemen. wurde zum Beispiel bewusst auf die Anwesenheit eines
De Mission heeft bovendien veel meer zitplaatsen en Stewards hin entwickelt, der im Notfall jederzeit die
kan handbestuurd ook als een normale bus op de weg Steuerung übernehmen kann. Der Mission-Bus verfügt
rijden. über wesentlich mehr Sitzplätze und kann auch manuell
wie ein normaler Bus auf der Straße gefahren werden.
Ter voorbereiding van de pilot op een
grensoverschrijdend traject tussen Aachen en Vaals Zur Vorbereitung eines geplanten Pilotprojekts auf
werd een gedetailleerde inventarisatie gemaakt van de einer grenzüberschreitenden Route zwischen Aachen
route, de risico’s en de maatregelen die nodig waren und Vaals wurde eine detaillierte Inventarisierung
om het voertuig op de route te kunnen laten rijden. der Strecke, der Risiken und der erforderlichen
Voor de goedkeuring werd nauw samengewerkt met Maßnahmen durchgeführt, damit das Fahrzeug die
Overhandiging zelfrijdende I-AT shuttle TÜV Rheinland Intertraffic GmbH. Dat resulteerde Strecke sicher befahren könnte. Zur Vorbereitung
in een nieuwe visie op het testen, de functionele der Genehmigung wurde eng mit der TÜV Rheinland
DE Overhandiging zelfrijdende I-AT shuttle veiligheid en op algemeen toepasbare regels van InterTraffic GmbH zusammengearbeitet. Dies führte zu
autonome voertuigen, die op de openbare weg rijden. einer neuen Sichtweise auf Tests, funktionale Sicherheit
und allgemein anwendbare Regeln für automatisierte
Fahrzeuge, die auf öffentlichen Straßen fahren sollen.
8 9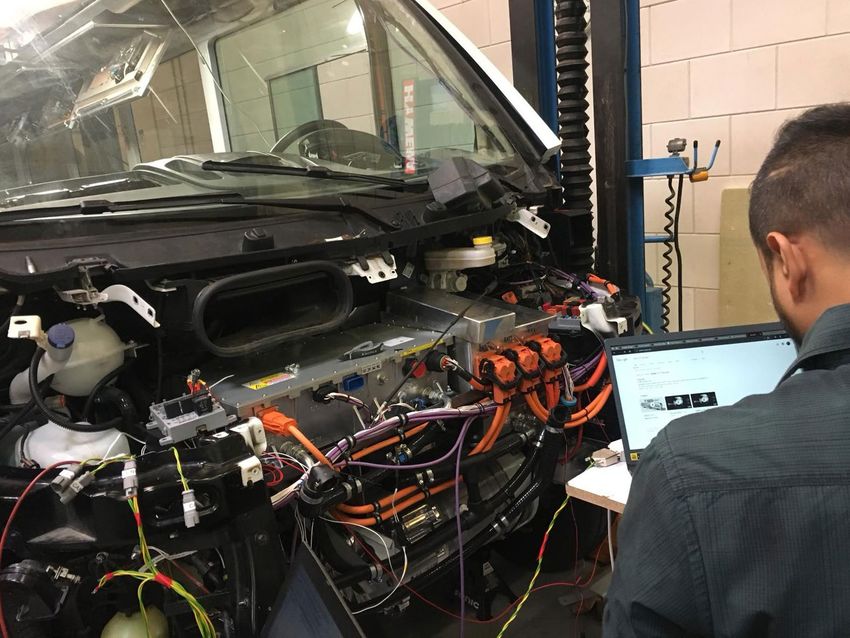
I-AT Project ontwikkelt Mission-bus I-AT Projekt entwickelt Mission-Bus
Een belangrijk onderdeel van het I-AT Project was Ein wichtiges Element des I-AT-Projekts war die
de ontwikkeling van de techniek voor een nieuw Entwicklung der Technik für ein neues, automatisiertes
autonoom rijdend voertuig: de Mission-bus. De basis Fahrzeug: des Mission-Busses. Das Fahrgestell eines
van de bus is het onderstel van een Fiat Ducato, waarop Fiat Ducato wurde als Basis für den Bus genutzt, auf das
een lichte, polyester carrosserie is gebouwd. De bus, eine leichte Polyester-Karosserie aufgebaut wurde. Der
die plaats biedt aan 12 passagiers, heeft een elektrische Bus bietet 12 Passagieren Platz und verfügt über einen
aandrijving met een accupakket. elektrischen Antrieb und ein Batteriepaket.
Der Mission ist ein ‘Dual Mode Bus‘. Das Fahrzeug
De Mission is een ‘dual mode bus’. Het voertuig kan op kann automatisiert auf festen, vordefinierten Routen
vaste, vooraf gedefinieerde routes autonoom rijden, fahren, kann aber auch von einem Fahrer auf
maar mag - omdat hij een kenteken heeft - ook met herkömmliche Weise auf öffentlichen Straßen gesteuert
chauffeur op de openbare weg rijden. De bus biedt werden. Im Vergleich zu anderen selbstfahrenden
vergeleken met andere zelfrijdende shuttles dus meer Shuttles bietet der Bus daher mehr Flexibilität, ein
flexibiliteit, een betere inzetbaarheid en een hogere breiteres Anwendungsspektrum sowie einen höheren
meerwaarde voor het personenvervoer. Verkehrsmehrwert.
Voor het autonoom rijden is de bus uitgerust met drie Für automatisiertes Fahren ist der Bus mit drei
systemen voor Automated Driving (AD), die gebruik AD-Systemen (Automated Driving) ausgestattet, die
maken van sensoren en computertechnologie. De Sensoren und Computertechnologie verwenden. Der
bus heeft een GNSS-systeem voor positiebepaling Bus verfügt über ein GNSS-System zur Positionierung.
met behulp van satellietpeilingen. Daarnaast worden Zusätzlich werden Kameras verwendet, mit denen
camera’s gebruikt waarmee de bus belijning op de weg der Bus der Fahrbahnmarkierung auf der Straße
kan volgen. De bus is bovendien uitgerust met lidar- folgen kann. Der Mission ist außerdem mit Lidar- und
en radarsystemen om objecten rond de bus waar te Radarsystemen ausgestattet, um Objekte rund um
nemen en daarop te kunnen reageren. Met behulp van den Bus zu erkennen und darauf reagieren zu können.
deze systemen kan de bus met een snelheid van dertig Mit Hilfe dieser Systeme kann der Bus mit einer
kilometer per uur autonoom over een traject rijden. Geschwindigkeit von bis zu 30 Stundenkilometern
automatisiert eine vorgegebene Route fahren.
Dankzij de drie AD-systemen is de Mission-bus een
Overhandiging
De Mission is een
zelfrijdende
‘Dual ModeI-AT
Bus’
shuttle uniek en innovatief platform, dat ingezet kan worden Dank der drei AD-Systeme ist der Mission-Bus
voor onderzoeks- en pilotprojecten op het gebied van eine einzigartige und innovative Plattform, die
Der Mission ist ein zelfrijdende
DE Overhandiging ‘Dual Mode I-AT
Bus’shuttle autonoom rijden. für Forschungs- und Pilotprojekte im Bereich des
automatisierten Fahrens eingesetzt werden kann.
10 11
Pilotproject op Airport Weeze Pilotprojekt am Airport Weeze
Tijdens het I-AT Project heeft een I-AT Shuttle als Im Rahmen des I-AT-Projekts war ein I-AT Shuttle im
onderdeel van een Living Lab op Airport Weeze Living Lab Airport Weeze im Einsatz. Der I-AT-Shuttle
gereden. De geautomatiseerde Shuttle was het eerste war damit der erste automatisiert fahrende Shuttle auf
autonoom rijdende voertuig op de openbare weg in öffentlichen Straßen in Nordrhein-Westfalen. Nach einer
Nordrhein-Westfalen. Na een intensieve voorbereiding intensiven Vorbereitung mit den Behörden in NRW, dem
in samenwerking met de overheden in NRW, de Straßenverkehrsamt und der Polizei des Kreises Kleve,
dienst openbare wegen, de politie, TÜV Nord en de dem TÜV Nord und der zuständigen Bezirksregierung
regioregering Düsseldorf, gaven verkeersminister Düsseldorf gaben der NRW-Verkehrsminister Wüst, die
Wüst van NRW, gedeputeerde Conny Bieze van de damalige Regionalministerin der Provinz Gelderland
Provincie Gelderland en burgemeester Francken van de Conny Bieze und der damalige Bürgermeister Francken aus
gemeente Weeze op 21 februari 2019 het startsein voor Weeze am 21. Februar 2019 den offiziellen Startschuss für
het pilotproject. das Pilotprojekt.
In de voorbereidingsperiode werden de beide geplande Während der Vorbereitungen wurden die zwei geplanten
routes gedetailleerd ingemeten en onderzocht. Op Routen detailliert eingemessen und untersucht. An
sommige punten werd de infrastructuur aangepast om einigen Stellen wurde die Infrastruktur angepasst, um die
de veiligheid van het wegverkeer te kunnen garanderen. Sicherheit des Straßenverkehrs zu gewährleisten.
