KYBERNETIK UND DIE INTELLIGENZ VERTEILTER SYSTEME NORDRHEIN-WESTFALEN AUF DEM WEG ZUM DIGITALEN INDUSTRIELAND - CPS.HUB ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

KYBERNETIK UND DIE INTELLIGENZ VERTEILTER SYSTEME NORDRHEIN-WESTFALEN AUF DEM WEG ZUM DIGITALEN INDUSTRIELAND

IKT.NRW
SCHRIFTENREIHE
Die Studie "Kybernetik und die Intelligenz verteilter Systeme" erläutert die Entwicklung,
die Herausforderungen und die Potentiale der kybernetischen Idee für dezentrale
Steuerungsmodelle von Cyber Physical Systems und 4.0-Paradigmen.
Autorin
Univ.-Prof. Dr. rer. nat. Sabina Jeschke
Mit Dank an Dr. Alicia Dröge, Dr. Ruth Horn, Alexander an Haack, Erhard Zorn, Dr.-Ing.
Tobias Meisen, Dr.-Ing. Daniel Ewert, Dr. Frank Hees, Philipp Ennen, Prof. Christian
Brecher, Prof. Gerhard Lakemayer, Prof. Rolf Rossaint, Prof. Christopher Schlick.
Kontakt
Univ.-Prof. Dr. rer. nat. Sabina Jeschke
Direktorin des Institutsclusters IMA/ZLW & IfU
Prodekanin der Fakultät für Maschinenwesen
RWTH Aachen University
Dennewartstr. 27
62068 Aachen
sabina.jeschke@ieee.org
Hintergrund
Diese Studie ist Teil der IKT.NRW Schriftenreihe "NRW auf dem Weg zum digitalen
Industrieland". Die Beiträge der Schriftenreihe ergänzen die unter dem gleichnamigen
Titel erschienene IKT.NRW Roadmap 2020 – entweder aus der Perspektive einer IKT-
Basistechnologie oder einer der NRW-Schlüsselbranchen.
Herausgeber
Clustermanagement IKT.NRW
V. i. S. d. P. Monika Gatzke
c/o SiKoM – Institut für Systemforschung der Informations-,
Kommunikations- und Medientechnologie
Bergische Universität Wuppertal
Rainer-Gruenter-Str. 21
42119 Wuppertal
Wuppertal, Dezember 2014
2
INHALT
1. Hintergrund 4
2. Kybernetik 7
2.1 Ein historischer Exkurs 7
2.2 Die zentralen Elemente der Kybernetik 9
3. Begriffsklärungen im Feld der verteilten intelligenten Systeme 11
3.1 Verteilte Systeme 11
3.2 Internet of Things und Cyber Physical Systems 13
3.3 Künstliche Intelligenz: von „GOFAI“ zum Konnektivismus 14
3.4 Embodiment-Theorie 16
3.5 Der Intelligenzbegriff – eine pragmatische Annäherung 16
4. Auf dem Weg zu einer dezentralen Automatisierungstechnik 18
4.1 Zum Stand der Automatisierungstechnik heute 18
4.2 Automatisierungstechnik der Zukunft 19
4.3 Modellierungen dezentraler Systeme durch Multiagenten 22
4.4 Architekturen für dezentrale Steuerungen 25
4.4.1 Watsons probabilistische DeepQA Architektur 25
4.4.2 Logistik 4.0: Beispiel einer hybriden 3-Layer-Architektur 27
4.4.3 Kognitive Architekturen 29
4.5 Transparenz in Systemen dezentraler Steuerung 32
5. Perspektiven – Innovationspotentiale und Einsatzgebiete 36
5.1 Vernetzte Automatisierungstechnik in der Industrie 36
5.1.1 Losgrößen und individualisierte Fertigung 37
5.1.2 Die Revolution des Ramp-Up Prozesses 38
5.1.3 „Personalisierung“ der Smart Objects 39
5.1.4 Dezentrale Steuerungen in der Mensch-Maschine-Kooperation 41
5.1.5 Von Smart Factories und Fabrics of the Future 43
5.2 Vernetzte Automatisierungstechnik erobert den Alltag 44
5.2.1 Vehicle2infrastructure Communication 46
5.2.2 Smart Grid, Smart Buildings, Smart Metering 48
5.2.3 eHealth 50
5.2.4 Neue Mensch-Maschine-Schnittstellen 55
6. Zusammenfassung und Fazit 59
7. Literatur 65
3
1. HINTERGRUND
Zusammen mit einigen bemerkenswerten Durchbrüchen in den
vergangenen drei Jahren, wie dem Jeopardy-spielenden IBM-
Supercomputer Watson oder dem autonomen Google Car, stehen wir vor
einer neuen Ära in der Künstlichen Intelligenz. Eine besondere Rolle
nimmt dabei die „Verteilte Künstliche Intelligenz“ ein, Cyber Physical
Systems, Internet of Things und die 4.0-Metapher “boomen”.
