Erfahrungsbericht Semesterarbeit 2017 - Studiengang ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Autonomer
Rohrroboter
Erfahrungsbericht Semesterarbeit 2017
Konzeption und Entwicklung eines autonomen Rohrroboters zur
Inspektion und Kartierung eines Rohrsystems
Teilnehmer aus Promotion Voltaire:
§ Team Birnbach – Folivi – Nüscheler
Ø https://www.youtube.com/watch?v=bfDJk6SnNXc&t=20s
§ Team Stock – Stucki – Tran
Ø https://www.youtube.com/watch?v=3MYseOeJlTw
§ Team Manatschal
Ø https://www.youtube.com/watch?v=SnWBQ2uAv_o
Studiengang Mechatronik Trinational
http://www.trinat.net/
Astrid Stock | Sena Folivi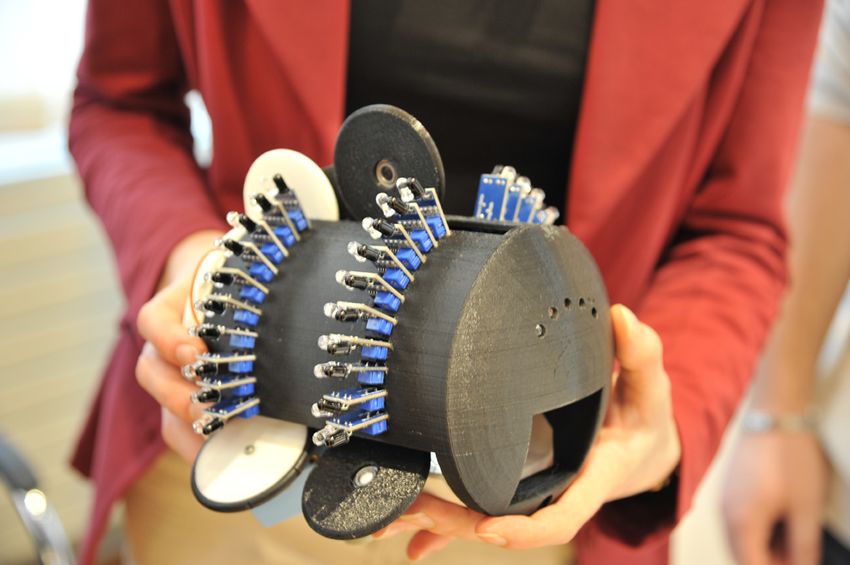
Anstoß
Der trinationale Robotik-Wettbewerb „Trinatronics“ ermöglicht es, in internationalen
Teams von Hochschulen aus der Region des Dreiländerecks in verschiedenen Disziplinen
mit selbstkonzipierten Robotern gegeneinander anzutreten. Da sowohl technische, als
auch sprachliche und interkulturelle Kompetenzen erfordert werden, ist der Wettbewerb
ideal für Mechatronik Trinational Studierende.
Mit dem Ziel, diesen Wettbewerb zu gewinnen, und das über das Studium erworbene
Knowhow anzuwenden, entschieden wir uns, diese Herausforderung anzunehmen. Die
Entwicklung des Roboters erfolgte im Rahmen der Semesterarbeit im sechsten Semester
des Studiengangs Mechatronik Trinational. Das Wettbewerbsteam bestand jeweils aus
mehreren Mechatronik Studierenden (aus der Schweiz und Deutschland), sowie
mehreren Studierenden (Frankreich) der ENSISA. Es ergaben sich insgesamt drei
teilnehmende Gruppen mit Beteiligung des mechatronischen Studiengangs in
unterschiedlichen Konstellationen. Folgender Link führt zur Webseite des Wettbewerbs:
https://trirhenatech.eu/ausbildung/trinatronics/gallery/Gallery/view/
Abbildung: Abschlussbild aller Teilnehmer des Wettbewerbs an der Universität des Oberelsass (Université Haute-Alsace)
Astrid Stock | Sena FoliviZiele
Was genau soll der Roboter können?
Die Hauptanforderung an den Roboter liegt im autonomen Durchfahren eines vorab
unbekannten Rohrsystems. Des Weiteren soll er folgende drei Disziplinen bewältigen, an
denen sich die Teilnehmer des Wettbewerbs letztlich messen:
1. Das Rohrsystem schnellstmöglich durchfahren
2. Das Rohrsystem in 3D kartieren
3. Löcher unterschiedlicher Größen im Rohrsystem erkennen, ausmessen und
aufzeichnen
Die Wahl für die Hard- und Software wurde den Teilnehmern freigestellt. Das verfügbare
Budget betrug 1200€. Eine Empfehlung für den Einsatz von Lego Mindstorms wurde zwar
von den betreuenden Dozenten des Wettbewerbs ausgesprochen, jedoch nach intensiver
Analyse aller möglichen Lösungsvarianten von den Gruppen mit Mechatronik
Trinational-Beteiligung nicht weiterverfolgt.