Während des Praxis-Langzeittests, der bis Ende Oktober
In de testperiode, die tot eind oktober 2019 duurde, 2019 dauerte, wurden Passagiere zwischen dem Terminal
werden passagiers tussen de terminal en de und den Parkplätzen oder dem Hotel transportiert.
parkeerterreinen of het hotel vervoerd. In de shuttle Im Shuttle war immer ein Steward anwesend, der die
was een steward aanwezig die het functioneren van de Funktion des Shuttles und die Sicherheit überwachte.
shuttle en de veiligheid bewaakte. Tijdens het project Während des Projekts wurden Erkenntnisse und
werden kennis en ervaring verzameld die van belang Erfahrungen gesammelt, die für die Weiterentwicklung des
zijn voor de verdere ontwikkeling van autonoom rijden. automatisierten Fahrens wichtig sind: Nutzerakzeptanz,
Het ging om acceptatie door de gebruikers; gedrag Verhalten und Reaktionen anderer Verkehrsteilnehmer
en reacties van andere verkeersdeelnemers en de sowie die Herausforderungen bei der täglichen Nutzung
uitdagingen bij de dagelijkse inzet van shuttles op de solcher Shuttles auf öffentlichen Straßen.
openbare weg.
I-AT shuttle op Airport Weeze Zum Abschluss des Pilotbetriebs nahmen am 24. Oktober
Als afsluiting van de pilot waren op 26 september 2019 2019 rund 50 niederländische und deutsche Teilnehmer
I-At Shuttle am Airport Weeze zo’n 50 Nederlandse en Duitse deelnemers aanwezig op an einem Workshop am Flughafen Weeze teil, bei dem
een workshop op de luchthaven, waar de I-AT Partners die I-AT-Partner Erfahrungen zu Technologie, Projekten
ervaringen over techniek, automated driving projecten zum automatisierten Fahren und anderen Aspekten
en andere aspecten uitwisselden. austauschten.
12 13
Business case voor truckplatooning Business Case Truck Platooning
In Nederland en Duitsland was er de afgelopen jaren In den Niederlanden und in Deutschland wurde dem
veel aandacht voor het fenomeen truckplatooning. Thema Truck Platooning in den vergangenen Jahren
Er werden diverse test- en demonstratieprojecten viel Aufmerksamkeit geschenkt und es wurden
opgezet. Na de aanvankelijke hype nam de verschiedene Test- und Demonstrationsprojekte
belangstelling voor truckplatooning echter ook weer durchgeführt. Nach dem anfänglichen Hype ging das
net zo snel af en de grote vrachtwagenfabrikanten Interesse an Truck Platooning jedoch ebenso schnell
zetten hun projecten stop. De centrale vraag in zurück und die großen Lkw-Hersteller stellten ihre
Werkpakket 2 van het I-AT Project was dan ook: bestaat Projekte ein. Die zentrale Frage im Arbeitspaket 2
er wel een echte business case voor truckplatooning en lautete daher: Gibt es einen echten Business Case für
- zo ja - hoe ziet die er dan uit? Truck Platooning und - wenn ja - wie sieht dieser aus?
Om de vragen adequaat te kunnen beantwoorden, Um die Fragen adäquat zu beantworten, mussten
moest Werkpakket 2 terug naar de basis van die Partner aus Arbeitspaket 2 zurückgehen zu den
truckplatooning. Er werd onder meer onderzoek Grundlagen von Truck Platooning. Unter anderem
gedaan naar de rij-afstand tussen vrachtauto’s, de wurden der Sicherheitsabstand zwischen LKWs, der
GSM-ontvangst, de mogelijke brandstofbesparing GSM-Empfang, die möglichen Kraftstoffeinsparungen
en de beschikbare technische oplossingen voor het und die verfügbaren technischen Lösungen für den
wegtransport. Daarnaast werden de wettelijke en Einsatz im Straßenverkehr untersucht. Darüber hinaus
sociaal-economische randvoorwaarden in een rapport wurden die rechtlichen und sozioökonomischen
geïnventariseerd. Het grensoverschrijdende aspect Voraussetzungen in einem ausführlichen Bericht
speelde in al die onderzoeksvragen een hoofdrol, zodat inventarisiert. Der grenzüberschreitende Aspekt spielte
de gevolgen voor de veiligheid en de infrastructuur in bei all diesen Forschungsfragen eine zentrale Rolle,
zowel Duitsland als Nederland in kaart gebracht konden damit die Folgen für Sicherheit und Infrastruktur in
worden. Deutschland und in den Niederlanden herausgearbeitet
werden konnten.
Tijdens een goedbezochte en zeer interessante
workshop op 29 januari 2020 in Kleef werden Während eines gut besuchten und sehr informativen
de onderzoeksgegevens gepresenteerd aan Workshops am 29. Januar 2020 in Kleve wurden
vertegenwoordigers uit de politiek, de wetenschap en die Forschungsergebnisse Vertretern aus Politik,
Overhandiging zelfrijdende I-AT shuttle het bedrijfsleven. Helaas kon er op dat moment nog Wissenschaft und Industrie vorgestellt. Leider war es zu
geen eenduidig antwoord gegeven worden op de vraag diesem Zeitpunkt noch nicht möglich, eine eindeutige
DE Overhandiging zelfrijdende I-AT shuttle of er inderdaad een business case voor truckplatooning Antwort auf die Frage zu geben, ob es tatsächlich einen
is. De uitkomsten van het onderzoek wijzen echter wel Business Case für Truck Platooning gibt. Die Ergebnisse
op een aantal interessante mogelijkheden. der Studie weisen jedoch auf eine Reihe interessanter
Möglichkeiten auf.
14 15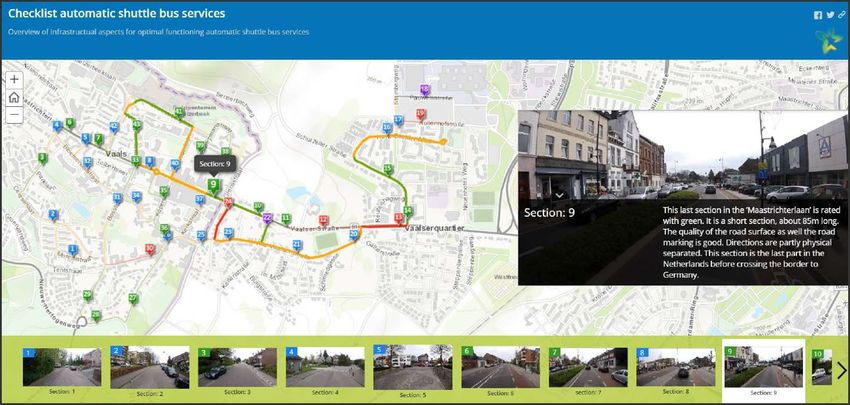
Afstandsmeting bij Abstandsmessung bei
‘platoonende’ trucks ‘platoonenden‘ LKWs
Als onderdeel van het onderzoek naar truckplatooning Im Rahmen der Untersuchung eines Business Cases
werd door V-Tron een test uitgevoerd, waarbij de für Truck Platooning wurde von V-Tron einen Test
afstand tussen twee ‘platoonende’ trucks op de durchgeführt, bei dem der Abstand zwischen zwei
snelweg gemeten werd. Doel was inzicht te krijgen ‘platoonenden’ LKWs auf der Autobahn gemessen
in het rijgedrag om de technologie te kunnen wurde. Ziel war es, Einblicke in das Fahrverhalten
optimaliseren. zu gewinnen, um so diese Technologie verbessern
zu können.
De test bestond uit het meten van de afstand van een
vrachtauto ten opzichte van de vrachtauto die voor Der Test bestand aus der Messung des Abstands
hem op de snelweg rijdt. Voor de test werd gebruik zwischen zwei hintereinander fahrenden LKWs auf
gemaakt van radar en een ‘Mobileye’ om onder alle der Autobahn. Für den Test wurden Radar und ein
omstandigheden correct het voorop rijdende voertuig ‘Mobileye‘ verwendet, um das vorausfahrende
te herkennen en de afstand te meten. Om de locatie Fahrzeug in allen Situationen korrekt erkennen und
van vrachtauto’s nauwkeurig te bepalen werden de die Entfernung messen zu können. Um den Standort
sensoren geïntegreerd met track- en tracesystemen. der LKWs möglichst genau zu bestimmen, wurden die
Sensoren mit Track & Trace-Systeme verknüpft.
