Bulletin - Vereinigung der Schweizerischen Hochschuldozierenden
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Vereinigung der
Schweizerischen Hochschuldozierenden VSH
AEU Association Suisse
des Enseignant-e-s d’Université
Bulletin
Robotik
Robotique
Mit Beiträgen von
Herbert Bruderer
Roland Siegwart
Francesco Mondada
Laura Marchal-Crespo, Tobias Nef,
Raphael Sznitman, Lutz Nolte, Stefan Weber
Mehdi Snene
Elise Gortchacow
45. Jahrgang, Nr. 1 – April 2019
45ème année, no 1 – avril 2019
ISSN 1663–9898
Professor of Landscape Architecture
The Department of Architecture (www.arch.ethz.ch) at the ETH Zurich invites applications for the above-
mentioned position. The professorship is housed within the Institute for Landscape Architecture (ILA).
The new professor is called upon to impart to students the underlying principles, methodological insights,
and specific expertise of the field of landscape architecture design. She or he supervises doctoral
candidates, leads a group of employees, and is committed to the Department’s overall development,
above and beyond the interests of its own particular field. She or he accordingly engages in constructive
exchange on issues of teaching and research with peers and colleagues in the related disciplines.
As a rule, Master’s program lectures in the Department of Architecture are given in German or English.
Successful candidates are internationally renowned personalities, who represent an independent and
incisive position within current discourse, and have forged a substantial oeuvre in the field of landscape
architecture. Further requirements are a university degree, experience in teaching and research, and a
track record in landscape architecture professional practice proven by a convincing portfolio of personally
initiated and/or realized projects. Outstanding academic achievements must be complemented by a
demonstrable capacity for leadership.
Please apply online: www.facultyaffairs.ethz.ch
Applications should include a curriculum vitae, a list of publications and projects, a statement of future
research and teaching interests, and a description of the three most important achievements. The letter of
application should be addressed to the President of ETH Zurich, Prof. Dr. Joël Mesot. The closing date
for applications is 15 May 2019. ETH Zurich is an equal opportunity and family friendly employer and is
responsive to the needs of dual career couples. We specifically encourage women to apply.
Titelbild: E TH Zürich und Universität Zürich / Roboterhand Dextra / Roboterhand der Sensors research group (sensors.ini.uzh.ch)
Dextra nimmt die Welt in Superzeitlupe wahr und kann «Schere-Stein-Papier» spielen.
ii Stellenausschreibung – Poste à pourvoir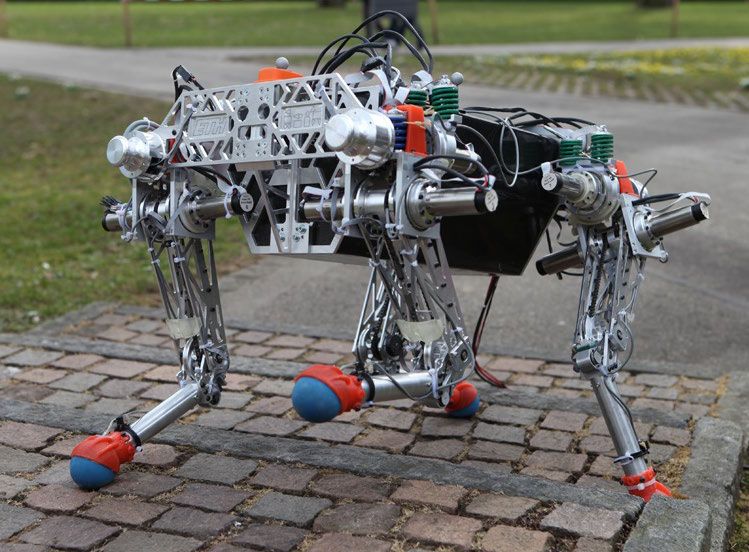
Inhaltsverzeichnis – Table des matières
Editorial 2
Gernot Kostorz
Robotik
Robotique
Ein Blick in die Frühgeschichte der Robotik 3
Herbert Bruderer
ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie 7
Roland Siegwart
Master in Robotics at EPFL 14
Francesco Mondada
Medizinrobotik. Forschung und Industrie in der Schweiz 15
Laura Marchal-Crespo, Tobias Nef , Raphael Sznitman,
Lutz Nolte, Stefan Weber
Cyberdéfense et sécurité digitale : Sommes-nous à l’abri ? 21
Mehdi Snene
Robots, empathie et émotions :
Nouveaux défis des relations entre l’humain et la machine 24
Elise Gortchacow
Jahresberichte der Hochschulen / Rapports annuels des Hautes Ecoles 32
Stellenausschreibungen / Postes à pourvoir ii, 6, 44
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 1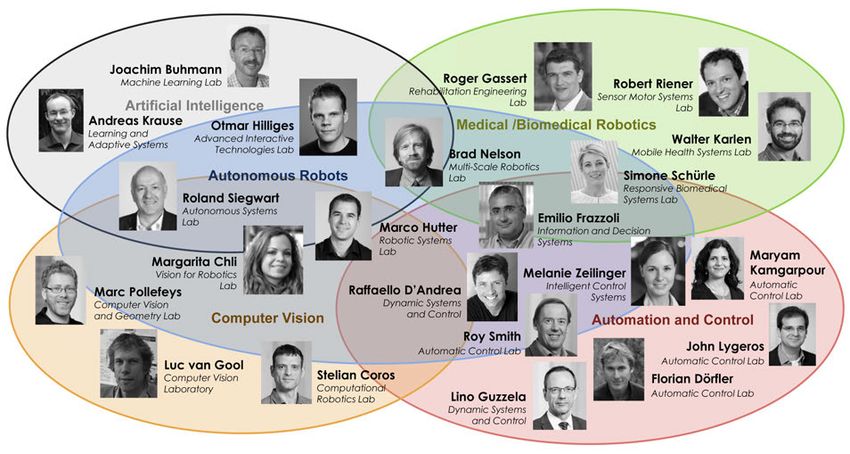
Editorial
Gernot Kostorz
Liebe Leserin, lieber Leser
«Traumberuf Robotiker» betitelte die ETH Zürich einen mehr überschaubar ist, eine «Intentionalität» zu, eine auf
Beitrag zum Auftakt des Herbstsemesters 2018. Zahlreiche den e rsten Blick «menschliche» Qualität. Genauer beschei-
Studienanfänger interessieren sich für ein Studium in Robo- det man sich jedoch damit, darunter eine unter Menschen
tik. Masterstudiengänge sind kürzlich an den beiden Eidge- gebräuchliche sprachliche Beschreibung von Aktionen zu
nössischen Technischen Hochschulen eingerichtet worden. verstehen, die aus unserer Sicht einem sinnvollen Zusam-
Im medizinischen Bereich nimmt die Robotik im Studium menhang entsprechen. Was dabei tatsächlich herauskommt,
«Medizintechnik» der Universität Bern einen hervorragen- bleibt jedoch vom Menschen vorgegeben, der auch die Ver-
den Platz ein. Entsprechend wird an allen drei Hochschulen antwortung trägt, obwohl man in ähnlicher Begriffsüber
auf höchstem Niveau geforscht. Es war also angebracht, ein tragung vom «Denken» der Maschine zu sprechen geneigt
Heft unserer Zeitschrift dem Thema «Robotik» zu widmen. ist. Damit wäre auch «Denken» auf «Rechnen» reduziert.