Die Bedeutung dieser Konzepte geht in vielfacher Hinsicht weit über die
Entwicklung einer „normalen“ technischen Neuerung hinaus. Ein Aspekt
lässt dabei besonders aufhorchen: Hier entsteht eine neuartige Form
einer „Intelligenz“, einer nämlich, die auf der Vielzahl, der räumlichen
Verteiltheit und der Heterogenität ihrer Subkomponenten basiert – eine Abb. 1: 4.0 – Systeme verteilter Intelligenz
„Intelligenz verteilter Systeme“. Diese Intelligenz muss verstanden erobern das Feld;
Bild © OPC Foundation
werden – schon allein weil die hier entstehenden Systeme unmittelbare
und umfassende Auswirkungen auf unseren Alltag haben und in der
Zukunft noch viel mehr haben werden, wie an Beispielen wie smart grids in der
Energietechnik, kooperativen Robotern in der Produktionstechnik, vernetzten
medizinischen Systemen zur Früherkennung, oder der car2Infrastructur Communication
im Verkehr sofort erkennbar wird.
Ist nun das Konzept einer „verteilten Intelligenz“ tatsächlich neu? Schließlich ist auch bei
Menschen, ebenso bei anderen Säugetieren, der „Sitz“ der Intelligenz nicht ausschließlich
das Gehirn selbst: Intelligente Vorverarbeitungen finden in „biologischen Sensoren“, den
4
Sinnesorganen, statt. Entsprechendes gilt für „biologische Aktuatoren“, Muskeln, die
durch zuständige Bereiche im Rückenmark gesteuert werden. Erst diese
Vorverarbeitungen ermöglichen hochqualifizierte und vor allem „echtzeitfähige“
Reaktionen: Ohne sie wären wir nicht einmal in der Lage, eine Fliege zu erlegen, gar nicht
zu reden von einer Flucht vor einem Säbelzahntiger! Auch hier ist die Intelligenz also zu
einem gewissen Grade – wenn auch in anderer Weise – verteilt. Als Tendenz zeichnet sich
in der Tierwelt ab, dass hochentwickelte Formen von Intelligenz gerade mit einer höheren
Verteiltheit ihrer „intelligenz-erzeugenden Komponenten“ einhergehen. Die Vermutung
liegt daher nahe, dass – wenngleich nicht ausnahmslos – zunehmende Verteiltheit nicht
nur zu Intelligenz beiträgt, sondern möglicherweise sogar eine Voraussetzung einer
hochentwickelten Intelligenz sein könnte.