Voor de test werden twee vrachtauto’s met de
Montage van de meetapparatuur in een vrachtauto sensoren uitgerust. Het bleek dat de gemiddelde Für den Test wurden zwei LKWs mit den Sensoren
snelheid van de twee vrachtauto’s tussen de 80 en ausgestattet. Es stellte sich heraus, dass die
Montage der Messgeräte in einem Lkw 90 km per uur lag. In het totaal zijn er tijdens de Durchschnittsgeschwindigkeit der beiden LKWs
pilot 12.000 afstandsmetingen met de eerste truck zwischen 80 und 90 km/h lag. Insgesamt wurden
uitgevoerd. Het merendeel van de metingen kwam uit mit dem ersten LKW während des Piloten 12.000
rond de 65 meter. Met de tweede truck zijn ongeveer Entfernungsmessungen durchgeführt. Die meisten
7.000 afstandsmetingen uitgevoerd, waarbij de Messungen kamen aus rund 65 Metern Entfernung.
gemiddelde afstand rond de 55 meter lag. Mit dem zweiten LKW wurden etwa 7.000
Entfernungsmessungen durchgeführt, wobei die
Voor de beide trucks gold dat 70% van de meisten Messungen etwa 55 Meter betrugen.
afstandsmetingen tussen de 45 en 105 meter lag. De
metingen hebben interessante data opgeleverd. Het Bei beiden LKWs lagen 70% der Messungen zwischen
vaststellen van de ideale afstand tussen ‘platoonende’ 45 und 105 Metern. Die Messungen haben interessante
vrachtauto’s kan leiden tot een brandstofbesparing Daten ergeben. Die Bestimmung des idealen
van 5 tot 15%. Abstands zwischen ‘platoonenden‘ LKWs kann zu
Kraftstoffeinsparungen von 5 bis 15% führen.
16 17
Juridische aspecten van Rechtliche Aspekte des Truck
truckplatooning Platoonings
Uitgangspunt voor het onderzoek naar de juridische Ausgangspunkt dieser Untersuchung war ein Dokument
randvoorwaarden voor truckplatooning in Werkpakket über die Einrichtung des ‘Living Lab Platooning Trucks‘.
2 was de opzet voor het ‘Living Lab Platooning Trucks’. Die darin formulierten rechtlichen Herausforderungen
De daarin geformuleerde juridische uitdagingen waren waren entscheidend für die Entwicklung künftiger Truck
doorslaggevend bij de ontwikkeling van toekomstige Platooning-Szenarien, da die Gesetzgebung derzeit
scenario’s voor truckplatooning. Op dit moment biedt wenig Spielraum für den Aufbau eines realistischen
de wetgeving namelijk weinig speelruimte om een Business Cases bietet. Beispielsweise ist es derzeit
realistische business case te bouwen. Het is momenteel rechtlich nicht möglich die hinteren Fahrzeuge ohne
bijvoorbeeld juridisch gezien niet mogelijk om de Fahrer fahren zu lassen.
achterste voertuigen zonder chauffeur te laten rijden.
Basierend auf dieser Realität wurde untersucht,
Uitgaande van deze realiteit is onderzocht welke welche Szenarien sinnvoll sein könnten. Die
scenario’s zinvol kunnen zijn. De scenario’s Szenarien wurden aus technisch-wirtschaftlicher
werden vanuit technisch-economisch en juridisch sowie rechtlicher Perspektive betrachtet, wobei
perspectief bekeken, waarbij de nadruk lag op der Schwerpunkt auf der Fahrzeugautomatisierung
voertuigautomatisering en netwerkinfrastructuur. und der Netzwerkinfrastruktur lag. Auf diese
Zo kon een scenario ontwikkeld worden, dat Weise konnte ein Szenario entwickelt werden,
aanpassing van het juridische kader vereist, maar das eine Weiterentwicklung der rechtlichen
geen fundamentele ingrepen in de regelgeving. In dit Rahmenbedingungen forderte, jedoch ohne
scenario wordt het voorste voertuig door een chauffeur grundlegenden Änderungen der Gesetzesgrundlagen.
bestuurd en rijden de volgauto’s zonder chauffeur. In diesem Szenario wird das vorderste Fahrzeug von
Er is dan evenmin een chauffeur voor de veiligheid einem Fahrer gesteuert, während die Folgefahrzeuge
aan boord. ohne Sicherheitsfahrer auskommen.
De volgauto’s zijn met behulp van Cooperative Die Folgefahrzeuge werden mittels Cooperative
Adaptive Cruise Control (CACC) met het eerste Adaptive Cruise Control (CACC) mit dem ersten
voertuig verbonden. De chauffeur wordt door een Fahrzeug verbunden. Der Fahrer wird von einem
Platooning Service Provider (PSP) ondersteund die Platooning Service Provider (PSP) unterstützt, der den
de route bewaakt en in noodgevallen de besturing Zustand der Strecke überwacht und im Notfall per
van de volgauto’s op afstand veilig kan overnemen. Fernsteuerung die Kontrolle über die Folgefahrzeuge
Truckplatooning wordt dan alleen op vooraf sicher übernehmen kann. Truck Platooning ist dann
geselecteerde en daarvoor geschikte snelwegen nur auf vorausgewählten und geeigneten Autobahnen
toegestaan. zulässig.
18 19Succesvol seminar over Erfolgreiches Seminar zu
truckplatooning Truck Platooning
Op woensdag 29 januari 2020 organiseerde Werkpakket Am Mittwoch, dem 29. Januar 2020, organisierte
2 in het Euregio Forum in Kleef de workshop Arbeitspaket 2 im Euregio-Forum in Kleve den Workshop
‘Truckplatooning en de vraag: Is er een business case?’. “Truck Platooning und die Frage: Gibt es einen Business
Daarin werden de uitkomsten van twee onderzoeken Case?”. Darin wurden die Ergebnisse zweier Studien zu den
naar de randvoorwaarden voor truckplatooning Voraussetzungen für Truck Platooning vorgestellt. Der gut
gepresenteerd. De goed bezochte workshop leverde besuchte Workshop führte zu einer Reihe interessanter
een aantal interessante artikelen in de vakpers op. Artikel in der Fachpresse.
IKEM en BBH gingen tijdens de workshop in op de Während des Workshops diskutierten IKEM und BBH die
wettelijke randvoorwaarden voor truckplatooning. rechtlichen Voraussetzungen für das Truck Platooning.
De uitkomsten zijn vastgelegd in het rapport Die Ergebnisse wurden im Bericht ‘Truck Platooning in
‘Truckplatooning in Duitsland en Nederland. Status quo Deutschland und den Niederlanden - Status quo und
en rechtsgrondslagen’. De inventarisatie omvatte onder Rechtsgrundlagen‘ beschrieben. Er umfasste unter
meer de toelating van autonoom rijdende vrachtauto’s, anderem die Zulassung von automatisierten LKWs sowie
aansprakelijkheid en arbeidsrecht. De conclusie was das Haftungs- und Arbeitsrecht. Fazit war, dass es streng
dat er strikt formeel gezien geen rechtsgrondslag voor formal keine Rechtsgrundlage für Truck Platooning und
truckplatooning en autonoom rijden bestaat, omdat de autonomes Fahren gibt, da die Gesetzgebung immer noch
wetgeving nog steeds uitgaat van een chauffeur, die zelf einen Fahrer voraussetzt, der selbst aktiv am Verkehr
actief aan het verkeer deelneemt. teilnimmt.
HAN en V-Tron presenteerden de uitkomsten van twee HAN und V-Tron präsentierten die Ergebnisse zweier
praktische onderzoeken. Een ervan had betrekking op praktischer Studien. Eine davon bezog sich auf den
de afstand tussen de vrachtauto’s in een truckplatoon. Abstand zwischen den Trucks in einem Platoon. Der
De ‘zuigende’ werking van de vrachtauto’s kan een ‘Windschatten-Effekt‘ kann zu einer Kraftstoffeinsparung
brandstofbesparing van 5 tot 15 % opleveren. Uit von 5 bis 15% führen. Untersuchungen zum mobilen
onderzoek naar de mobiele data-uitwisseling en de Datenaustausch und dem Roaming-Gap beim Wechsel
roaming gap bij het wisselen tussen mobiele netwerken, zwischen Mobilfunknetzen haben gezeigt, dass
bleek dat er vertragingen van gemiddeld 4 seconden, Verzögerungen von durchschnittlich 4 Sekunden, aber
maar ook pieken van 8 minuten kunnen ontstaan. auch Spitzen von 8 Minuten auftreten können.
Werkpakket 2 concludeerde dat truckplatooning - met Die Partner im Arbeitspaket 2 kamen zu dem Schluss,
de juiste wettelijke kaders en de juiste technologie - dass Truck Platooning - mit den richtigen rechtlichen
zeker perspectief biedt voor de optimalisering van het Rahmenbedingungen und der richtigen Technologie
wegtransport. - sicherlich eine Perspektive für die Optimierung des
20 Straßenverkehrs bietet. 21Autonome voertuigen in het onderwijs Automatisierte Fahrzeuge in der Ausbildung
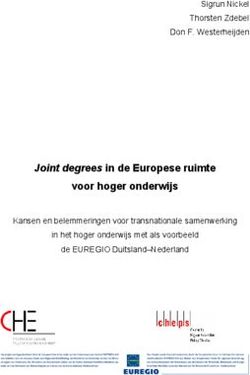
Tijdens het I-AT Project heeft HAN Automotive Research Während des I-AT-Projekts hat die HAN Automotive Research
verschillende aspecten van autonoom rijden onderzocht. verschiedene Aspekte des autonomen Fahrens untersucht.