Diese Art der «Vermenschlichung» der Maschinen (durch
Der Gedanke, sich von einem technischen Gerät mit ge den Begriffswandel, der der Anwendung menschlicher
wissen menschenähnlichen Eigenschaften unterstützen zu Prädikate auf Maschinen zu «verdanken» ist, wie auch bei
lassen, ist wahrscheinlich so alt wie die Menschheit und in der Debatte über «Bewusstsein» oder «Gewissen») alimen-
unserer geographischen Umgebung seit der Antike über tiert auch die Diskussion über die «mechanische» Natur des
liefert. L eonardo da Vinci, der vor 500 Jahren starb, gilt – ne- Menschen als einer biologischen Maschine, deren Prozesse
ben seinen vielen anderen Leistungen – als ein Pionier der bei aller Komplexität wie bei Robotern auf Rechenoperatio-
Robotik am Beginn der Neuzeit. Entscheidend für die rasan- nen zurückzuführen sind.
te Entwicklung des Gebiets während der letzten Jahrzehn-
te sind die von Elektronik, Informatik und Miniaturisierung Ob Maschinen initiativ tätig werden können und – dann
gebotenen Fortschritte in Kontrolle und Steuerung bei der funktionell – sollen, ob sie sogar ohne identifizierbare
Herstellung und der Anwendung mechanischer Systeme. Instruktionen z.B. Verantwortung und Empathie entwickeln
Neben vielen rein maschinellen «dienstbaren Geistern», die können, ob sich ein Mensch einer Maschine «anvertrauen»
man nach Bedarf anstellen kann, fasziniert vor allem die Ent- kann, ob man vor intrinsischen oder spontanen «unmora-
wicklung menschenähnlicher «Geschöpfe», die mit nur noch lischen» Maschinenaktionen Angst haben muss, sind Fra-
wenig Fantasie bald in einem Zustand existieren könnten, der gen, die uns noch eine Weile beschäftigen werden. Hoff-
von demjenigen eines «natürlichen Menschen» nicht mehr nungen und Befürchtungen, die sich damit verbinden, sind
unterscheidbar ist. Die Auseinandersetzung mit den daraus letztlich eine Repräsentation der Unsicherheit über unsere
sich ergebenden Konsequenzen aller Arten beschäftigt zu- eigenen, «menschlichen» Fähigkeiten, die auch «Unmensch-
nehmend nahezu alle Fakultäten der Hochschulen. liches» einschliessen. Wenn wir befürchten, «sophisticated»
Maschinen könnten uns übel mitspielen, spiegelt sich darin
Die vorliegenden Beiträge dieser Ausgabe können nur eini- nur eine Angst vor uns selbst (und um uns selbst), denn die
ge wenige Aspekte beleuchten. Nach einem kleinen histori- Instruktionen, die wir der Maschine mitgeben, sind ja von
schen Auftakt folgen Darstellungen der Aktivitäten an den uns nach uns bekannten Konzepten entwickelt und können
drei erwähnten Hochschulen, gefolgt von Überlegungen zur bewusst nichts «Übermenschliches» beinhalten. Maschi-
Datensicherheit und – ausführlicher – zur Mensch-Maschi- nen sind wie Menschen aber auch anfällig auf Störungen
ne-Beziehung. und nicht prompt erkennbare Veränderungen und insofern
durchaus «unberechenbar». Es scheint eine müssige Frage
Überlegungen zum «Mensch-Maschine-Tandem» (Walther zu sein, ob Maschinen etwas denken, was wir nicht nachvoll-
Zimmerli) nehmen ihren Anfang mit Alan Turings Arbeit ziehen können. Bei unseren Mitmenschen sind wir daran ge-
über «Computing Machinery and Intelligence». Turing ver- wöhnt. Es ginge zu weit, vor Robotern mehr Angst zu haben
meidet eine Entscheidung, ob Maschinen «denken» können, als vor uns selbst.
schreibt ihnen aber eine auf funktioneller Kommunikation,
also der Fähigkeit, sinnvoll zu «antworten» (die Details der Es bleibt weiterhin wichtig darüber nachzudenken, wen oder
physikalisch ablaufenden Prozesse sind in den meisten Fällen was wir da «anstellen». Dazu finden sich vor allem im letzten
schon lange für Nichtspezialisten nicht mehr überschaubar) Beitrag viele Anregungen.
basierende «Maschinen-Intelligenz» zu. Dennett schreibt
technischen Systemen, deren Funktionalität auch nicht Ihr Gernot Kostorz
2 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019
Ein Blick in die Frühgeschichte der Robotik
Herbert Bruderer*
Was ist ein Automat, was ein Roboter? Wann be- nen und Instrumente (z.B. Wegmesser in Form eines
ginnt die Geschichte des Automatenbaus und der Schubkarrens, Webstuhl, Zirkel), Fluggeräte, Schiffe,
Robotik? Die Meinungen dazu gehen auseinander. Brücken, Kirchen, für den Städtebau und das Militär-
Die Frühgeschichte der Robotik fängt wohl mit dem wesen (z.B. Festungen, mit Seilrollen und Seilzügen
Aufkommen der ersten Automaten im Altertum an. gesteuerter Krieger, ein «Roboter»). Die Deutung der
Skizzen ist allerdings nicht immer einfach. Leonardo
Ursprünglich waren Roboter Geräte, Maschinen. hat u.a. einen mechanischen Löwen, einen mechani-
Manchmal haben sie eine menschenähnliche Gestalt. schen Vogel, eine mechanische Libelle, eine mecha-
Heute werden auch gewisse Programme so bezeich- nische Trommel, ein mechanische Fahrzeug (Auto),
net, vor allem (dialogfähige) Internet pro
gramme eine hydraulische Uhr, einen Drehkran und eine Flug-
(z.B. social bot, chatbot). «Intelligente» Staubsau- maschine entworfen.
ger, Rasenmäher und Melkmaschinen, Schachgerä-
te, selbststeuernde Fahrzeuge, Drohnen und viele Viele Modellbauer haben versucht, seine Entwür-
weitere Gegenstände gelten in den Medien und der fe umzusetzen. Der wohl bekannteste war Roberto
Werbung als Roboter. Der Ausdruck «Roboter» ist Guatelli, der neben zahlreichen Da-Vinci-Modellen
damit zu einem wenig aussagekräftigen Allerwelts- auch viele berühmte Rechenmaschinen (u.a. von
begriff geworden. Pascal, Leibniz, Babbage, Hollerith) nachgebaut hat.
Modelle sind beispielsweise in Florenz, Mailand, New
Dieser Beitrag vermittelt keinen Überblick über die York und Vinci zu sehen.
Geschichte der Robotik. Er beschränkt sich auf eini-
ge ausgewählte Objekte. Im Vordergrund stehen die 3. Kunstvolle Figurenautomaten
Figurenautomaten. Sie erlebten ihren Höhepunkt im Mit Jacques Vaucanson, der einen vollautomatischen
18. Jahrhundert mit prachtvollen Werken, die u.a. an mechanischen Webstuhl mit Lochkartensteuerung
Fürstenhöfen gezeigt wurden. geschaffen hat, beginnt eine lange Tradition in der
Fertigung von Figurenautomaten. Sie stellen meist
1. Herons Automatentheater Menschen oder Tiere dar. Vaucansons Meisterwerke
Automaten gab es schon im Altertum. Einer der be- (Ente, Querflötenspieler, Schalmeispieler) sind nicht
deutendsten Automatenbauer war Heron von Alex- erhalten. Die prächtige Hackbrettspielerin (1784)
andria (1. Jh.). Zu nennen ist etwa seine Dampfkugel,
ein früher Vorläufer der Dampfmaschine. Von ihm
stammt auch ein Pantograf mit einem Zahnradge- * Seehaldenstrasse 26, Postfach 47, 9401 Rorschach.
triebe. Damit lassen sich Zeichnungen vergrössern E-mail: bruderer@retired.ethz.ch; herbert.bruderer@bluewin.ch
und verkleinern. Am bekanntesten ist sein Automa- ORCID-Nr. 0000-0001-9862-1910
tentheater.