Tatsächlich ist nicht die Verteiltheit an sich „das Neuartige“ im „Zoo der Systeme“. Das
Neue liegt zum einen in der Art der Verteilung, also darin, dass Systeme wie Cyber Physical
Systems (kurz: CPS) weder in einem strikten noch in einem schwachen
Sinn „lokalisiert“ sind. Während ein Mensch, ein Tier, ein einzelner
Roboter oder ein isolierter Computer in erster Näherung als eine
„lokalisierte Entität“ angenommen werden können, mit „kleiner“
Ausdehnung und einem entsprechend beschränkten Wahrnehmungs-
und Wirkungsradius also, ist ein Cyber Physical System räumlich nicht
beschränkt, sondern kann aus Komponenten bestehen, die sich im
Extremfall über die gesamte Welt verteilen. Ein solches System kann
Informationen von weit entfernten Orten – bis auf physikalisch bedingte
Signalübertragungzeiten – synchron zusammenführen, und ebenso an all
diesen Orten mit seinen global agierenden Entitäten gleichzeitig fast
synchron mit der Umwelt interagieren. Abb. 2: Verteilung der intelligenz
bei Menschen auf Gehirn, Sinnesorgane und
Die zweite wesentliche Neuerung betrifft Gestalt und Wandelbarkeit
Aktuatoren; Bild © M. Malcher Aachen
solcher Systeme: Während Mensch und Tier i.d.R. aus einer festen
Anzahl von Komponenten, etwa Gliedmaßen, Sinnesorganen etc., bestehen, induziert die
Perspektive des Internet of Things Konstrukte hochgradiger Dynamik und Variabilität: Ihre
mit einer Teilautonomie ausgestatteten Komponenten bilden eine Art „Community“,
deren Mitglieder „kommen und gehen“ wie sie wollen bzw. wie es die Gegebenheiten
erlauben. Eine Art zentrale „Zugangs- und Anwesenheitskontrolle“ kann zwar technisch
realisiert werden, ist aber nicht unmittelbarer Bestandteil des Konzepts. Vorgesehen ist
hier zunächst nur eine zentrale Kenntnis über die Mitgliederstruktur zu jedem festen
Zeitpunkt, eine Art „Anwesenheitsprotokoll“. Darüber hinaus können einzelne
Komponenten gleichzeitig zu mehreren, also verschiedenen Cyber Physical Systems
gehören! – Intelligente Cyber Physical Systems haben damit Fähigkeiten der
„Eigengestaltung“ und darauf basierender Optimierung in einem bis dato in der Technik
unbekannten Maße.
Nach der Embodiment-Theorie entsteht Intelligenz aus dem Wechselspiel zwischen dem
Körper und seiner Umwelt. Nicht nur setzt damit die Ausbildung von Intelligenz die
grundsätzliche Existenz eines Körpers voraus, – die Robotik hat durch die Embodiment-
Theorie innerhalb der KI einen enormen Schub erfahren – mehr noch: Die Ausbildung der
5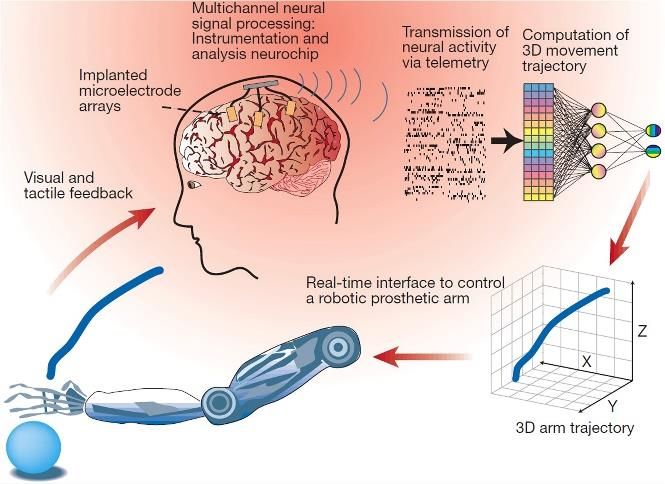
Intelligenz hängt von der konkreten Gestalt eines Körpers ab, weil unterschiedlich
gestaltete Körper unterschiedliche physikalische Interaktion erfahren. Wenn die
Embodiment-Theorie sich als zutreffend erweist – und dafür spricht vieles: Was für ein
Intelligenzbegriff entsteht dann bei einem „Wesen“ mit praktisch unbegrenzter
Reichweite und dynamischem Austausch seiner Komponenten? Was bedeutet der
Intelligenz-Begriff in einem Cyber Physical System, und was für Anwendungen sind auf
dieser Basis möglich?