Een belangrijk element was de operationele inzet van een Ein wichtiges Element war der operative Einsatz eines
geautomatiseerde shuttle op Airport Weeze. De inzet van automatisierten Shuttles am Flughafen Weeze. Dieser Shuttle
zo’n shuttle biedt een interessante leeromgeving. beförderte Passagiere zwischen dem Terminal und dem
Parkplatz. Der Einsatz eines solchen Shuttles bietet auch eine
Bij het testen van de veiligheid in de automobielindustrie interessante Lernumgebung.
ligt de focus vanouds op de bescherming van inzittenden
tegen letsel bij een aanrijding. Er is echter een Sicherheitstests in der Automobilindustrie haben sich
verschuiving gaande naar systemen die aanrijdingen traditionell darauf konzentriert, Insassen im Falle einer
moeten voorkomen. Om dergelijke systemen in Kollision vor Verletzungen zu schützen. Es gibt nun eine
verschillende omstandigheden te kunnen testen, heeft Entwicklung hin zu Systemen, die Kollisionen vermeiden
HAN Automotive Research een mobiel testplatform sollen. Um solche Systeme bei unterschiedlichen Bedingungen
ontworpen. Deze test ‘rig’ kan gebruikt worden om testen zu können, hat HAN Automotive Research eine mobile
voertuigfuncties voor de preventie van aanrijdingen te Testplattform entwickelt und die zugehörigen Testverfahren
testen of de impact van een botsing te beperken. definiert. Dieses ‘Test-rig‘ kann eingesetzt werden, um
Fahrzeugfunktionen zur Vermeidung von Kollisionen zu testen
Nieuwe technologie betekent ook een verschuiving in oder die Auswirkungen einer Kollision zu mildern.
de materialen waarmee studenten werken. Behalve
met traditionele componenten werken zij nu ook met Neue Technologie bedeutet auch einen Wandel der
sensoren, computers en functies voor autonoom rijden. Materialien, mit denen die Studenten arbeiten. Neben
HAN Automotive en Technova College richten zich op de herkömmlichen Komponenten arbeiten sie jetzt auch mit
toepassing van deze technologie voor zowel engineering Sensoren, Computern und Funktionen für autonomes Fahren.
als onderhoud. Technova College gebruikt een I-AT Shuttle Der HAN Automotive Campus und das Technova College
als studie-object; studenten van HAN Automotive kunnen konzentrieren sich auf die Anwendung dieses Wissens sowohl
met de Mission-bus experimenteren. Inmiddels is er ook für das Engineering als auch für die Wartung. Das Technova
contact gelegd met hogescholen en ROC’s in Nordrhein- College verwendet einen der I-AT-Shuttles als Studienobjekt.
Westfalen die belangstelling hebben voor de andere I-AT HAN Automotive nutzt den Mission-Bus, mit dem die
Shuttle voor onderwijsdoeleinden. Studenten experimentieren können. Mittlerweile wurde auch
Kontakt zu Hochschulen und Berufskollegs in Nordrhein-
Automonteurs moeten ook met sensoren De inzet van de voertuigen garandeert dat de kennis die in Westfalen aufgenommen, die an der Nutzung des zweiten
en computertechnologie werken het I-AT Project is opgedaan, doorgegeven wordt aan de I-AT-Shuttles zu Ausbildungszwecken interessiert sind.
toekomstige generatie, die met autonome voertuigen zal
Automechaniker müssen auch mit Sensoren werken. Der Einsatz der Fahrzeuge garantiert, dass das im I-AT-Projekt
und Computertechnologie arbeiten gewonnene Wissen weitergegeben wird an die zukünftige
Generation, die mit autonomen Fahrzeugen arbeiten wird.
22 23Technova College neemt Das
TitelTechnova
Duits Technova
CollegeCollege
erhält
I-AT Shuttle over I-AT
neemt
Shuttle
I-AT Shuttle over
Op 1 juli 2019 vond de feestelijke overhandiging plaats AmOp1.1 Juli
juli 2019 vond
fand die
de feestelijke
feierliche Übergabe
overhandigingeines der
van één van de zelfrijdende I-AT shuttles aan Technova I-AT-Shuttles
plaats van éénan das
van Technova
de zelfrijdende
CollegeI-AT
in shuttles
Ede statt.aan
Das
College in Ede. De technische MBO-school ontwikkelt technische
Technova College
Berufskolleg
in Ede.
entwickelt
De technische
in Zusammenarbeit
mbo-school
in samenwerking met de Hogeschool van Arnhem en mit
ontwikkelt
der Hochschule
in samenwerking
HAN neuemet Curricula,
de Hogeschool
um van
Nijmegen (HAN) nieuwe leerlijnen om autonoom rijden automatisiertes
Arnhem en Nijmegenbzw. autonomes
(HAN) nieuwe
Fahrenleerlijnen
in den om
in het onderwijs te integreren. Lehrplan
autonoom zu integrieren.
rijden in het onderwijs te integreren.
Dankzij de I-AT Shuttle krijgt het onderwijs toegang tot Dank
Dankzij
desdeI-ATWEpod
Shuttles
krijgt
erhält
het die
onderwijs
Bildungseinrichtung
toegang tot
technische systemen, sensoren en software die voor Zugang
technische
zu technischen
systemen, sensoren
Systemen,en Sensoren
softwareunddie voor
autonoom rijden gebruikt worden. Deze technologie Software,
autonoom dierijden
für autonomes
gebruikt worden.
Fahren Deze
verwendet
technologie
ontwikkelt zich in hoog tempo. Voor de opleiding werden.
ontwikkelt
DiesezichTechnologie
in hoog tempo.
entwickelt
Voor de
sich
opleiding
rasant. Der
motorvoertuigentechniek van Technova College is de Shuttle
motorvoertuigentechniek
ist ein interessantesvan Werkzeug
Technovazum College
Lernenisund
shuttle een interessante tool om mee te leren en te Experimentieren
de shuttle een interessante
für die Mechatronikerausbildung
tool om mee te leren am en
experimenteren. Technova
experimenteren.
College.
De shuttle - toen nog WEpod genoemd - fungeerde Der
De Shuttle
shuttle - damals
toen nog WEpod
WEpod genannt
genoemd - diente
- fungeerde
mehrere
enkele jaren als testvoertuig van de provincie Jahre
enkelealsjaren
Testfahrzeug
als testvoertuig
für die Provinz
van de provincie
Gelderland, um
Gelderland om de ontwikkeling van zelfrijdend die
Gelderland
Entwicklungom des
de ontwikkeling
automatisiertenvan öffentlichen
zelfrijdend
openbaar vervoer en transport te stimuleren. Het Verkehrs
openbaar zuvervoer
fördern.en Während
transporteines
te stimuleren.
Pilotprojekts Hetwurde
voertuig reed tijdens een pilotproject al eerder in Ede/ das
voertuig
Fahrzeug
reedbereits
tijdensineenEde/Wageningen
pilotproject al zwischen
eerder dem
Wageningen tussen het NS-station en de campus van Bahnhof
in Ede/Wageningen
und dem WUR-Campus
tussen het NS-station
eingesetzt.en Danach
de
de WUR. Daarna reed de shuttle als onderdeel van het fuhr
campus
der Shuttle
van de als
WUR.TeilDaarna
des I-AT-Projekts
reed de shuttle
am Flughafen
I-AT Project op Weeze Airport tussen de terminal en de Weeze
onderdeel
zwischen
van hetdem I-AT
Terminal
Projectund
op Weeze
dem Parkplatz.
Airport
parkeerplaats. tussen de terminal en de parkeerplaats.
Ad van Dijk, Direktor des Technova College, freute sich
Ad van Dijk, directeur Technova College, is verheugd auf
Adden
van Einsatz
Dijk, directeur
des Shuttles
Technova
im Lehrplan:
College, „Wir
verheugt
werden
over de inzet van de shuttle in het onderwijs. “We den
zichKraftfahrzeugtechnikkurs
op de inzet van de shuttle mit
inneuen
het onderwijs.
Komponenten
gaan de opleiding motorvoertuigentechniek verrijken bereichern,
“We gaan de unter
opleiding
anderem motorvoertuigentechniek
mit ‘alternativen‘
Overhandiging
De overhandiging
zelfrijdende
van een I-AT
I-ATShuttle
shuttleaan Technova College met nieuwe onderdelen waaronder ‘alternatieve’ Antriebsformen
verrijken met nieuwe
und Technologien
onderdelenfür waaronder
autonomes
aandrijvingen en technologie voor autonoom rijden. De Fahren.
‘alternatieve’
Der I-ATaandrijvingen
Shuttle ist einenexperimentelles
technologie Beispiel
DE Overhandiging
Űbergabe eines I-AT
zelfrijdende
Shuttles anI-AT
dasshuttle
Technova College I-AT Shuttle is een experimenteel voorbeeld van deze für
voor
diese
autonoom
Entwicklung
rijden.undDewir
I-AT
können
Shuttlevielis een
davon
ontwikkeling en daar kunnen we veel van leren.” lernen.“
experimenteel voorbeeld van deze ontwikkeling en
daar kunnen we veel van leren.”