Herbert Bruderer, Prof. SG, Departement für Informatik,
ETH Zürich (i.R.), Technikhistoriker, Studium der Sprach- und
Manche dieser Maschinen enthielten eine program- Naturwissenschaften an mehreren in- und ausländischen
mierbare Walze, die schon in der Wasserorgel von Universitäten, Lehramtsdiplom, erste Berührung mit
Ktesibios von Alexandria (3. Jh. v. Chr.) auftaucht. Grossrechnern im Rechenzentrum des Europäischen
Zu den führenden frühen Automatenbauern z ählen Labors für Teilchenphysik (Cern), Genf (1970), Vorführung
ferner Philon von Byzanz, Ibn al Razzaz al-Jasari, des kalifornischen maschinellen Sprachübersetzungssystems
Systran(Russisch-Englisch) im Institut für Informatik der Universität
Salomon de Caus, Athanasius Kircher. Zürich (1975), Berater der Kommission der Europäischen Union für
automatische Sprachübersetzung, Brüssel und Luxemburg (1976–1981),
2. Leonardos Krieger Teilnehmer an der ersten Mikrocomputerschachweltmeisterschaft in
Leonardo da Vinci (1452–1519), der vor 500 Jahren London (1980), Gutachter der Stiftung Warentest (Berlin) für Infor-
gestorben ist, erstellte eine Fülle technischer Zeich- mationstechnik (1980–1999), Informatikdozent an der Zürcher
Hochschule für angewandte Wissenschaften (Winterthur), der
nungen (siehe Codex Atlanticus, Codex Madrid). Er Universität Zürich und der ETH Zürich (2000–2012), Kolumnist
kannte beispielsweise bereits das Zahnradgetriebe, der Communications of the ACM, New York, zahlreiche Bücher zur
die Zahnstange, die Kurvenscheibe, die Nürnberger Informatik. Schriften im Katalog der Deutschen Nationalbibliothek,
Schere sowie den Proportionalwinkel und soll auch http://tinyurl.com/y9bajqh5,
eine Rechenmaschine entworfen haben. Der Gelehr- und auf der Publikationsplattform der ETH Zürich,
te und Künstler hat Modelle ausgedacht für Maschi- https://www.research-collection.ethz.ch/
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 3
Herbert Bruderer | Ein Blick in die Frühgeschichte der Robotik
Abb. 1. Hackbrettspielerin (1784). Das Steuerwerk der prächti- Abb. 2. Allesschreibende Wundermaschine (1760). Das Steuer-
gen Zimbalspielerin von Peter Kintzing befindet sich nicht in werk dieses Handschriftautomaten von Wolfgang Knaus befin-
der Automatenfigur, sondern darunter (© Musée des arts et det sich in der (hier geöffneten) Weltkugel. Die kleine Messing
métiers/CNAM, Paris). figur (oben) ist mit einer Schreibfeder ausgestattet (© Techni-
sches Museum Wien).
von Peter Kintzing und David Roentgen befindet sich
im Musée des arts et métiers in Paris (vgl. Abb. 1). Die dien, der Zeichner wartet mit wählbaren Skizzen auf.
allesschreibende Wundermaschine (1760) verdanken Beim Schriftsteller lassen sich mit Hilfe von Nocken-
wir Friedrich Knaus. Sie steht im Technischen Mu- scheiben (innerhalb bestimmter Grenzen) beliebige
seum Wien (vgl. Abb. 2). Ein Vorläufer ist im Museo Texte programmieren.
Galileo in Florenz ausgestellt. Kaum bekannt ist der
Schriftsteller (1770) von Timothy Williamson, der im Die Wiener Kunstkammer beherbergt zahlreiche
Pekinger Palastmuseum aufbewahrt wird. grossartige Automaten, z.B. einen Schiffsautomaten
(vgl. Abb. 4),
Die Entwicklung erreichte ihren Höhepunkt mit dem
Dreigestirn von Pierre und Henri-Louis Jaquet-Droz
sowie Jean-Frédéric Leschot aus dem Jahr 1774. Die
bald 250-jährigen weltberühmten Figurenautomaten
– Musikerin, Schriftsteller und Zeichner – sind heute
noch voll funktionsfähig und werden regelmässig im
Musée d’art et d’histoire in Neuenburg vorgeführt
(vgl. Abb. 3). Die Musikerin spielt vorgegebene Melo-
Abb. 3. Figurenautomaten der Jaquet-Droz (1774). Die drei voll Abb. 4. Schiffsautomat (1785). Der Tischautomat von Hans
funktionsfähigen Androiden (Zeichner, Musikerin, Schriftsteller, Schlottheim rollt über den Tisch und spielt Musik. Die Kanonen
von links nach rechts) gelten als die weltweit schönsten und lassen sich mit Schwarzpulver laden (© Kunsthistorisches
ausgereiftesten Figurenautomaten (© Musée d’art et d’histoire, Museum, Wien).
Neuenburg).
4 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019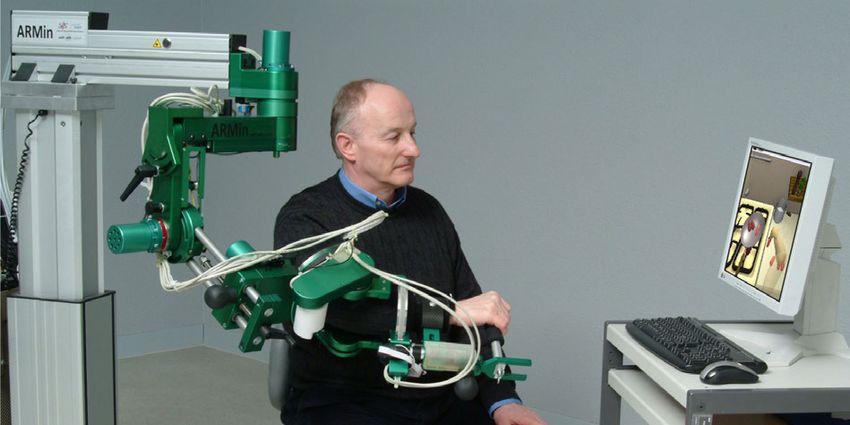
Herbert Bruderer | Ein Blick in die Frühgeschichte der Robotik
Abb. 5. Phonoliszt-Violine (1908). Der nach wie vor betriebs Abb. 7. Räderwerk von Antikythera. Diese rechnergestützte Re-
fähige Violinautomat der Firma Ludwig Hupfeld AG, Leipzig, konstruktion stammt von Tony Freeth. Links ist die Vorderseite
besteht aus einem Klavier und drei sich drehenden Geigen. Die mit den sieben Planetenzeigern, rechts die Rückseite mit den
Steuerung erfolgt über eine Papiernotenrolle (© Technisches Skalen für die Mond- und Sonnenfinsternisse (© Tony Freeth,
Museum Wien). Images first Ltd., London).
Für Unterhaltung sorgten auch vielfältige Musikauto Brüssel zur Schau gestellt wurde, ist in Madrid erhal-
maten, etwa großartige Violinmaschinen, die als ten. Der Schachtürke von Wolfgang von Kempelen
Weltwunder galten (vgl. Abb. 5). (1770) war eine Fälschung. Darin war ein Mensch
versteckt.
4. Schachautomaten von Torres Quevedo
Die erste funktionsfähige Schachmaschine (1920) ist 5. Räderwerk von Antikythera
das Werk von Leonardo Torres Quevedo (vgl. Abb. 6). 1901 kam bei einem Tauchgang vor der griechischen
Der Automat, der 1958 auf der Weltausstellung in Insel Antikythera eine rätselhafte astronomische
Rechenmaschine zum Vorschein, das Räderwerk
von Antikyhtera (vgl. Abb. 7). Erfinder, Baujahr und
Herstellungsort sind unbekannt. Die zerbrechlichen
Überreste, die seit Jahrzehnten Gegenstand der For-
schung sind, befinden sich in Athen. Manche be-
trachten dieses komplexe Zahnradgetriebe (vermut-
lich 1. Jh. v. Chr.) als ersten Analogrechner der Welt. n
Literatur und Quellen: siehe Seite 6
Abb. 6. Schachautomat von Leonardo Torres Quevedo (1920).
Norbert Wiener spielte 1951 auf der Pariser Kybernetikkonfe-
renz gegen diese Endspielmaschine (© Museo Leonardo Torres
Quevedo, Madrid).