Abbildung: Roboter im Rohrsystem (Team Birnbach, Folivi, Nüscheler)
Entwicklung und Realisierung
Die Konzipierung folgte der Methodik des Systems Engineering der ETH Zürich. Dieser
zielorientierte Ansatz eignet sich sehr, um komplexe technische Systeme von Grund auf
zu entwickeln und zu realisieren, da der Blickwinkel im Analyseprozess auf alle
Lösungsvarianten erweitert wird und somit keine Möglichkeit unbeachtet bleibt.
Da das Projekt sehr komplex ist, wurde es in fünf Submodule unterteilt, welche soweit
möglichst eigenständig (als „Silos“) ausarbeitet wurden:
1. Sensorik zur Lochdetektion
2. Navigation (Antrieb, Regelung, Sensorik zur Navigation)
3. Steuerungseinheit
4. Mechanischer Aufbau und Energieversorgung
5. Visualisierung, Bedienschnittstelle und Kommunikation
Astrid Stock | Sena FoliviUm Ideen für das Lösungskonzept zu generieren, wurden bei allen Gruppen die aktuellen
Technologien sowie existierende Systeme analysiert. Als äußerst handlich in ihrer
Verwendung in diesem Projekt erwiesen sich Nutzwertanalysen und der morphologische
Kasten zur Ermittlung von unterschiedlichen, ganzheitlich realisierbaren
Lösungsvarianten. Das Grundkonzept der Realisierung lag bei beiden Teams (Birnbach –
Folivi – Nüscheler und Stock – Stucki – Tran) in einem 3D-gedruckten Chassis. Ein
modularer Aufbau war dabei essentiell, um schnelle Anpassungen vornehmen zu können.
Dieser Umstand wurde ebenfalls von beiden Teams erkannt. Unterschiede zwischen den
Konzepten ergaben sich ab diesem Punkt.
Team Stock – Stucki – Tran: Das Chassis hat einen Kranz, bei dem die Infrarotsensoren
eingesteckt werden. Diese sollen die Gradzahl der potentiellen Löcher abdecken. Anhand
der Intensität des reflektierten Lichts, geben die Sensoren ein digitales Signal zurück. Das
Herzstück des Roboters bildet ein Arduino, welcher über Bluetooth mit der visuellen
Bedienschnittstelle verbunden ist. Der MPU liefert dem Arduino ständig die absolute
Orientierung im System, die Encoder Motoren liefern die zurückgelegte Distanz. Diese
Daten sind notwendig für die Kartierung des Systems. Die Visualisierung der
Positionsdaten des Roboters, sowie die Lage der detektierten Löcher, wird in Processing
realisiert. Zudem übernimmt das Programm die Visualisierung der Bedienschnittstelle.
Die Grundidee ist dabei, dass es ein Hauptmenü gibt, aus dem man mit
Tastenkombinationen in die Kontrollfunktion, Kartierung und Lochdetektion wechseln
kann. Dafür wird das Prinzip einer Statemachine genutzt. Durch die kontinuierliche
Übertragung der Daten per Bluetooth, ist eine Kartierung in nahezu Echtzeit möglich.
Abbildung: 3D-Visualisierung der gefahrenen Strecke in Echtzeit (Team Stock – Stucki – Tran)
Astrid Stock | Sena FoliviTeam Birnbach – Folivi – Nüscheler: Ein wesentlicher Aspekt bei der Konzeption war
eine Beschränkung der Steuerungs- und Regelungseinheiten auf die unumgänglichen
Elemente, um die Anfälligkeit des Roboters zu minimieren. Dementsprechend wurde das
Chassis so konzipiert, dass es über eine mechanische Führung durch das gesamte
Rohrsystem geleitet wird. Die vorne am Roboter angebrachten „Fühler“ tangieren in
Kurven die Wand des Rohres, was zur Drehung des Roboters um den sich am Heck
befindlichen Drehpunkt führt. Der Einsatz von speziell gefertigten Omniwheels, die keine
Seitenkräfte übertragen, verhindert zuverlässig die Schräglage des Roboters – selbst bei
Höchstgeschwindigkeit kann ein Überschlag ausgeschlossen werden. Mit der
Verwendung von insgesamt 48 LDR-Sensoren (Light-Dependent-Resistor) kann jedes
Loch erkannt und anhand der Anzahl der Sensoren, deren Widerstandswert sich durch
das Eintreten von Licht verändert, auf die entsprechende Größe des Lochs
zurückgeschlossen werden.