24 25Living Lab Aachen-Vaals met OV-shuttle Living Lab Aachen-Vaals mit ÖV-Shuttle
Het Living Lab Aachen-Vaals, dat door Werkpakket 4 Das vom Arbeitspaket 4 eingerichtete Living Lab
opgezet zou worden, had ten doel de in Werkpakket Aachen-Vaals zielte darauf ab, den in Arbeitspaket
1 ontwikkelde, geautomatiseerde Mission-bus 1 entwickelten automatisierten Mission-Bus als
als een grensoverschrijdende OV-shuttle tussen grenzüberschreitenden ÖV-Shuttle zwischen der
de universiteitskliniek in Aken en de Nederlandse Universitätsklinik in Aachen und der niederländischen
gemeente Vaals te laten rijden. Gemeinde Vaals zu betreiben.
Daarvoor werd een route tussen de beide gemeenten Zu diesem Zweck wurde eine Strecke zwischen
uitgekozen en voor het gebruik door een autonome den beiden Gemeinden ausgewählt und für den
shuttle geanalyseerd. Royal HaskoningDHV heeft het Einsatz eines automatiserten Shuttles analysiert.
7,5 km lange traject in wegvakken onderverdeeld en Royal HaskoningDHV hat die 7,5 km lange Strecke in
gedetailleerd in kaart gebracht. De routebeoordeling Abschnitte unterteilt und diese detailliert kartiert.
was de basis voor de toelatingsprocedure van het Die Streckenbewertung war die Grundlage für das
autonome voertuig. Genehmigungsverfahren des automatisierten Fahrzeugs.
Helaas heeft de Mission-bus in de loop van het project Leider konnte der Mission-Bus im Verlauf des Projekts
niet alle noodzakelijke hordes voor de toelating kunnen nicht alle notwendigen Hürden für die Zulassung
nemen. De route liep bovendien helemaal over de überwinden. Die Strecke verlief auch ausschließlich
openbare weg, hetgeen door de verkeersdynamiek auf öffentlichen Straßen, was aufgrund der
een bijzondere uitdaging voor een autonoom rijdend Verkehrsdynamik eine besondere Herausforderung
voertuig is. Het toelatingsproces werd begeleid door für ein automatisiertes Fahrzeug darstellt. Das
BBH, dat de juridische randvoorwaarden voor de Zulassungsverfahren wurde seitens BBH begleitet, die
inzet van een autonome shuttle onderzocht heeft. De die rechtlichen Voraussetzungen für die Nutzung eines
geplande enquête om de acceptatie door gebruikers autonomen Shuttles untersuchte. Die geplante Umfrage
van het voertuig te onderzoeken werd in een andere zur Untersuchung der Benutzerakzeptanz des Fahrzeugs
vorm uitgevoerd. Het bleek dat de inwoners van Aken wurde in einem anderen Format durchgeführt.
veel vertrouwen in de nieuwe technologie hebben. Es stellte sich heraus, dass die Aachener sehr viel
Vertrauen in die neue Technologie haben.
De geplande integratie van de shuttle in de movA
MaaS-app van OV-bedrijf ASEAG werd ook gerealiseerd. Die geplante Integration des Shuttles in die MaaS-App
De shuttle kan als lijndienstshuttle of on-demand movA des öffentlichen Verkehrsunternehmens ASEAG
Shuttle in de App aangeboden worden. Tijdens de wurde ebenfalls realisiert. Der Shuttle kann als Linien-
Demo Dagen in Aldenhoven werden de Mission-bus en Shuttle oder On-Demand-Shuttle in der App angeboten
de movA-app gepresenteerd en live gedemonstreerd. werden. Während der Demo-Tage in Aldenhoven
wurden der Mission-Bus und die movA-App live
präsentiert und demonstriert.
26 27Routebeoordeling voor de Streckenbewertung für den
Mission-bus Mission-Bus
Ter voorbereiding op de geplande pilot met de Mission- In Vorbereitung auf das geplante Pilotprojekt
bus in Aken - Vaals heeft Royal HaskoningDHV een mit dem Mission-Bus in Aachen - Vaals führte
routebeoordeling uitgevoerd. Om aanbevelingen Royal HaskoningDHV eine Streckenbewertung
te kunnen doen voor het rijgedrag van autonome durch. Um Empfehlungen für das Fahrverhalten
voertuigen werd ook gekeken naar de veiligheid van autonomer Fahrzeuge geben zu können, wurde die
andere voertuigen en fietsers op de route. De risico’s Sicherheit anderer Fahrzeuge oder Radfahrer auf
werden beoordeeld met behulp van het Probabilistic der Strecke untersucht. Die Risiken wurden anhand
Driving Risk Field (PDRF) en het subjectieve risico des Probabilistic Driving Risk Field (PDRF) und des
op basis van gerapporteerde risicowaardes over het subjektiven Risikos anhand der gemeldeten Risikowerte
fietsgedrag en het vertrouwen in autonome voertuigen für das Fahrverhalten und das Vertrauen in die
van fietsers. Zo konden aanbevelingen worden gedaan autonomen Fahrzeuge der Radfahrer bewertet. So
voor de rijmodus (autonoom, semi-autonoom of konnten Empfehlungen für den Fahrmodus (automated,
handmatig) en voor de manoeuvres (inhalen of volgen) semi-automated oder manuell) und für die Manöver
van het autonome voertuig. (Überholen oder Folgen) des autonomen Fahrzeugs
gegeben werden.
De beoordeling van de fysieke infrastructuur is
eveneens bepalend voor de rijmodus op de route. Er Die Beurteilung der physischen Infrastruktur bestimmt
werd een checklist opgesteld met alle noodzakelijke auch den Fahrmodus auf der Strecke. Es wurde eine
en nuttige aspecten waar een weg aan moet voldoen. Checkliste mit allen notwendigen und nützlichen
Daarnaast werd een uitgebreide routebeoordeling Aspekten erstellt, die eine Straße erfüllen muss.
uitgevoerd om de geschiktheid van de infrastructuur Zusätzlich wurde eine umfassende Streckenbewertung
te bepalen. Er werd onder meer gekeken naar de durchgeführt, um die Eignung der Infrastruktur zu
voertuigspecificaties en de richtlijnen van de fabrikant bestimmen. Berücksichtigt wurden unter anderem die
voor het instellen van de rijmodus. De route werd Fahrzeugspezifikationen und die Herstellerrichtlinien
opgedeeld in wegvakken, waarvan 23 kenmerken zur Einstellung des Fahrmodus. Die Strecke wurde in
werden geanalyseerd. Het resultaat was een Straßenabschnitte unterteilt, bei denen 23 Merkmale
digitale kaart met kleurcodering, een gedetailleerde analysiert wurden. Das Ergebnis war eine digitale Karte
beschrijving van de wegvakken en een gedetailleerde mit Farbcodierung, eine detaillierte Beschreibung der
Overhandiging
De route tussenzelfrijdende
Aken en Vaals
I-ATisshuttle
nauwkeurig beoordeeld tekening van het wegvak. Op basis van die informatie Straßenoberflächen und eine detaillierte Zeichnung der
kan bepaald worden hoe een autonoom voertuig moet Straßenabschnitte. Anhand dieser Informationen kann
DieOverhandiging
DE Strecke zwischen zelfrijdende
Aachen undI-ATVaals
shuttle
wurde rijden en reageren. definiert werden, wie ein autonomes Fahrzeug fahren
detailliert evaluiert und reagieren sollte.
28 29Integratie van de movA-app Integration der movA App
in MaaS in MaaS
movA is de naam voor de Mobility as a Service (MaaS) movA ist der Name für die Mobility as a Service
app van ASEAG, het openbaar vervoer bedrijf voor (MaaS) App von ASEAG, dem öffentlichen
de regio Aken. De app bundelt en maakt het totale Verkehrsunternehmen der Region Aachen. Die App
mobiliteitsaanbod in Aken en de regio toegankelijk via bündelt und macht das gesamte Mobilitätsangebot in
een digitaal platform. Behalve een puur informatieve Aachen und der Region über eine digitale Plattform
zoekfunctie voor de verschillende reisalternatieven zugänglich. Neben einer rein informativen Suchfunktion
p5 powerpoint biedt de movA-app een geïntegreerde functie voor het
boeken en betalen van het complete mobiliteitsaanbod.
für die verschiedenen Reisealternativen bietet die
movA-App eine integrierte Funktion zum Buchen und
Abrechnen des gesamten Mobilitätsangebots.