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 5
Herbert Bruderer | Ein Blick in die Frühgeschichte der Robotik
Literatur und Quellen
Ausführliche Angaben zu historischen Automaten und wissenschaftlichen Instrumenten aus den Bereichen Mathematik,
Astronomie, Vermessung, Uhrmacherei und Musik finden Sie im folgenden Werk:
Herbert Bruderer: Meilensteine der Rechentechnik. Band 1: Mechanische Rechenmaschinen, Rechenschieber, historische
Automaten und wissenschaftliche Instrumente, 2., völlig neu bearbeitete und stark erweiterte Auflage, Walter de Gruyter
GmbH, Berlin/Boston 2018, XXIV, 727 Seiten, https://www.degruyter.com/view/product/480555
Herbert Bruderer: Meilensteine der Rechentechnik. Band 2: Erfindung des Computers, Elektronenrechner, Entwicklungen in
Deutschland, England und der Schweiz, 2., völlig neu bearbeitete und stark erweiterte Auflage, Walter de Gruyter GmbH,
Berlin/Boston 2018, XX, 829 Seiten, https://www.degruyter.com/view/product/503373
Modelle von Leonardo
Long Island Science Center, Riverhead, NY, https://www.sciencecenterli.org/davinciexhibition
Museo Leonardiano, Vinci, http://www.museoleonardiano.it/ita/museo/modelli, http://www.museoleonardiano.it/ita/model-
li-in-deposito/vedi-modelli
Museo Leonardo da Vinci, Florenz, http://museoleonardodavincifirenze.com/
Museo nazionale della scienza e della tecnologia «Leonardo da Vinci», Mailand, http://www.museoscienza.org/visitare/leonar-
do-parade/
Quellen
Nanni, Romano (Hg.): Leonardo and the artes mechanicae, Skira, Mailand 2013, 319 Seiten
Taglialagamba, Sara: Leonardo & engineering, CB edizioni [Cartei & Bianchi], Poggio a Caiano (Prato), 2010, 151 Seiten
Taglialagamba, Sara: Leonardo & l‘ingegneria, CB edizioni [Cartei & Bianchi], Poggio a Caiano (Prato) 2010, 151 Seiten
Taglialagamba, Sara: Leonardo da Vinci. Automazioni e robotica/Automations and robotics, CB edizioni [Cartei & Bianchi],
Poggio a Caiano (Prato), 2010, 160 Seiten
Stellenausschreibung - Poste à pourvoir
Professor of Mathematics and Physics
The Department of Mathematics (www.math.ethz.ch) and the Department of Physics (www.phys.ethz.ch) at
ETH Zurich invites applications for the above-mentioned position. The new professor will be based in the
Department of Mathematics and associated to the Department of Physics.
Applicants should demonstrate an outstanding research record and a proven ability to direct research work
of high quality. The successful candidate should have a strong background and a worldwide reputation in
mathematical physics as well as excellent teaching skills. Teaching responsibilities will mainly involve
undergraduate (German or English) and graduate courses (English) for students in mathematics, physics
and engineering.
Please apply online: www.facultyaffairs.ethz.ch
Applications should include a curriculum vitae, a list of publications, a statement of future research and
teaching interests, and a description of the three most important achievements. The letter of application
should be addressed to the President of ETH Zurich, Prof. Dr. Joël Mesot. The closing date for applications
is 15 September 2019. ETH Zurich is an equal opportunity and family friendly employer and is responsive to
the needs of dual career couples. We specifically encourage women to apply.
6 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019
ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie1
Roland Siegwart*
1. Vorbemerkung tionsroboter (ab 2003), Roland Siegwart – Mobile
Robotik ist heute in aller Munde, und die Gesellschaft Roboter (ab 2006), Fumiya Iida – Soft Robots (2009–
und Politik debattiert über Chancen und Risiken die- 2014), Jonas Buchli – Laufroboter (2012–2018), Raff
ser sich schnell entwickelnden Technologe. Zum Teil D’Andrea – Hochdynamische Flug und Balancier-Ro-
etwas unter dem Radar hat sich die Schweiz in den boter (2007), Roger Gassert – Medizinroboter (ab
letzten zwanzig Jahren zu einem weltweiten Power 2008), Margarita Chli – Visuelle Navigation (ab 2015),
haus für neue Robotik-Technologien entwickelt und Marco Hutter – Laufroboter (ab 2015) und Emilio
so optimale Voraussetzungen geschaffen, um die Frazzoli – Autonome Fahrzeuge (ab 2016) stark wei-
gesellschaftlichen und wirtschaftlichen Chancen ter und wurde durch Professoren wie Marc Pollefeys
in der Robotik zu nutzen. Wir haben die weltweit (ab 2007), O tmar Hilliges (ab 2013), Stelian Coros (ab
grösste Dichte an bestens ausgebildeten Talenten, 2017) und Davide Scaramuzza (ab 2012 an der Univer-
wissenschaftlichen Publikationen und Startups in sität Zürich) aus den Bereichen visuelle Wahrnehmung,
der Robotik. Durch verschiedene Schwerpunktpro- Mensch-Maschine-Schnittstelle, Computational Robo
gramme und Technologietransfer-Zentren haben wir tics und visuelle Navigation ergänzt. Weiter haben
ein Innovationsumfeld geschaffen, das einmalig ist Professoren wie Matthias Kohler, Fabio Gramazio und
und auch die grossen IT-Firmen in die Schweiz zieht. Philippe Block ein weltweit führendes Zentrum für
Robotik in der Architektur und im Bau aufgebaut.
2. Geschichte der Roboterforschung an
der ETH Zürich und EPFL Heute sind die ETH Zürich, aber auch die EPFL, unter
Robotik ist schon seit ca. 30 Jahren ein wichtiges The- den weltweiten Top-Adressen für Robotik. Die ETH
ma an den Technischen Hochschulen. So hat die EPFL Zürich prägt mit über zwanzig Forschungsgruppen,
im Rahmen des Departements für Microtechnique über hundert Doktorierenden und ca. 300 Master-
unter Leitung von Prof. Christof W. Burckhardt sich studierende aus der ganzen Welt, die neusten Ent-
Robotik schon in den frühen 1980er Jahren auf die
Fahne geschrieben und das Department für Maschi-
nenbau und Verfahrenstechnik der ETH Zürich hat * ETH Zürich, Institut für Robotik und Intelligente Systeme
1990 unter der Leitung von Prof. Gerhard Schweitzer LEE J 205, Leonhardstrasse 21, 8092 Zürich.
das Institut für Robotik gegründet. Weitere Expo- E-mail: rsiegwart@ethz.ch
nenten der aufstrebenden Robotikforschung waren
Roland Siegwart, Dr. sc. techn. ETH, ist seit Juli 2006
die EPFL-Professoren Jean-Daniel Nicoud (Bio-inspi- ordentlicher Professor für Autonome Systeme an der
rierte Intelligenz), Reymond Clavel (Parallelroboter) ETH Zürich und seit 2015 Co-Direktor des Wyss Zurich. Von
und Professor Rolf Pfeifer von der Universität Zürich Januar 2010 bis Dezember 2014 wirkte er als Vizepräsident
(Intelligenz und Embodiement). für Forschung und Wirtschaftsbeziehungen in der ETH
Schulleitung. Er ist im Verwaltungsrat mehrerer Firmen, wie
z.B. Komax AG und NZZ. Er schloss 1983 sein Diplom und 1989 seine
Eine Entwicklung der Robotik-Kompetenzen an den Doktorarbeit am Departement für Maschinenbau der ETH Zürich ab. Er
Schweizer Universitäten beschleunigte sich dann war mitbeteiligt beim Aufbau einer Startup Firma, war Professor an der
um die Jahrhundertwende und führte in den letzten EPFL Lausanne (1996 – 2006) und Gastforscher an der Stanford Universi-
20 Jahren zu einem Boom. An der EPFL entwickelte tät und am NASA Ames.
sich mit den Professoren Roland Siegwart (bis 2006), Er ist und war Koordinator mehrerer europäischer Projekte und Mit
gründer von einem halben Duzend Spin-offs. Er ist IEEE Fellow, Träger des
Dario Floreano, Aude Billard, Auke Iispert, Francesco
IEEE RAS Inaba Technical Award und Vorstandsmitglied der International
Mondada, Alcherio Martinoli und Jamie Paik ein Federation of Robotics Research (IFRR). Er ist im Editorboard verschiede-
Power-Haus. Zentrale Forschungsschwerpunkte sind ner Robotik-Journalen und war Chairman mehrerer Robotik-Konferenzen,
bioinspirierte Roboter, die fliegen und laufen, sowie darunter IROS 2002, AIM 2007, FSR 2007 und ISRR 2009.
lernende Roboter. Gleichzeitig entwickelten sich Roland Siegwart interessiert sich für die Entwicklung und Steuerung von
auch die Robotikkompetenzen an der ETH Zürich Robotersysteme die in komplexen und hochdynamischen Umgebun-
gen zum Einsatz kommen. Sein zentrales Ziel liegt in der Entwicklung
mit den Professoren Brad Nelson – Nanoroboter in neuer autonomer Roboter die mit unscharfer Information umgehen
der Medizin (ab 2002) , Robert Riener – Rehabilita- können, sich an neue Situationen anpassen und interaktive agieren.