Die vorliegende Studie ordnet sich bewusst zwischen zwei Polen ein: Der vordere Teil ist
dominiert durch eine Einführung in die kybernetische Denkweise und die Grundlagen von
Theorie und Praxis verteilter intelligenter Systeme. Das Verständnis dieser Konzepte und
Modelle stellt eine zentrale Hilfe für die anstehende
Weiterentwicklungen im Kontext einer Industrie 4.0 dar. Der
weitere Teil ist eher in das Modell zukunftsorientierter Studien
einzuordnen, die Perspektiven auf Handlungsoptionen eröffnen.
Als Zielgruppe steht hier die Deutsche Wirtschaft und ganz
besonders der Kompetenzraum NRW im Vordergrund.
Abb. 3: Körper eines 4.0-„Wesens“?
Bild © M. Malcher Aachen
6
2. KYBERNETIK
2.1 Ein historischer Exkurs
Der Begriff „Kybernetik“ leitet sich ab vom altgr. Wort kybernétes (etwa: steuermännisch,
Steuermannskunst) und wurde um 1940 begründet. Als Vater der Disziplin gilt der
bekannte amerikanische Mathematiker Norbert Wiener, der Lehrstühle zunächst am
MIT Boston/USA und später in Cambridge/UK innehatte. 1948 erschien sein
berühmtes Buch “Cybernetics or Control and Communication in the Animal and the
Machine” (deutsche Ausgabe: Kybernetik. Regelung und Nachrichtenübertragung im
Lebewesen und in der Maschine) [1], ein Titel der gleichsam als eine erste Definition
dieses neuen Konzeptes verstanden werden kann. Im gleichen Jahr erschien in der
Zeitschrift Scientific American ein grundlegender Übersichtsartikel zur Kybernetik [2].
Die Macy-Konferenzen „Circular causal, and feedback mechanisms in biological and
social systems“ (1946-1953, [2]) wirkten bei der Weiterentwicklung des Konzepts als
interdisziplinärer Katalysator.
Die Kybernetik erforscht die grundlegenden Konzepte zur Steuerung und Regelung
Abb. 4: Norbert Wiener, Vater
komplexer, hybrider Systeme. Es ist für den Leser entscheidend, dieses Konzept vor
der Kybernetik;
ihrem historischen Hintergrund zu reflektieren, um die Parallelen für die heutigen © laroucheplanet.info
Entwicklungen zu verstehen: Eingeleitet durch die zweite industrielle Revolution zur
Jahrhundertwende erlebte die Automatisierungstechnik in den Dreißiger- und
Vierzigerjahren des 20. Jahrhunderts eine stürmische Entwicklung. Auf der Theorieseite
lag die Wurzel des Erfolgs in dem umfassenden Leistungszuwachs der Steuer- und
7
Regelungstechnik, die sich seit den 1920er Jahren rasant entwickelte. Die Leistung von
Wiener und Kollegen war damit weniger, sich mit der Steuerung und Regelung von
Systemen zu befassen – denn das lag auf der Hand. Die neue Idee der jungen Disziplin war
vielmehr, dass hier keinerlei Voraussetzung an die Art der Systeme gemacht wurden, die
da geregelt werden sollten – dass es sich um Maschinen, Systeme von Maschinen, aber
auch um Menschen, Organisationen, biologische Systeme, ökologische Systeme oder
Mischformen der genannten handeln konnte. Die Kybernetik war der erste Versuch, die
Erkenntnisgewinne der klassischen Steuer- und Regelungstechnik auf beliebige,
heterogene sowie „nicht-nur“ technische Systeme zu übertragen.
Damit waren die Ziele der Kybernetik zweierlei: Gesucht wurde zum einen eine
ganzheitliche, auf Steuerungs- und Regelungsmechanismen basierende Beschreibung
solcher komplexen Gesamtsysteme, mit qualitativen und quantitativen Komponenten.
Zum zweiten sollte diese Theorie die Basis einer disziplinübergreifenden neuen
„Einheitswissenschaft“ bilden, d.h. sehr unterschiedliche Bereiche mit einer einzigen
Theorie beschreiben können, und damit in der Konsequenz auch Systeme völlig
unterschiedlicher Herkunft in ihrem Verhalten vergleichbar machen.