Het doel van het Living Lab Aken - Vaals was de in het
I-AT Project ontwikkelde, geautomatiseerde shuttle als Ziel des Living Lab Aachen – Vaals war es, das im
onderdeel van een lijndienst of als on-demand dienst I-AT-Projekt entwickelte automatisierte Shuttle als Teil
in de movA-app te integreren. In het kader van het eines Linienverkehrs oder als On-Demand-Dienst in die
project is het gelukt om de on-demand diensten via movA-App zu integrieren. Im Rahmen des Projekts ist
movA beschikbaar te maken en te boeken. Daardoor es uns gelungen, die On-Demand-Dienste verfügbar
kan ook een shuttle tussen Aken en Vaals in de app zu stellen, die über movA buchbar sind. Dadurch kann
geïntegreerd worden. Dankzij de integratie in de auch ein Shuttle zwischen Aachen und Vaals in die
movA MaaS-app kan het on-demand aanbod ook met App integriert werden. Dank der Integration in der
andere mobiliteitsvoorzieningen zoals traditionele MaaS-App movA kann das On-Demand-Angebot auch
openbaar vervoerlijnen, eBikeSharing, CarSharing, mit anderen Mobilitätsangeboten wie klassischen
eScooterSharing en binnenkort ook met taxibedrijven öffentlichen Verkehrsmitteln, eBikeSharing, CarSharing,
verbonden worden. Bij gecombineerde verbindingen eScooterSharing und bald auch mit Taxiunternehmen
bestaande uit bijvoorbeeld openbaar vervoer en verbunden werden. Bei kombinierten Verbindungen,
on-demand diensten is de aansluiting op de reguliere die beispielsweise aus öffentlichen Verkehrsmitteln und
dienstregeling gegarandeerd. On-Demand-Diensten bestehen, ist der Anschluss an
den jeweiligen LinienVerkehr sichergestellt.
30 31Acceptatie en comfort van Akzeptanz und Komfort von
zelfrijdend vervoer autonomen Verkehr
Tijdens het I-AT Project is er door de TU Delft onderzoek Während des I-AT-Projekts untersuchte die TU-Delft die
gedaan naar de acceptatie van autonome voertuigen Akzeptanz automatisierter Fahrzeuge durch Fahrgäste
door passagiers en mede-weggebruikers. Surveys und andere Verkehrsteilnehmer. Umfragen und
en interviews geven over het algemeen een positief Interviews zeigen im Allgemeinen ein positives Bild der
beeld van de acceptatie van zelfrijdend vervoer, zoals Akzeptanz des automatisierten Transports, wie mit dem
gedemonstreerd met de I-AT Shuttle en de Mission-bus. I-AT-Shuttle und dem Mission-Bus demonstriert wurde.
De integratie in het transportsysteem en de reistijd Die Integration in das Verkehrswesen und die Reisezeit
blijken belangrijke factoren in de acceptatie. De hogere scheinen wichtige Faktoren für die Akzeptanz zu sein.
snelheid van de Mission-bus - rond 30 km/h - bleek een Die höhere Geschwindigkeit des Mission-Busses - rund
belangrijke stap in vergelijking met de I-AT Shuttle en 30 km / h - erwies sich im Vergleich zu den I-AT Shuttles
andere zelfrijdende shuttles. und anderen selbstfahrenden Shuttles als wichtiger
Schritt.
Het rijcomfort is voor passagiers eveneens van
belang. Dat werd in het WEpod-project al aanzienlijk Auch der Fahrkomfort ist für die Fahrgäste wichtig. Dies
verbeterd door minder abrupt te reageren op andere wurde im WEpod-Projekt bereits erheblich verbessert,
weggebruikers. In het I-AT Project is gewerkt aan een indem weniger abrupt auf andere Verkehrsteilnehmer
verdere verbetering van het comfort. Zoals verwacht reagiert wurde. Im I-AT-Projekt wurde daran gearbeitet,
Met een polsband werden emoties van passagiers gemeten wordt comfort vooral kritisch bij langere reistijden en den Komfort weiter zu verbessern. Wie erwartet ist der
er kan wagenziekte optreden als passagiers tijdens Komfort bei längeren Fahrzeiten besonders kritisch und
Mit einem Pulsband wurden Emotionen der Passagiere gemessen dynamische rijcondities niet naar buiten kunnen es kann zu Reisekrankheit kommen, wenn die Fahrgäste
kijken. De door TU Delft ontwikkelde modellen van unter dynamischen Fahrbedingungen nicht aus dem
bewegingscomfort kunnen gebruikt worden voor Fahrzeug schauen können. Mit den von der TU Delft
een nog comfortabelere aansturing van zelfrijdende entwickelten Modellen für Bewegungskomfort können
voertuigen. Ook de ervaring van veiligheid is essentieel selbstfahrende Fahrzeuge noch komfortabler gesteuert
voor de acceptatie. Passagiers stellen menselijke werden. Das Sicherheitsgefühl ist ebenfalls wesentlich
supervisie vanuit een controlroom zeer op prijs als er für die Akzeptanz. Passagiere schätzen die menschliche
geen ‘safety steward’ in het voertuig zelf aanwezig is. Überwachung aus einem Kontrollraum sehr, vor allem
wenn sich im Fahrzeug selbst kein Steward befindet.
De acceptatie van zelfrijdende voertuigen door
voetgangers en fietsers laat geen grote verschillen ten Die Akzeptanz von selbstfahrenden Fahrzeugen durch
opzicht van de acceptatie van door mensen bestuurde Fußgänger und Radfahrer unterscheidet sich nicht
voertuigen. wesentlich von der Akzeptanz von Fahrzeugen, die von
Menschen gesteuert werden.
32 33Mission-bus presteert prima Erfolgreicher Einsatz Mission-Bus
op Aldenhoven in Aldenhoven
De testritten met de nieuwe autonoom rijdende Die Testfahrten mit dem neuen automatisierten
Mission-bus van het I-AT Project op 10, 11 en 12 Mission-Bus des I-AT-Projekts am 10., 11. und 12. März
maart op het testcircuit in het Duitse Aldenhoven auf der Teststrecke in Aldenhoven waren ein Erfolg. An
waren een succes. Voor de test- en demonstratieritten den drei Tagen waren verschiedene Gruppen zu den
waren gedurende de drie dagen diverse groepen Test- und Demonstrationsfahrten eingeladen. Am 10.
gasten uitgenodigd. Op 10 maart waren R&D- März waren Mitglieder von Entwicklungsabteilungen,
afdelingen, engineers en onderzoeksinstellingen te Ingenieure und Forschungseinrichtungen zu Gast,
gast; op 11 maart OV-bedrijven, andere aanbieders van am 11. März öffentliche Verkehrsunternehmen,
personenvervoer, beleidsmakers en overheden, terwijl weitere Anbieter von Personenverkehr, politische
op donderdag 12 maart de partners van het I-AT project Entscheidungsträger und öffentliche Verwaltungen,
naar het testcircuit kwamen. während am Donnerstag, dem 12. März die Partner des
I-AT-Projekts anwesend waren.
De bus reed de geprogrammeerde route op het circuit
vele keren zonder problemen. Tijdens de ritten kregen Der Bus fuhr die programmierte Route auf der Strecke
de passagiers uitleg over de bus en de sensoren. Op viele Male ohne Probleme. Während der Fahrten
een scherm voor in de bus was te zien hoe de sensoren erhielten die Fahrgäste Informationen zu dem Bus
functioneren. Bovendien werden onderweg enkele und den Sensoren. Auf einem Bildschirm vorne im
Testrit met de Mission-bus in Aldenhoven
incidenten en noodstops gesimuleerd. Bus wurde gezeigt, wie diese Sensoren funktionieren.
Darüber hinaus wurden auf dem Weg einige
Testfahrt mit dem Mission-Bus in Aldenhoven Naast de testritten werden er voor de gasten korte Zwischenfälle und Notstopps simuliert.
presentaties gegeven over de andere onderdelen van
het I-AT Project. De TU Delft presenteerde bijvoorbeeld Zusätzlich zu den Testfahrten wurden den Gästen
de uitkomsten van een onderzoek naar de acceptatie kurze Präsentationen über die anderen Aktivitäten
van autonome voertuigen door passagiers; het Duitse des I-AT-Projekts gegeben. So präsentierte die TU
OV-bedrijf ASEAG presenteerde de ‘movA-app’ en Royal Delft die Ergebnisse einer Studie zur Akzeptanz
HaskoningDHV gaf een presentatie over de invloed van autonomer Fahrzeuge durch Fahrgäste. Das Aachener
de fysieke infrastructuur op het programmeren van Verkehrsunternehmen ASEAG präsentierte die ‘movA-
routes voor autonome voertuigen. App’ und Royal HaskoningDHV hielt einen Vortrag
Overhandiging zelfrijdende I-AT shuttle über den Einfluss der physischen Infrastruktur auf die
In het totaal bezochten gedurende de drie dagen zo’n Programmierung von Routen für autonome Fahrzeuge.
DE Overhandiging zelfrijdende I-AT shuttle 150 personen de Automated Driving Experience van het
I-AT Project. Insgesamt nahmen an den drei Tagen rund 150 Personen
an der ‘Automated Driving Experience‘ von I-AT teil.