Anwendungsbeispiele sind Service- und Raumfahrt-Roboter, autonome
Mikro-Fluggeräte, Roboter die laufen und schwimmen und Fahrer
1D
ieser Artikel erhebt nicht den Anspruch auf Vollständigkeit. Die assistenzsysteme. Er ist auch ein starker Promoter von Innovation und
Robotik in der Schweiz ist sehr dynamisch unterwegs und jeden Tag
Unternehmertum in der Schweiz.
entstehen neue Ideen, Programme und spannende Systeme.
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 7
Roland Siegwart | ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie
Abb. 2. Khepera Robot, Jean-Daniel Nicouds Lab, EPFL 1996.
Abb. 1. Parallelroboter Delta, Reymond Clavel, EPFL 1986.
wicklungen in der Robotik massgebend. Mit ihren Pi-
onierleistungen hat sie einer der grössten Präsenzen
an den wichtigsten Robotik Konferenzen wie ICRA ein departementsübergreifendes Masterprogramm an
oder IROS und gewinnt Awards für hervorragende der ETH Zürich anzubieten. Der spezialisierte Master
Publikationen und Forschende wie kaum eine andere in «Robotics, Systems and Control» (RSC) (http://
Universität in der Robotik. www.master-robotics.ethz.ch/) wurde im Herbst 2008
gemeinsam von den Departementen Maschinenbau
3. M
aster in Robotik der ETH Zürich zieht hunderte und Verfahrenstechnik (D-MAVT), Informationstech-
von Studierenden aus der ganzen Welt an nologie und Elektrotechnik (D-ITET) und Informatik
Die Lehre und Forschung in der Robotik war schon seit (D-INFK) lanciert. Schon im Herbst 2009 starteten die
Mitte der 1980 Jahre in verschiedenen Gruppen der ETH ersten Studierenden. Heute repräsentiert der Master in
Zürich ein Thema, vor allem am Labor von Prof. Schwei- «Robotics, Systems and Control» den grössten spezia-
zer im Department Maschinenbau und Verfahrenstech- lisierten Master der ETH Zürich und einen der grössten
nik. Durch das schnelle Wachstum der Robotikgruppen insgesamt. Ca. 130 Studierende starten heute jedes Jahr
nach die Jahrhundertwende kam das Bedürfnisse auf, ihr Masterstudium in Robotik und ca. weitere 100 Stu-
Abb. 3. Ping-Pong- und kollaborativer Robot, Gerhard Schweizers Lab, ETH 1988 / 1993.
8 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019Roland Siegwart | ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie
Abb. 4. Die Kernprofessuren in Robotics, Systems and Control an der ETH Zürich.
dierende aus dem Maschinenbau wählen ihren Fokus der Robotik entwickelt. Neben den Lehr- und For-
von Vorlesungen und Projekten in der Robotik. schungsaktivitäten an der ETH Zürich, EPFL und den
Fachhochschulen haben die vom Nationalfonds ge-
Die Zulassung zum spezialisierten Master-Studiengang förderten Nationalen Forschungsschwerpunkte (NFS/
in Robotik setzt ein Bachelor-Diplom in einer ingeni- NCCR) «Robotics» und «Digital Fabrication» die
eurwissenschaftlichen Studienrichtung und gute Leis- weltweite Strahlkraft verstärkt. Das NFS «
Robotics»
tungen voraus. Zu diesen Studienrichtungen gehören (www.nccr-robotics.ch) beschäftigt sich institutions
insbesondere Elektroingenieurwissenschaften und In- übergreifend mit den Grundlagen für Robotersyste
formationstechnologie, Informatik und Maschinenin- me: Einerseits fokussiert es sich auf den Einsatz von
genieurwissenschaften. Aber auch exzellent Studieren- Robotern bei Katastrophen und andererseits auf Pro-
de aus anderen Studienrichtungen wie Gesundheits- thesen und Exoskelette für die Unterstützung von
wissenschaften oder Physik werden aufgenommen. Menschen. Das von ETH-Architekten initiierte NFS
«Digital Fabrication» (www.dfab.ch) beschäftigt sich
4. Forschungszentren, Initiativen und Startups mit der Revolution von Bauprozessen durch digitale
in der Robotik Technologien – und zwar insbesondere in der Robotik.
In den vergangenen Jahren hat sich die Schweiz zu
einem weltweit höchst anerkannten Schmelztiegel Kürzlich wurde im Rahmen der «ETH+»-Initiative ein
Abb. 5. Die wichtigsten Institutionen, Programme und Startups in der Robotik.
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 9Roland Siegwart | ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie
Abb. 6. Flugroboter: Erster Quadrotor, AtlantikSolar, Balancier-Drohne, Voliro.
Robotik-Zentrum bewilligt, das den Aufbau weiterer hundertwende durch Pionierleistungen der Labors von
Forschungsgruppen und einer departementsüber- Professor Dario Floreano2 und Professor Roland Sieg-
greifenden Technologieplattform ermöglichen soll. wart3 ihre Anfänge genommen hat, entwickelten sich
Ein zentrales Element des Zentrums ist die enge For- die Flugroboter (siehe Abb. 6) an der ETH Zürich und
schungszusammenarbeit mit der Industrie und Part- EPFL rasant. 2008 wurden an der ETH zum ersten Mal
nern aus der ganzen Welt. Solarflugzeuge gezeigt, die mit einem Gewicht von nur
wenigen Kilogramm kontinuierlich fliegen konnten.
Die hervorragenden Forschungsresultate haben zu ei- Ausserdem wurden Helikopterdrohnen demonstriert,
nem regelrechten Boom von Spin-offs von der ETH Zü- die fähig waren, mit nur einer einzigen Kamera präzise
rich und EPFL geführt. Heute hat die Schweiz die wahr- zu navigieren. Gleichzeitig sind mit Sensefly4 und Sky
scheinlich grösste Dichte an Robotik-Startups (siehe botix5 aus den Labors der Professoren Floreano und
Abb. 5). Diese Entwicklung wurde massgebend durch Siegwart die ersten zwei Spin-offs entstanden. Mit
Programme wie die des «Pioneer Fellowships» (ETH Professor D’Andrea kam ab 2007 eine weitere Dimen-
Zürich), «Innogrants» (EPFL), «Bridges» (Nationalfond/ sion des dynamischen Flugs mit Helikopter-Drohnen
Innosuisse) oder «Venture Kicks» unterstützt. Diese dazu. Seine durch visuelles Tracking geführten Droh-
Programme zielen auf die Beschleunigung des Techno- nen spielen Ping-Pong, balancieren Stäbe oder bauen
logietransfers von vielversprechenden Forschungsresul- Seilbrücken. Aus diesen Forschungsaktivitäten, deren
taten ab. Des Weiteren wurde über das «Wyss Zurich» Videos sich viral verbreiteten, ist dann das Startup
(www.wysszurich.ch), dem gemeinsamen Technologie- Verity Studios entstanden. Die Verity Studios demons-
transfer-Institut der ETH Zürich und der Universität trieren heute magische Flugshows an Konzerten oder
Zürich, ein entscheidender Boost von Robotik-Spin-offs im Zirkus.
ermöglicht. Das Wyss Zurich entstand dank der gross-
zügigen Donation von Hansjörg Wyss.
5. Robotik-Forschung der ETH Zürich – 2 ultra-leichte Flächenflugzeuge.
3 weltweit erster frei fliegender Quadrotor.
einige Highlights
4E PFL Spin-off, Flächenflugzeug für Luftaufnahmen –
5.1. Pioniere der Drohnen https://www.sensefly.com/
Nachdem die Drohnenforschung kurz nach der Jahr- 5 ETH Spin-off, aufgekauft von GoPro.
10 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019Roland Siegwart | ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie
Abb. 7. Laufroboter: StarlETH und ANYmal.