Der neue Ansatz wurde schnell von Wissenschaftlern sehr unterschiedlicher Disziplinen
aufgegriffen, konzeptionell erweitert und auf verschiedenste neue Anwendungsfelder
übertragen. Insbesondere die berühmten
„Macy-Konferenzen“ (1946-1953, USA) trugen
umfassend zur Vernetzung der führenden
Köpfe verschiedener Disziplinen bei [2].
Die Kybernetik durchlief eine wechselvolle
Geschichte, von vielen „Aufs und Abs“
getrieben [3]: Zwar ließ die grundsätzliche Idee
kaum Raum für Zweifel. Das Statement von
Wolfgang Wieser 1963, zum 15. Jahrestag des
Erscheinens von Norbert Wieners Cybernetics
fängt die „Hype Stimmung“ perfekt ein: Abb. 5: Macy-Konferenzen,
„Kybernetik ist zu mehr als einem zentraler Treiber einer multidisziplinären Kybernetik
wissenschaftlichen oder technologischen
Begriff geworden: Sie ist eine Idee, ein Programm, ein Schlagwort – einer jener
Kondensationspunkte im intellektuellen Raum, an dem sich der gestaltlose Nebel von
Einzelwissen und Spekulation hoffnungsvoll niederschlägt.“ [4]
Die konkreten Ergebnisse jedoch konnten nicht mit den Erwartungen Schritt halten.
Insbesondere wurde die fehlende Quantifizierbarkeit der Modelle zu einem zentralen
Punkt der Wissenschaftskritik – eine Theorie, die über rein qualitative Aussagen nicht
hinauskommt, erfüllt nicht die Anforderungen einer naturwissenschaftlich dominierten
Weltsicht. Moderne Weiterentwicklungen etwa aus Teilen der System Dynamics-
Community [5], begründet von Jay W. Forrester [6] bereits in der Mitte der 1950er Jahre
an der Sloan School des MIT, setzten genau hier an, um die Theorie voranzutreiben.
8
Eine andere Kritik, der die Kybernetik stets ausgesetzt war, kommt aus den Geistes- und
Gesellschaftswissenschaften: Die Kybernetik fasst Menschen und Gesellschaften als
komplexe Mechanismen auf, die sich – ganz im Sinne einer Einheitstheorie – in ihrer
grundsätzlichen Modellierung nicht von Maschinen- oder Maschinensystemen
unterscheiden. „Nur wenn Menschen und Maschinen gleichermaßen auf digitaler Basis
arbeiten, wenn das Wissen vom Menschen und das Wissen von Computern kompatibel
gemacht werden können, ist auch die kybernetische Epistemologie selbst arbeitsfähig.“
schreibt dazu der Medientheoretiker Claus Pias [7]. Damit war die Kybernetik stets dem
Vorwurf der „Mechanisierung des Menschlichen“ ausgesetzt (ein paralleler Vorwurf traf
zeitgleich den Taylorismus). Die Kritiker legen einen grundsätzlichen Unterschied
zwischen den Menschen auf der einen Seite und Technik auf der anderen zu Grunde, der
Mensch als das kreative, bewusste und intelligente auffasst, dagegen die Maschine als
einfältig und bestenfalls in der Lage, standardisierte Prozeduren abzuarbeiten. Gerade mit
den extremen Leistungssteigerungen der künstlichen Intelligenz in den letzten zwei
Jahrzehnten wird jedoch deutlich, dass dieser Ansatz – jedenfalls in einer strikten Form –
eher von einem gewissen Bias als von der Realität getrieben ist.
Die Kybernetik gehört zu den Gründungsdisziplinen der modernen Informatik. Sie ist als
„Großvater“ des wichtigen Teilgebiets der KI, der künstlichen Intelligenz, zu betrachten,
und sie wird vielfach mit biologischen Konzepten wie der Schwarmintelligenz, der
Fähigkeit zur Selbstorganisation, der Autopoesis und der Bionik als Gebiet in Verbindung
gebracht. Auch Begriffe wie der Cyber Space, der Cyborg aus dem Science Fiction Genre
oder eben auch die Cyber Physical Systems tragen – nicht nur sprachlich – das Erbe der
Kybernetik in sich [3].