Weiterhin fallen durch die 9-Achsen inertialen Messeinheit, die zusätzlich zu den
Encoder-Werten zur Ermittlung der zurückgelegten Strecke verwendet wird, eine
Vielzahl an Daten an, die in Matlab verarbeitet werden. Die Daten, die aus den Sensoren
über ein MuxShield (Kombination aus Multiplexer und Schieberegister) ausgelesen
werden, werden ebenfalls in Matlab interpretiert und visualisiert. Dies führt zu einer
Entlastung der zentralen Steuerungseinheit (Arduino) auf dem Roboter – und
dementsprechend ebenfalls zu einer höheren Zuverlässigkeit.
Abbildung: Morphologischer Kasten zur Lösungsfindung (Team Birnbach – Folivi – Nüscheler)
Astrid Stock | Sena FoliviErgebnis
Die von unserem Studiengang aus an den Start gegangen konnten mit überzeugenden
Leistungen die Podiumsplätze des Wettbewerbs vollständig belegen. Ein knapper
Punkteunterschied zwischen den beiden erst- und zweitplatzierten Teams entschied
letztendlich über die Vergabe der Preise. Das Team mit Herrn Maurus Manatschals
Beteiligung erreichte den dritten Platz, während das Team um Frau Astrid Stock und den
Herren Michael Stucki und Antonius Tran den zweiten Platz belegte.
Abbildung: Team um Frau Stock, Herrn Stucki und Herrn Tran
Der erste Platz ging an das Team um die Herren Benjamin Birnbach, Sena Folivi und
Andrej Nüscheler.
Abbildung: Team um Herrn Birnbach, Herrn Folivi und Herrn Nüscheler
Astrid Stock | Sena FoliviFazit
Das Projekt war eine sehr spannende, interessante Erfahrung und eine kulturelle
Bereicherung. Die Meisterung dieses Projekts hat verdeutlicht, dass die im Studium
erworbenen Kompetenzen erfolgreich eingesetzt werden können. Es war möglich sich
weiteres Knowhow anzueignen, die Sprachkompetenzen anzuwenden, und weitere
Erfahrungen in Bezug auf Projektmanagement im internationalen Umfeld zu sammeln.
Schwierigkeiten gab es bei der Vereinbarung von Gruppentreffen mit den
Teammitgliedern aus Frankreich aufgrund von Terminkollisionen. Des Weiteren war es
eine große Herausforderung, einen funktionstüchtigen Roboter für die
Abschlusspräsentation fertigzustellen, da der Wettbewerb eine Entwicklungsperiode von
9 Monaten vorgesehen hat, die Semesterarbeit jedoch innerhalb von 3 Monaten realisiert
werden musste. Mit großem Durchhaltevermögen, einem straffen Zeitplan und guter
Teamarbeit, konnte das Projekt jedoch rechtzeitig und erfolgreich abgeschlossen werden.
Die Semesterarbeit und der darauffolgende Wettbewerb war ein krönender Abschluss
des Semesters. Besonders erfreulich war der Erhalt des Sonderpreises für besondere
Innovation. Alle Kernkompetenzen des Mechatronik Studiums konnten nochmals
angewandt werden. Zusätzlich diente es als gute Übung für die praktische Anwendung
von Projektmanagement und einer systematischen Vorgehensweise, welche für die
kommende Bachelorarbeit vorausgesetzt wird.
Empfehlung
Zum Schluss noch allgemeine Empfehlungen und Tipps für Studierende, welche die
Semesterarbeit noch vor sich haben. Es ist wichtig, ein Projekt zu wählen, für welches man
sich begeistern kann. Unser Projekt hat gezeigt, dass es sinnvoll ist, ein komplexes
Gesamtsystem in Submodule zu gliedern und diese dann unter den Teammitgliedern
aufzuteilen. Die Verantwortlichkeiten für die unterschiedlichen Submodule bzw.
Aufgabenbereiche sollten anschließend klar definiert werden. Es ist hier ebenfalls
wichtig, sich innerhalb der Gruppe auf eine klare Kommunikation zu einigen: die
Definition der richtigen Kommunikationskanäle und regelmäßige, festgelegte Treffen
(auch virtuell via Skype o.ä.) ermöglichen eine gute Kommunikation im Team und
vereinfachen die Überwachung des Fortschritts.
Weiterhin konnten wir gute Erfahrungen mit der Plattform „Trello“, einem
Projektmanagement-Tool, machen. Trello gibt den Teammitgliedern die Möglichkeit, sich
über den Stand des Projekts zu informieren und den eigenen Fortschritt zu
dokumentieren – online und für alle einsehbar.
Astrid Stock | Sena FoliviSie können auch lesen