Weitere Pionierleistungen haben zur Gründung der Jahren hat die ETH Zürich daher begonnen, neue Kon-
Startups Flyability 6 und Wingtra7 geführt. B eide F irmen zepte für die Roboter-Fortbewegung auf Beinen zu ent
haben sich rasant entwickelt und liefern heute weltweit wickeln. Der Startschuss dafür fiel im Labor von Pro-
Drohnen von höchster Qualität. Die neuesten Entwick- fessor R
oland Siegwart. Seit 2015 wird diese Forschung
lungen an der ETH sind Drohnen, die in allen möglichen durch Professor Marco Hutter verstärkt und weiterge-
Orientierungen in sämtliche Himmelsrichtungen flie- führt. Resultate sind unter anderem die ETH-Roboter
gen und dadurch auch mit ihrer Umgebung in Kontakt StarlETH und ANYmal (siehe Abb. 7). Beide verfügen
treten können. Diese Bewegung ermöglicht vollkom- über «weiche» Antriebsmodule, welche einen sanften
men neue Einsätze von Drohnen. Das Spin-off Voliro8 und nachgiebigen Kontakt mit der Umgebung ermög-
gehört zu den Vorreitern in diesem Bereich. lichen. Dank zahlreicher Durchbrüche hat sich die ETH
Zürich in den vergangenen Jahren zu einer der führen-
5.2. Der Roboter-Hund den Forschungsinstitutionen dieses Bereichs entwickelt.
Roboter auf Rädern sind in ihren Bewegungsmöglich- Seit 2016 werden vierbeinige Roboter zudem über das
keiten sehr eingeschränkt. Fliegende Roboter können Startup ANYbotics9 erfolgreich kommerzialisiert.
nur sehr kleine Nutzlasten tragen und sind in der In-
teraktion mit ihrer Umgebung begrenzt. Vor über zehn 5.3. Roboter für die Baustelle
Der Bereich Baustelle durfte in den vergangenen Jahr-
6E
PFL Spin-off, Kollisionsresistente Dohnen – zehnten nur sehr wenig Innovation erfahren. Genau
https://www.flyability.com/ diesen Umstand hat die ETH Zürich in den vergange-
7E
TH Spin-off, Hybride Drohne die vertikal startet und dann in den
Flächenflug übergeht – https://wingtra.com/
nen Jahren geändert: Durch die Initianten Professor
8E
TH Spin-off (in Gründung), Omnidirektionale Drohne –
https://www.voliro.ch/ 9 ETH Spin-off, Laufroboter – https://www.anybotics.com/
Abb. 8. Konstruktionsroboter: HEAP und Roboter für den Aufbau gewölbter Armierungen.
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 11Roland Siegwart | ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie
Matthias Kohler und Professor Fabio Gramazio konnte mechanische Interventionen durchführen. Diese Vi-
sich die Hochschule zu einem weltweiten Leader und sion steht hinter den einmaligen Forschungsaktivitä-
Leuchtturm in punkto Digitalisierung und Automatisie- ten von Professor Brad Nelson. Seine Robotersyste-
rung der Baustelle entwickeln. Im Speziellen erlauben me sind oft nur einige Millimeter gross und können
Roboter heute ganz neue Bauformen und Materialen. durch externe Magnetfelder mit höchster Präzision
Der autonome Schreitbagger HEAP (Hydraulic Excava- im Auge oder in Blutbahnen gesteuert werden.
tor for an Autonomous Purpose, siehe Abb. 8) aus der
Gruppe von Professor Marco Hutter beispielsweise, er- Roboter sind heute bereits hochpräzise Helfer im
möglicht eine sichere Intervention in gefährlichen Um- Operationssaal und ermöglichen ganze neue The-
gebungen, wie zum Beispiel nach einem Erdrutsch oder rapiemethoden. Die Professoren Robert Riener und
einer Katastrophe. Und im NSF «Digital Fabrication» Roger Gassert forschen an Rehabilitations-Robotern
entstehen in einem interdisziplinären Team neue Bau- und an Exoskeletten, die gehbehinderten Menschen
prozesse, die zum Beispiel den Bau gewölbter Mauern das Laufen wieder ermöglichen sollen. Diese Aktivitä-
ohne Schalungen ermöglichen. Dabei bauen Roboter ten waren auch der Grundstein für die Initiierung des
mit höchster Präzision Armierungen auf, welche an- Cybathlons10, einem internationalen Wettbewerb, der
schliessend mit Spezialbeton aufgegossen werden. die Entwicklungen von Technologien für behinderte
Menschen beschleunigen soll. Das Echo auf die erste
5.4. Roboter im menschlichen Körper und Durchführung im Jahr 2016 war enorm und die Vor-
für die Rehabilitation bereitungen für die Veranstaltung im Jahr 2020 laufen
Stellen Sie sich vor, wir hätten kleine Roboter, die auf Hochtouren.
sich im menschlichen Körper bewegen, Messungen
machen und gezielt Medikamente einbringen oder 10 http://www.cybathlon.ethz.ch
Abb. 9. Roboter in der Medizin: Micro-Roboter, Exoskelette, Rehabilitationsroboter.
12 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019Roland Siegwart | ETH Zürich und die Schweiz, ein Schmelztiegel für Robotik-Technologie
Abb. 10. Precision Farming mit Robotern: EU Projekt Flourish und Swiss Smart Farming von DigitalSwitzerland.
5.5. Roboter in der Landwirtschaft für eine präzise Intervention, beispielsweise für die me-
Die Ernährungssicherheit der stetig wachsenden chanische Entfernung von unerwünschten Pflanzen.
Weltbevölkerung ist wahrscheinlich eine der gröss-
ten Herausforderungen der kommenden Jahrzehnte. 6. Faszination Unternehmertum und Startups
Technologie kann uns dabei helfen, das Wachstum Die bahnbrechenden Forschungsaktivitäten der ver
von Nährpflanzen auf Feldern kontinuierlich zu über- gangenen 20 Jahre haben in der Robotik zu zahlrei-
wachen. Auf diese Weise liessen sich Umstände wie chen sich auf dem Weltmarkt sehr gut entwickelnden
Wassermangel, Düngerbedarf oder etwa ein Schäd- Startups geführt (siehe Abb. 5). Mit ihnen entstan-
lingsbefall frühzeitig erkennen. Roboter würden da- den nicht nur rund 1000 neue und sehr spannende
mit eine nachhaltige Landwirtschaft ermöglichen, die Arbeitsplätze, sie legten auch den Grundstein für das
mit weniger Dünnungsmitteln und minimaler Ein- «Silicon Valley der Robotik».13
bringung von Pestiziden auskommt.
Die internationale Führerschaft und die grosse An
Im Labor von Professor Roland Siegwart werden in zahl Talente in Bereichen der visuellen Navigation
starken Partnerschaften mit Agronomie-Forschern wie und dem maschinellen Lernen haben auch die
Professor Achim Walter neue Konzepte für das «Pre- grossen IT-Firmen in die Schweiz gezogen. Google,
cision Farming» erforscht und im Feld getestet.11,12 Facebook-Oculus oder Microsoft haben in Zürich
Flugroboter überwachen dabei die Felder mit Spektral Forschungslabors aufgebaut, die das Ökosystem der
kameras und Bodenroboter nutzen diese Information Robotik und der Künstlichen Intelligenz weiter be
flügeln. n
11 EU Projekt Fourish – http://flourish-project.eu/
12 Matterhorn Project von Digital Switzerland: Swiss Smart Farming –
http://www.smartfarming.ethz.ch/ 13 http://www.jordico.com/30-disruptive-swiss-startups-in-robotics/
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 13Master in Robotics at EPFL
Francesco Mondada*
Since the academic year 2018–2019, students at the A strong emphasis of this new Master is on practice:
Ecole Polytechnique Fédérale de Lausanne (EPFL) can mandatory and elective courses include practical
follow a new Master degree in robotics, which is the exercises to apply theoretical aspects to real systems.
result of a renewed effort by the EPFL research and Moreover, the semester and interdisciplinary projects,
education community active in this field, coordinated as well as the final year project, allow students to work
around the “Robotics” National Research Competence with researchers on complex problems in the robot-
Centre (NCCR). This new degree offers training in the ics laboratories of EPFL. It is important to note that
theory, technology and practice of robotics, covering this Master degree is one of the few EPFL Masters that
for example mobile robotics, portable robots, robotic offer the possibility of carrying out three projects (10
manipulators, autonomous robots, biomedical robot- ECTS) in laboratories at master level, in addition to
ics, and the interface between robots and the human the final year project. Students can also choose to
nervous system. spend part of their studies in industry, with a 6-month
internship.