2.2 Die zentralen Elemente der Kybernetik
Die Kybernetik ist eine sogenannte Systemtheorie, sie ist sogar der prominenteste
Vertreter dieser Klasse von Erkenntnismodellen. Der Name ist Programm: Systemtheorien
versuchen, die Gesetzmäßigkeiten komplexer Systeme zu analysieren, zu modellieren und
damit das Systemverhalten grundsätzlich transparent und vorhersagbar zu machen. Ein
System ist dabei zusammengesetzt aus mehreren (bis hin zu sehr vielen) Subsystemen
oder Einzelelementen, die als Ganzes zusammenwirken, wodurch ein
Gesamtsystemverhalten entsteht. Systemtheorien brechen mit der Betrachtung isolierter
Objekte und stellen stattdessen die Betrachtung der Relationen zwischen Objekten
und/oder Subsystemen und ihre gegenseitigen Beeinflussungen in den Vordergrund.
Die Grundkonzeption der Kybernetik sind von einigen zentralen Elementen
gekennzeichnet:
Komplexe Systeme: Die Kybernetik betrachtet Viel-Komponenten-Systeme als
ihren Untersuchungsgegenstand. Diese Komponenten stehen i.d.R. in komplexen,
nicht-linearen Wechselwirkungen, und sie können heterogenen Ursprungs sein.
Die Kybernetik macht keine Einschränkung an die „Art“ der beteiligten
Komponenten.
9
Feedbackschleife [auch „Rückkopplungsschleife“]: Rückkoppelung beschreibt
einen wichtigen Mechanismus der Regelungstechnik, bei dem das „Ergebnis“,
also das Outputsignal, an die Eingangsgröße zurückgemeldet wird und dort
modulierend (verstärkend oder abschwächend) rückwirken kann. An die Stelle
geradlinig-kausaler Erklärungen treten damit zirkuläre Erklärungsansätze, die
nicht auf einen umfassenden Forecast des Systemverhaltens zielen, sondern die
Grundsätze des Systemverhaltens abbilden. Rückkopplungsschleifen mit
Selbstregulationseigenschaften sind das kennzeichnende Merkmal der
Funktionsweise natürlicher Systeme. Kybernetische Systeme werden durch
multiple Feedbackschleifen beschrieben.
Autopoiesis (altgriech., autos „selbst“, poiein „machen“): Autopoietische Sys-
teme haben die Fähigkeit zu selbstständiger Reproduktion. Autopoietische Sys-
teme sind in diesem Sinne „lebendig“, dabei aber nicht notwendigerweise biolo-
gischer Natur. Stabile, langlebige Systeme sind durch Autopoiesis gekennzeich-
net, die neue Fähigkeiten ausbilden kann, um sich geänderten Bedingungen
anzupassen. Der Begriff wurde durch die Biologen Humberto Maturana und Fran-
cisco Varela geformt.
Dezentralität: Kybernetische Systeme sind durch eine
weitgehend dezentrale Steuerung gekennzeichnet, die sich als
natürliche Konsequenz des rückkopplungsgetriebenen Ansatzes
ergibt. Die Folge ist ein weitgehend bottom-up induziertes
Systemverhalten. Die Kybernetik postuliert damit eine
prinzipielle Überlegenheit selbstorganisierter Prozesse (bottom-
up) über zentralistischen top-down Prozessen.
Emergenz (lat., emergere, etwa: auftauchen, entstehen):
Kybernetische Systeme zeigen emergentes Verhalten, d.h. es
kommt zu einer spontanen Herausbildung neuer Eigenschaften,
Strukturen oder Verhaltensweisen eines Systems infolge des
dezentralen Zusammenspiels seiner Komponenten, die die Abb. 6: Das Viable Systems Model nach
Stafford Beer 1995; Bild © M. Malcher Aachen
einzelnen Systemelemente nicht aufweisen. So kann etwa ein
Schwarmverhalten von Fischen nur entstehen, wenn hinreichend
viele Fische vorhanden sind – ein einzelner Fisch kann keinen Schwarm bilden.