34 35Kennis opdoen, verzamelen en delen Wissen aufbauen, sammeln und teilen
Werkpakket 5 hield zich in het I-AT Project bezig met Das Arbeitspaket 5 des I-AT-Projekts befasste sich mit der
kennisontwikkeling en -overdracht. Dat sloot goed aan Entwicklung und dem Transfer von Wissen. Dies liegt auf
bij de grote belangstelling voor autonoom rijden in de einer Linie mit dem großen Interesse an automatisiertem
periode 2017-2020. De I-AT partners verzamelden via Fahren im Zeitraum 2017-2020. Die I-AT-Partner
conferenties en onderzoek kennis over automatische sammelten durch Konferenzen und Forschungsarbeiten
voertuigen uit de hele wereld en deelden die met Erkenntnisse zu automatisierten Fahrzeugen aus aller
landelijke netwerken, communities en werkgroepen. Welt und teilten es mit nationalen Netzwerken und
I-AT verzorgde tientallen demonstraties, proefritten en Arbeitsgruppen. I-AT organisierte eine große Anzahl
was aanwezig op tal van events om uitleg te geven over Demonstrationen und Testfahrten und nahm an
automatisch rijden. zahlreichen Veranstaltungen teil, um Informationen zum
automatisierten Fahren bereitzustellen.
De partners van het I-AT Project hebben waardevolle Die Partner des I-AT-Projekts haben wertvolle
lessen geleerd, leergeld betaald bij tegenvallers Erfahrungen gemacht, Erkenntnisse gewonnen aus
en best practices verzameld en gedeeld. Er werd Rückschlägen und Best Practices gesammelt und
bijvoorbeeld een online bibliotheek ingericht waarin ausgetauscht. Es wurde eine Online-Bibliothek
onderzoeksdocumenten worden gedeeld. Ook op de I-AT aufgebaut, in der die Forschungsdokumente geteilt
website zijn rapporten te vinden. wurden. Diese Dokumente finden Sie zum Teil auch auf
der I-AT Webseite.
In Weeze en Aldenhoven werden de
onderzoeksresultaten en ervaringen gepresenteerd In Weeze und Aldenhoven wurden die
en testritten uitgevoerd. Onderzoek en kennis over Forschungsergebnisse und Erfahrungen vorgestellt
truckplatooning werden breed gedeeld en het und Probefahrten durchgeführt. Studien und
afsluitende seminar in Kleef werd goed bezocht. Aan Erkenntnisse über Truck Platooning wurden mit einem
het einde van het I-AT project werd een masterclass breiten Publikum geteilt und das Abschlussseminar
georganiseerd waarin kennis en ervaringen over in Kleve war gut besucht. Am Ende des I-AT-
autonoom rijdende shuttle-bussen werden gedeeld Projekts wurde eine Masterclass organisiert, in der
en bediscussieerd. Ook heeft kennisuitwisseling Erkenntnisse und Erfahrungen über automatisierte
plaatsgevonden met de ‘Krachtenbundeling’ in Shuttlebusse ausgetauscht und diskutiert wurden.
Nederland, het netwerk innocam.nrw en het Interreg- Der Wissensaustausch fand auch mit dem Netzwerk
project Terminal. ‘Krachtenbundeling‘ aus den Niederlanden, dem
Overhandiging zelfrijdende I-AT shuttle Netzwerk innocam.nrw und dem Interreg-Projekt
Met al deze kennis worden soortgelijke projecten in staat Terminal statt.
DE Overhandiging zelfrijdende I-AT shuttle gesteld om een vliegende start maken en te voorkomen
dat ze het automatische wiel zelf nog een keer moeten Mit all diesem Wissen haben vergleichbare Projekte
uitvinden. die Basis für einen fliegenden Start und müssen das
‘automatische Rad‘ nicht selber noch einmal neu
36 erfinden. 37Masterclass over Masterclass automatisierte
automatische shuttles Shuttles
Masterclass
nu online en Een van de meest aansprekende voorbeelden van Eines der bemerkenswertesten Beispiele für den
ar
verplaatst na
5 november
2020 de kennisoverdracht door het I-AT Project was de Wissenstransfer durch das I-AT-Projekt war die
Masterclass
verschoben und
masterclass ‘Het gebruik van automatische shuttles Masterclass ‘Einsatz automatisierter Shuttles im
in het openbaar vervoer’. De masterclass gaf een Öffentlichen Verkehr’. Die Masterclass wurde vom
Union
Europäische Unie
Europese
Europäische Union
Europese Unie
jetzt online am
05. November 2020!
baar vervoe
r’ uitgebreid overzicht van de kennis en ervaring, die Arbeitspaket 5 organisiert und bot einen umfassenden
s in het open
n au to m a� sche shu�le �e in het I-AT Project met betrekking tot autonoom Überblick über die im I-AT-Projekt gesammelten
bruik va implementa
rclass: ‘Het ge
Masterclass: „Einsatz automa�sierter Shu�les bietet Chancen für den Öffentlichen Verkehr“
Maste chnologie en lke
en, ra ndvoorwaar
den, te biliteit en we
�seerde mo
nt geautoma Technik, Rahmenbedingungen,
ruik van Konzepte, Chancen und Umsetzung rijdende shuttles is opgedaan. Van deze kennis kunnen Erkenntnisse und Erfahrungen in Bezug auf automatisierte
Mogelijkhed
• Wat beteke er voor het geb
Masterclass dagingen zijn vervoer?
kansen en uit het openbaar
Namens het
I-AT Project
nodigen wij
u uit voor een
erde shu�le
s in het openba
ar
autonoom rijdend e s inNamen
shu�leIm des
d zijn
s learnezur
er in pro jec ten in I-AT (www.i-at.eu) laden wir Sie
Interreg-Projektes
t u automa�sierter Shu�les im
• Was bedeutet automa�sierte Mobilität und welche organisaties en bedrijven profiteren, die zelf plannen Shuttles. Organisationen und Unternehmen, die ihre
geautoma�se eel zijn van gen en lessonherzlich en hoe kun
Masterclass ‘Einsatz Chancen und Herausforderungen gibt es für den Einsatz im
k van erd • Welke ervarin opa opgedaan
hebben voor de inzet van dergelijke shuttles. eigenen Pläne für den Einsatz solcher Shuttles haben,
rui ond
over het geb gel ijke shu�les kan ss bre ngen itsland en Eur
Öffentlichen Verkehr‘ ein. Der Einsatz solcher Shu�les und öffentlichen Personentransport?
vervoer. De
inzet van der de Maste rcla Nederland, Du t?
ervoer. Tijdens n samen voor uw pro jec
Peoplemover kann che, zukün�ig ein wich�ger Bestandteil eines • Welches Know-how und welche Erfahrungen aus
het personenv aar. We werke die gebruiken hnische, juridis
maatwerk in er�se bij elk
we recente erv
aringen en exp
n van de uitdagingen
en de • Met welke
relevante tec maßgeschneiderten,
moet u rekeni
den?
ng houöffentlichen Personenverkehrs sein. Im
ige aspectenRahmen der Masterclass werden dazu Praxiserfahrungen und
Ak�vitäten in den Niederlanden, Deutschland und Europa
können Sie für Ihr Vorhaben nutzen?
können von diesem Wissen profitieren.
in kaart brenge t op te ze�en. verkeerskund
met u aan het laagd projec
succesfactor
en om een ges
Fachkenntnisse zusammengeführt. Gemeinsam mit Ihnen werden
die Herausforderungen und Erfolgsfaktoren für eine erfolgreiche
• Welche relevanten technischen, juris�schen und
Verkehrsaspekte müssen dabei berücksich�gt werden? De masterclass wilde antwoord geven op vragen als:
opze�en
heterarbeitet.
elingen voor
wat betekent geautomatiseerde mobiliteit en welke
Projektkonzep�on
hee� de
• lessons lea
rned en aan
bev
Die Masterclass zielte darauf ab, Fragen zu beantworten
Programma nsport (I-AT) van projecten
tomated Tra
Het Project Int
erregional Au
e jaar onderz
oek ged aan naar het geb
ruik van
labs Programm I-AT experts
een • Genehmigungsverfahren für die Nutzung auf öffentlichen Wegen
kansen en uitdagingen zijn er voor het gebruik van wie: Was bedeutet automatisierte Mobilität und welche
afgelopen dri illende living Experts senteren de voor de
en in versch t van sterclass pre van projecten
geautoma�se
ing en
erde mobiliteit
ontwikkeld en get est . Er liep onder
Air por t We
meer een pilo
eze. Daar is vee l Tijdens de Ma
zel fon twikkelde aan pak
Das Projekt
voo r het opze�en
vergangenen
e OV -sh u�
I-AT (Interregional
drei
les t �jd
kun intensiv
. UJahren
Automated Transport) hat in den
ens deden Einsatz automa�sierter
• Routenplanung
• Lessons Learned und Empfehlungen zur Projekteinrichtung autonoom rijdende shuttles in het openbaar vervoer? Chancen und Herausforderungen gibt es für den Einsatz
opl oss rein van utoma�seerd inren
undinb gen.Labs ak�v verschiedene Lösungen
en op het ter en de ject(idee)
Welke ervaringen en lessons learned zijn er in projecten autonomer Shuttles im öffentlichen Verkehr? Welche
inzet van gea Mobilität untersucht Living
enkele maand de bediening uw eigen pro over Experten
de techniek, �seerde shu
�les. �eve sessies
ookentwickelt
rekening me
t vragen
arin g opg edaan m.b.t. gea uto ma inte rac wa ar mo
und
gel ijk getestet. Es wurde unter anderem ein
Die I-AT Experten präsen�eren einen selbstentwickelten Lei�aden
erv inzet van den danmehrmona�ges
cepta�e bij de De experts hou Pilotprojekt auf dem Gelände des Airport Weeze
gebruikersac
en de ervarin
gen uit vergel
ijkb are
r deze projecten
. durchgeführt. Hierbei wurden Erfahrungswerte zur Technologie,
zum Einsatz automa�sierter ÖV-Shu�les. Dabei werden sowohl die
gesammelten Erfahrungen als auch die Fragestellungen Ihrer in Nederland, Duitsland en Europa opgedaan en hoe Erfahrungen und Erkenntnisse wurden in Projekten in den
de I-AT pilots ontwikkeld ove Bedienung und Nutzerakzeptanz beim Einsatz ject automa�sierter
Masterclass
Op basis van Interreg-proÖV gesammelt.