This comprehensive course provides EPFL students
with access to research and industrial careers in a
wide range of fields where robotics technologies are
increasingly applied, such as biomedical technologies,
logistics and transport, aviation and drones, autono-
mous cars, industry 4.0, smart homes, environmental
technologies, to name a few. In addition, students can
take advantage of EPFL’s strong innovation ecosystem
to invent new robotic systems and applications and
create their own business.
Concerning admissions: Students with a Bachelor
degree in Microengineering from EPFL are automati
cally admitted. National, international, and EPFL
Figure. During their master’s final project, students were asked to develop and
clinically evaluate a neuro-controlled upper limb prosthesis intuitively controlled
students with a Bachelor in Computer Science, Elec
and felt by the amputee as the natural one (courtesy of Silvestro Micera’s lab, EPFL). trical Engineering, Electronics, Mechanical Engineer
ing or a related field may also apply and will be selected
on the basis of their academic record. All students
* EPFL - STI - IMT – LSRO, bureau MEB3426, Station 9, 1015 Lausanne must have an interdisciplinary background and have
taken courses in at least two of these fields: Computer
E-mail: francesco.mondada@epfl.ch
EPFL: www.epfl.ch Science, Electronics, and Mechanical Engineering. n
Robotics master: http://master.epfl.ch/robotics/
More information: http://master.epfl.ch/robotics
Francesco Mondada, Ph.D., is a Professor in mobile
robot design at the Ecole Polytechnique Fédérale
de Lausanne (EPFL) and coordinator of the Robotics
Master. He received his M.Sc. in micro-engineering
and his Doctoral degree in computer science from
EPFL. He co-founded several companies, being CEO
of K-Team SA for about 5 years. He has been participating, then
leading the design of well know robots, such as Khepera, s-bot,
marXbot, e-puck and Thymio, together reaching more than 10
thousands mentions/citations in scientific papers. His interests
include the development of innovative mechatronic solutions
for mobile robotics and making robot platforms more acces-
sible for education, research, and industry.
14 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019Medizinrobotik. Forschung und Industrie in der Schweiz
Laura Marchal-Crespo*, Tobias Nef **, Raphael Sznitman***,
Lutz Nolte****, Stefan Weber*****
„Der Wissenschaftler beschreibt was ist; * ARTORG Center for Biomedical Engineering Research,
der Ingenieur erschafft, was noch nie war.“ Universität Bern, Murtenstrasse 50, 3008 Bern.
–Theodore von Kármán E-mail: laura.marchal@artorg.unibe.ch
http://www.artorg.unibe.ch/research/mln/index_eng.html
ORCID 0000-0002-8008-5803
1. Einführung
Laura Marchal-Crespo, Ph.D., ist SNF-Professorin am ARTORG
Medizinrobotik ist in der Öffentlichkeit ein allgegen- Center for Biomedical Engineering Research der Universität
wärtiges Thema. Aktuell verdichten sich bemerkens- Bern und Leiterin der Gruppe Motor Learning und Neurore-
werte Fortschritte in der technischen und klinischen habilitation und angegliedert an die Gruppe Sensory-Motor
Forschung (Stichwort künstliche Intelligenz) zu vie- Systems in der Abteilung Health Sciences and Technology der
len neuen Anwendungen und Systemen. Medizinro- ETH Zürich. Geboren 1980 in Barcelona, folgte das Studium
zum BSc Industrial Engineering (5J) mit Schwerpunkt Automatisierung und
boter lassen sich grob in drei Kategorien unterteilen:
Robotik, Technical University of Catalonia, UPC, Barcelona, Spain. Dann
Chirurgisch-interventionelle Systeme, Systeme für Master’s und Promotion in Mechanical and Aerospace Engineering an der
die physische Rehabilitation sowie Assistenzsyste- University of California at Irvine, U.S.A. zum Thema haptisch angeleitete
me für körperlich eingeschränkte Menschen auf der Lernprogramme für die Nutzung von Robotik-unterstützten Rollstühlen für
Basis mechatronischer und robotischer Ansätze. An schwerbehinderte Kinder. Arbeit in der Forschungsgruppe Sensory-Motor
der Universität Bern konzentriert sich die Forschung Systems in der Abteilung Health Sciences and Technology der ETH Zürich.
Seit 2017 Förderung durch den Schweizer Nationalfond als Assistenzprofes-
auf die ersten beiden Themenbereiche, die daher im sorin mit dem Forschungsschwerpunkt: Schnittstelle Mensch – Maschine
Fokus dieses Artikels stehen. und Lernen in biologischen Systemen, Nutzung von Robotik und virtueller
Realität zur Unterstützung in der Rehabilitation nach Hirnverletzungen.
Robotik- und computergestützte Verfahren für Preise und Auszeichnungen: Über 50 Veröffentlichungen in führenden
chirur gische und interventionelle Anwendungen ingenieur- und neurowissenschaftlichen Publikationen. Beste Veröffent-
lichung bei der Biorob 2016, University of California Dean’s Dissertation
werden seit 30 Jahren entwickelt. Sie helfen einem
Fellowship 2009, Fundación Caja Madrid Postgraduate Fellowship 2009.
Operateur, Instrumente räumlich exakt auszurich-
ten und im Körper zu dirigieren oder vorgeplante ** ARTORG Center for Biomedical Engineering Research,
Aufgaben, wie Bohren, Fräsen, Sägen, präzise umzu- Universität Bern, Murtenstrasse 50, 3008 Bern.
setzen. Eine Vielzahl dieser Systeme ist kommerzia- E-mail: tobias.nef@artorg.unibe.ch
lisiert worden und hat weltweit Einzug in die Ope- http://www.artorg.unibe.ch/research/ger/index_eng.html
rationssäle gehalten. Prominenteste Vertreter sind ORCID 0000-0002-8069-9450
das telemanipulatorische System daVinci (Intuitive
Tobias Nef, Dr.sc.nat. ETH, ist ausserordentlicher Professor für
Surgical Inc., U.S.A.) und das Mako System für die
Gerontechnologie und Rehabilitation an der Universität Bern
orthopädische Endoprothethik (Stryker Inc., USA). und am Inselspital. Geboren 1977 in Flawil, St. Gallen. 1999
Routinemässig werden in vielen Schweizer Spitälern Studium der Elektrotechnik an der ETH Lausanne, gefolgt von
sowie weltweit robotische Eingriffe, zum Beispiel bei Promotion in biomedizinischer Technik an der ETH Zürich in
Prostatakrebs oder zu Hüft- und Knieimplantatio- 2007. 2009 Ruf an das National Rehabilitation Institute, Was-
nen, durchgeführt. hington D.C. (U.S.A.). Ruf 2010 an die Universität Bern, Gründung und Lei-
tung Forschungsgruppe Gerontechnologie und Rehabilitation am ARTORG
Center for Biomedical Engineering Research der Universität Bern und am
Die zweite Kategorie sind Systeme für die physische Inselspital.
Rehabilitation von Patienten, zum Beispiel nach Forschungsschwerpunkte: Technologische Systeme für die Rehabilitation
Schlaganfällen. Diese Roboter führen selbständig, von hirnverletzten Patienten und Patienten mit neurodegenerativen Er-
wiederholt und ohne Abweichung Bewegungen krankungen. Unter anderem auch die Nutzung von Rehabilitationsrobotik,
Telerehabilitation und Monitoring-Technologien.
durch, die nicht durch einen Patienten ausgelöst
Preise und Auszeichnungen: Autor und Erfinder von ber 80 Veröffent-
werden müssen und mittels Variation von Bewe- lichungen in Fachzeitschriften, Buchkapiteln und Monografien und
gungsgeschwindigkeit und Trainingsdauer einen Patenten. Wissenschaftliche Leitung der alljährlichen «Brainweek» in Bern,
Therapieeffekt erzielen. Im Bereich der Rehabilita als Initiative der European Dana Alliance for the Brain mit dem Ziel, die in-
tionsmedizin sind zwei Schweizer Firmen H ocoma teressierte Öffentlichkeit über das Gehirn und die Fortschritte in den Neu-
AG und Reha Technology AG führend. Sie sind rowissenschaften zu informieren. Mitglied verschiedener F achgesellschaften
und Präsident der Klinischen Neurowissenschaften Bern. ABB Research
weltweit in Kliniken und Rehabilitationszentren Award 2009, Hans-Eggenberger Award 2008, Swiss Technology Award 2006,
mit Systemen zur Arm- und Beinrehabilitation von Wertheimer Preis 2016 und der HumanTech Innovationspreis 2005.