Emergenzeffektre sind i.d.R. „positiv“ für das betrachtetet System – zwar ist im
Grundsatz auch negative Emergenzbildung möglich, das führt allerdings häufig
zum Ableben des Systems und somit zum Verschwinden des Effekts und wird
deshalb weniger beobachtet. – Emergenzbildung ist somit eine zentrale
Grundlage für das Überleben „höherwertiger“, also besser angepasster Systeme
an ihre Umgebung: Schwarmbildung bietet erhöhten Schutz vor Räubern, das
„neue Verhalten“ führt also zu einer höheren Lösungsqualität als die Verfolgung
reiner Einzelstrategien.
103. BEGRIFFSKLÄRUNGEN IM FELD DER
VERTEILTEN INTELLIGENTEN SYSTEME
3.1 Verteilte Systeme
Unter einem verteilten System wird in der Informatik – basierend auf der Definition von
A. Tanenbaum [8] [9] – ein Zusammenschluss unabhängiger Computersysteme
verstanden. Nach außen repräsentieren sich diese als ein einziges System. Die beteiligten
Computersysteme können unterschiedlich repräsentiert sein: Es kann sich dabei einfach
nur um Prozessoren, um Blades in einem Rechenzentrum, um PCs oder Labtops, mobile
Systeme oder eingebettete Prozessoren handeln, um nur die
wesentlichen Klassen zu nennen. Zentrale Eigenschaft eines verteilten
Systems ist, dass es sich um autonome unabhängige Einheiten handelt,
die über keinen gemeinsamen Speicher verfügen – was im Umkehrschluss
bedeutet, dass jede Form des Datenaustauschs durch
Kommunikationsprozesse zwischen den beteiligten Einheiten realisiert
werden muss. Während in der Vergangenheit mehrheitlich verteilte
Computerzusammenschlüsse betrachtet wurden, etwa in
Rechenzentren, gewinnen in der jüngeren Zeit insbesondere diejenigen
verteilten Systeme an Bedeutung, die „embodied“ sind und aktiv mit ihrer Abb. 7: ein an Industrie 4.0 angelehntes
verteiltes System;
Umwelt interagieren, wie etwa ein Team kooperierender Roboter oder
Bild © M. Malcher Aachen
ein Schwarm autonomer Fahrzeuge.
11Betrachtet man die Entwicklung der künstlichen Intelligenz in den letzten zwei Dekaden,
so wird der Einfluss des Paradigmas der „Verteilung“ in allen Bereichen überdeutlich:
Verteilte Systeme sind die treibende Kraft hinter heutigen Hochleistungsrechnern:
In den siebziger Jahren banden die ersten local-area networks wie das Ethernet Computer
zu ersten Clustern zusammen. Auf dieser Basis konnte eine vorher undenkbare
Rechenleistung erreicht werden, und das auf der Basis “üblicher” Geräte anstelle
monolithischer, teurer Großrechner mit „Einzelstückcharakter“. Schon bald stellten diese
Cluster die monolithischen Großrechner, die „Mainframes“, beim „number crunching“ in
den Schatten. Die Verteiltheit der Systeme führte zwangsläufig zu einem Schub in dem
Forschungsfeld der Parallelisierung von Algorithmen, um die entstehende Rechnerpower
überhaupt nutzen zu können.