kunt u die gebruiken voor uw eigen project? Met welke Niederlanden, Deutschland und Europa gesammelt und
eigenen konkreten Vorhaben soweit wie möglich berücksich�gt.
partners een erde mobiliteit
in het zumhet
jec ten heb ben de I-AT uto ma �se Gra �s deelname Shu�les alsond
keld als
erdeel van
Ergänzung bestehenden
de
pro
en inte gra �e van gea rde n de vol gende ste rcla ss in ontwikDas umfassende Wissen
al. De eln amedie
und aan gemachten Erfahrungen aus
g ss wo Ma Wa
de toepassin de Mastercla
De Euregio Rijn icht op den I-AT Partnern als Kostenlose Teilnahme
openbaar ver
voer. Tijdens
beh and eld :
teit
I-AT met ste
ste rcla ss
un van dediesem
is De Mastercla
gra�s. Grundlage für die
rijv en en
name gerdienten
ss is metProjekten
und weiteren
and
Erarbeitung
sa�es die
organidetaillierten
ere eines
Die Masterclass wurde im Rahmen des Interreg-Projektes I-AT mit relevante technische, juridische, verkeerskundige wie können Sie diese für Ihr eigenes Projekt verwenden?
onderwerpen ma�seerde
mobili Ma vervoer bed
openbaarMasterclass-Curriculums
Unterstützung aus Fördermi�eln der Euregio Rhein Waal und des
aspecten moet u rekening houden? Welche relevanten technischen, rechtlichen und
te ze� en.Einsatz automa�sierter Mobilität.
s van geauto overheden, e shu�les in
zum
• basiskenni ebieden utoma�seerd els en Duits Förderprogramms Interreg V A Deutschland-Nederland
toepassingsg overwegen gea lijk in het Eng
• gebruik en es wo rde n voorname ar
ld of
nodig vertaa Aspekte behandelt: bereitgestellt. Das Event ist für Sie kostenlos. Die Masterclass richtet
Een groot aantal experts dat betrokken was bij het
presenta� Während der Masterclass
cussies - wa werden folgende
• tec hno
• opera�one
log ie
le inzet van
shu�les
sta dsp lanning
De
gehouden en
zullen•- net
n.
als de
Grundlegendes
He
dis
t documenta�e
Wissen l is deels in het Mobilität
iaaautoma�sierten
materzur
sich in erster Linie an Verwaltungen und Organisa�onen, die konkret
den Einsatz automa�sierter ÖV-Shu�les planen. Die Präsenta�onen
verkehrstechnischen Aspekte sollten Sie berücksichtigen?
r en wo rde
r verkee samengevat • Einsatz undchi Anwendungsgebiete
kbaar.
• gevolgen voo
• de business
case: kosten
en opbrengst
voor het rijden
en
op de openba
re weg
Duits, Neder
lands en Engels bes
• Technologie
werden vorwiegend in Englisch und Deutsch bereitgestellt und wo
nö�g - auch während der interak�ven Diskussion - zusätzlich project heeft modules ontwikkeld over bijvoorbeeld Eine große Anzahl Experten haben Module zu Bereichen
gsprocedures • Betrieb
• goedkeurin
toepassingsgebieden, technologie, de operationele wie Anwendungen, Technologie, betrieblicher Einsatz von
inhaltlich in Niederländisch oder Deutsch übersetzt bzw.
de route • Poten�elle Effekte
line sessie s: verkehrs- und städtebauliche Planungen
auf
• keuze van a voor de on het zusammengefasst. Das Dokumenta�onsmaterial wird größenteils
Het programm • Business Case:(ge Kosten und Erlöse d vervoer in
automa�seer auf Englisch bereitgestellt.
en op zet van de Maste
rcla ss zijn veranderd
ste rcla ss alleen 12.00 - 12 .45 uu r Mobiliteit
ope nba ar vervoer en
de impact op
r, regelgeving
en toe la� ng) inzet van shuttles, kosten en opbrengsten, Shuttles, Kosten und Nutzen, Genehmigungsverfahren
Let op! Datum ben we beslot
en de Ma
infrastructuu
sterclass
Als gevolg van
in online vor
Covid-19 heb
m te geven.
De presenta�
op 29
es van de Ma
oktober 202
0 voor de
13 .45
Achtung! Datumeri
uu r Automa�s
undngFormat
(techniek
en appwir
der, ass essment van
Masterclass
�es)
licabeschlossen,
haben sich geändert
Das Programm für die Online-Sessions: goedkeuringsprocedures en de keuze van de route. und Streckenauswahl entwickelt.
eo opgenome n en
voor u ges chi kt 13.00 - Aufgrund von
infr astructuurhaben
Covid-19 die Masterclass nur
n op vid e op een de iness 12.00 - 12.45 Uhr
worde gez et. U kunt dez wo rde n er online in Online-Form anzubieten. Die
(les lea rned, busder
Präsenta�onen
son s Masterclass Mobilität (automa�sierter Verkehr im
onl ine ber twikkeling
deelnemers nd erd ag 5 novem llen en met jec ton ent ) öffentlichen Verkehr und Auswirkungen auf
nt bek ijken. Op do
rs vra gen kunnen ste
14 .00 - 15 .00 uur
werden Pro
auf Video aufgezeichnet
wa ch� ngsmanag und emden Teilnehmern ab dem 29.
De Masterclass was oorspronkelijk opgezet als
me ver Infrastruktur, Vorschri�en und Zulassung)
Die Masterclass war ursprünglich als zweitägige
mo de deelne me Oktobercas e en zur Verfügung gestellt. Sie können sich die Videos
online
lan d wa ar
sessies gep kun nen gaa n. zu einem für Sie passenden Zeitpunkt ansehen. Am Donnerstag, 13.00 - 13.45 Uhr Automa�sierung (Technologie,
sie
elkaar in discus t
eld
tweedaags evenement, maar werd wegens corona Veranstaltung geplant, musste aber aufgrund der Corona-
Infrastrukturbewertung und Anwendungen)
u zich aanm
dem 5. November, finden die interak�ven Online-Sessions sta�,
in op
denen 5 no mber. AlsFragen
dieveTeilnehmer stellen
r. und Diskussionen führen 14.00 - 15.00 Uhr
c�eve sessieskönnen.rmijn sluit op 27 oktobe
Projektentwicklung (Lessons Learned, Business
en de intera
omen u graag
class
bij de Master ar de video’s. De aanmeld
ing ste Case und Erwartungsmanagement)
uiteindelijk volledig online verzorgd. Video’s van de Situation letztendlich vollständig online angeboten
We verwelk
voor de sessi
e, ontva ng t u �jd ig de link na
een email te
sturen naar
h.van .lo nd en @gelderland.nl
Overhandiging zelfrijdende I-AT shuttle presentaties werden online gezet op de website van het werden. Videos der Präsentationen wurden auf der
melden door Wir hoffen, Sie zur Masterclass und den interak�ven Sessions am 5. November begrüßen
U kunt zich aan zu dürfen und freuen uns auf Ihre Teilnahme.
nde lijke groeten, Sie können sich für diese Masterclass gerne weiterhin - falls nicht bereits erfolgt - anmelden via E-Mail an I-AT Project, waarna er op 5 november drie interactieve Website des I-AT-Projekts veröffentlicht, gefolgt von drei
DE Overhandiging zelfrijdende I-AT shuttle
Met vrie
elink,
Herma Harm Frau Rina van Londen h.van.londen@gelderland.nl. Anmeldeschluss ist der 27. Oktober 2020.
Project
online sessies georganiseerd werden waar de vijftig interaktiven Online-Sessions am 5. November 2020, in
Union
Europäische Unie
ger I-AT
Europese
Projectmana
Mit freundlichen Grüßen,
Herma Harmelink
Projektmanager I-AT
deelnemers met elkaar in discussie konden gaan. denen die 50 Teilnehmer Informationen und Erfahrungen
austauschen konnten.
Europäische Union
Europese Unie
38 39Sie können auch lesen