Patienten vertreten.
VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019 15Laura Marchal-Crespo et al. | Medizinrobotik. Forschung und Industrie in der Schweiz
*** ARTORG Center for Biomedical Engineering Research, und Betreuung weiterer Start-Ups im Bereich bildgestützter
Universität Bern, Murtenstrasse 50, 3008 Bern. interventioneller Anwendungen. Zusätzlich zu den Aufgaben in
leitender Forschungsfunktion: Von 2001–17 Mitglied und ab 2013
E-mail: raphael.sznitman@artorg.unibe.ch
Vizepräsident der Kommission für Technologie und Innovation
http://www.artorg.unibe.ch/research/otl/index_eng.html
(KTI). Seit 2018 Experte der föderalen Innovationsagentur Inno-
ORCID 0000-0001-6791-4753 suisse. Von 1997–2018 Mitgründer und Mitglied im Vorstand des
Berufsverbands der Medtech Industrie Medical Cluster (ab 2017
Raphael Sznitman, Ph.D., ist Assistenzprofessor
Swiss Medtech). 2006 Gründung des «Competence Center for
am ARTORG Center for Biomedical Engineering
Medical Technology» zum nachhaltigen Technologietransfer von
Research der Universität Bern und Gruppenleiter der
Forschungsergebnissen in der Medizintechnik.
Gruppe Opthalmic Technology Laboratory (OTL).
Preise und Auszeichnungen: Autor und Erfinder von über 300
Geboren 1985 in New York, Studium B.Sc. Cognitive
wissenschaftlichen Veröffentlichungen und Patenten. Swiss
Systems in Computational Intelligence (2003, Univer-
Technology Award mit Medivision AG 1995, Maurice E. Müller
sity of British Columbia, Canada) danach MSc und PhD (2009) in
Award for Excellence in Computer Assisted Surgery 2001. Seit
Computer Science an der Johns Hopkins University (Baltimore,
2013 Mitglied der Schweizerischen Akademie der Technischen
USA). 2011 Post-doctoral Fellowship im Computer Vision Labor,
Wissenschaften.
ETH Lausanne. 2014 als Gruppenleiter am ARTORG Center und
seit 2016 Assistenzprofessur an der Universität Bern.
***** ARTORG Center for Biomedical Engineering Research,
Forschungsschwerpunkte: Anwendung von künstlicher Intelli-
Universität Bern, Murtenstrasse 50, 3008 Bern.
genz zur Entwicklung schnellerer und präziserer Diagnoseverfah-
ren für die klinische Betreuung von Patienten mit chronischen E-mail: stefan.weber@artorg.unibe.ch
Augenleiden wie Glaukom, Makuladegeneration und diabeti- http://www.artorg.unibe.ch/research/igt/index_eng.html
scher Retinopathie.
ORCID 0000-0002-0395-7102
Kommerzielle Aktivitäten: Translation von Forschungsergebnis-
sen durch die Entwicklung, klinische Validierung und Zulassung Stefan Weber, Dr.-Ing., ist ordentlicher Professor
von KI-basierten Medizinprodukten für die Ophthalmologie. und Direktor des ARTORG Center for Biomedical
Vermarktung von RetiNet für die Diagnose von Makuladegene- Engineering Research der Universität Bern. Geboren
ration durch RetinAI Medical AG. 1972 in Erfurt, Studium an der Technischen Uni-
Preise und Auszeichnungen: Autor von über 50 Forschungs versität Ilmenau zum Dipl.-Ing. Automatisierung
artikeln und Erfinder von Patenten im Bereich KI Anwendungen. und Robotik. 1999 als Fulbright Stipendiat an der
2. Platz Ypsomed Innovationspreis des Ypsomed Innovations- University of Southern California, Los Angeles USA. Promotion
fonds 2019, 1. Platz bei der MICCAI 2015 EndoVision Challenge, 2004 an der Humboldt Universität zu Berlin über medizinische
Preis für beste Lehre, JHU 2008, Mitgewinner der JHU Computer Visualisierungsverfahren. 2005 – 2008 Zeit als Gruppenleiter
Vision Grand Challenge 2008. und Vize-Direktor des Zentralinstitutes für Medizintechnik der
Technischen Universität München. 2008 erfolgte der Ruf an die
**** ARTORG Center for Biomedical Engineering Research, Universität Bern, Assistenzprofessur für Implantationstechnolo-
Universität Bern, Murtenstrasse 50, 3008 Bern. gie, 2012 Ordinariat und Berufung auf den Lehrstuhl für bildge
stützte medizinische Verfahren.
E-mail: lutz.nolte@artorg.unibe.ch
Forschungsschwerpunkte: Bildgestützte, robotische Verfahren
http://www.artorg.unibe.ch/research/otl/index_eng.html
in der Chirurgie mit Schwerpunkt HNO- und Leberchirurgie, mit
Lutz-P. Nolte, Dr.-Ing., ist Professor emeritus für Ziel der erfolgreichen Einführung disruptiver Technologien in die
Chirurgische Technologien und Biomechanik der klinische Anwendung und damit einhergehende Paradigmen-
Universität Bern. Geboren 1954 in Minden West wechsel in den Behandlungsmöglichkeiten. Etablierung neuer
falen, Studium an der Ruhr-Universität Bochum zum Verfahren in der Klinik im Bereich onkologischer Interventionen
Dipl.-Ing 1980 und Promotion zum Dr.-Ing. 1983 in der Leber und bei der robotischen Cochlear-Implantation.
im Fach Konstruktiver Ingenieurbau. Von 1984–87 Kommerzielle Aktivitäten: CAS-One IR™, Otoplan™ und HEARO™
Leitung der «Nonlinear Shell Research» Forschungsgruppe sind Medizintechnologien, die aus dem ARTORG hervorge-
am Institut für Mechanik. 1987 Gründung und Leitung der gangen sind und durch CAScination AG weiterentwickelt,
Gruppe für Orthopädische Forschung mit Schwerpunkt Wirbel produziert und vertrieben werden. Aktive Unterstützung von
säulenbiomechanik. 1990 Ruf an die Wayne State University in Neuausgründungen vom ARTORG und der Universität Bern
Detroit, MI, USA, als Assoziierter Professor für Maschinenbau in den Bereichen Medizintechnik, Diagnostik und künstlicher
am Bioengineering Center. 1993 Ruf an die Universität Bern und Intelligenz.
Übernahme der Abteilung für Orthopädische Biomechanik am Preise und Auszeichnungen: Autor und Erfinder von über 100
Maurice E. Müller Institut. 2002 Ordinariat und Direktion des wissenschaftlichen Veröffentlichungen und Patenten. Präsident
Instituts für Chirurgische Technologien und Biomechanik an der deutschsprachigen Gesellschaft für computer- und roboter-
der medizinischen Fakultät der Universität Bern. Von 2001–13 gestützte Chirurgie (CURAC) und Mitglied des IEEE. Finalist The
Mitgründer und Ko-Direktor des Nationalen Forschungszentrums Hamlyn Symposium – Surgical Robotic Challenge 2018, Gewin-
«Computer Aided and Image Guided Medical Interventions». ner CTI Medtech Award Switzerland mit CAScination AG 2013,
Von 2007-12 Mitgründer und erster Direktor des «Artificial Organ Gewinner Ypsomed Innovationspreis des Ypsomed Innovations-
Center for Biomedical Engineering Research» der Universität Bern. fonds mit CAScination AG 2013, Gewinner Ypsomed Innovations-
Forschungsschwerpunkte: Orthopädische Biomechanik und preis des Ypsomed Innovationsfonds mit CAScination AG 2010.
bildgestützte Chirurgie verbunden mit einer ganzheitlichen
translationalen Strategie zur Entwicklung neuartiger klinischer
Behandlungsmethoden.
Kommerzielle Aktivitäten: Mitgründung der chirurgischen
Navigationsfirma Medivision AG, von Orthopaedic Services FNG
16 VSH-Bulletin Nr. 1, April 2019 | AEU-Bulletin no 1, avril 2019Sie können auch lesen

















