Neuronale Netze zeigen ihr Potential:
Neuronale Netze sind grob dem Aufbau des Gehirns nachempfunden. Künstliche
Neuronen werden untereinander verknüft – ein verteiltes System also wiederum – und
sind in der Lage, nach der sogenannten Hebb’schen Lernregel [10] [11] zu lernen. Im
Gegensatz zur sequenziellen Abarbeitung klassischer
Programme verarbeitet ein neuronales Netz alle
eingehenden Inputs parallel und ist damit ungleich schneller,
auch skaliert es besser weil im Fall komplexerer Strukturen
einfach die Anzahl der beteiligten Neuronen erhöht wird,
anstatt den Algorithmus anpassen zu müssen. Etwa im
Bereich automatischer Mustererkennung – eine zentrale
Fähigkeit aller intelligenten Systeme – haben sie inzwischen Abb. 8: Neuronale Netze – inspiriert vom
beeindruckende Ergebnisse. Die Theorie neuronaler Netze biologischen Vorbild; Bild © M. Malcher Aachen
entstand bereits in den Vierzigerjahren, allerdings reichten
lange Zeit die Rechnerleistungen nicht aus, um die
Leistungsfähigkeit des Ansatzes zu beweisen. Neuronale Netze markieren den radikalen
Wechsel von der symbolischen zur subsymbolischen KI, der vielleicht wichtigste
Paradigmenwechsel der KI überhaupt (vergl. Kap. 3.4). Heute erleben neuronale Netze in
Form der Deep-Learning-Algorithmen (siehe Kap. 4.4), Kernelement der Big Data
Techniken, eine Blüte.
Das Internet ist die dominierende Kulturtechnik:
Das Internet ist die dominierende Kulturtechnik und gleichzeitig das größte verteilte
System, das die Menschheit jemals gestaltet hat. Mit seinen riesigen und heterogenen
Datenmengen, verteilt auf unzählige Server, repräsentiert das Internet einen völlig neuen
Typ eines komplexen Systems mit (teil-)autonomen Subsystemen. Hochskalierbare, weil
parallelisierte, Algorithmen wie z.B. Googles MapReduce [12] [13] führen zu
bemerkenswerten Ergebnissen. Die gesamte „Big Data“ Entwicklung ist – als Offspring der
Internettechnologie – aktuell dabei, Wissenschaftsmethodiken ebenso wie ganze
Wirtschaftszweige umzukrempeln.
12Mit dem Konzept der Cyber Physical Systems entsteht ein neuer Typ verteilter Systeme:
Dieser Typ ist charakterisiert durch die Interaktion von Teilen seiner Komponenten
(Sensoren, Roboter usw.) mit der Umgebung (vergl. Kap. 1). CPS können als die
Weiterentwicklung eingebetteter Systeme [14] [15] verstanden werden, jedoch mit
erweiterten Funktionalitäten in Bezug auf Kommunikation und Kooperation. Sie bilden
eine Brücke zwischen der digitalen Computerwelt und der physikalischen Umwelt. Weil
das System über physische Erfahrungen und – jedenfalls in gewisser Weise – über einen
Körper verfügt, erfüllt es die zentralen Voraussetzungen für die Ausbildung von Intelligenz
nach der Embodiment-Theorie (vergl. Kap. 3.4).
Diese Liste ließe sich fortsetzen, insbesondere verdichten. Summarisch ergibt sich die
Erkenntnis, dass verteilte Computersysteme und verteilte Algorithmen aktuell zu einem
neuen Typ intelligenter Systeme führen, dessen primäre “Verhaltensmuster” durch einen
bottom-up Ansatz – dem Verhalten der Einzelkomponenten – und damit kybernetisch
geprägt sind. Und wenn auch von einem strikten Standpunkt aus die Entwicklung eine
kontinuierliche, und damit eine rein quantitative, ist – unsere Wahrnehmung ist doch
mehrheitlich eine andere: Weil diese neuen Strukturen völlig neue Szenarien
ermöglichen, wie z.B. autonome kooperierende Fahrzeuge, intelligente Energienetze, und
vieles mehr, ist die Veränderung in ihrer Konsequenz durchaus eine sprunghafte, und in
der Folge sowohl quantitative als auch qualitative.
3.2 Internet of Things und Cyber Physical Systems
Der Begriff des „Internet of Things” (kurz: IoT) entstand 1999 durch Kevin Ashton (Auto-
ID Center des MIT, USA), der Begriff der „Cyber Physical Systems“ wurde 2006 durch Helen
Gill von den National Science Foundation NSF (der „amerikanischen DFG“) maßgeblich
geprägt. Im Kern handelt es sich bei ersterem um einen Verbund mehrheitlich technischer
Subkomponenten, die über eine internetbasierte Dateninfrastruktur miteinander
kommunizieren, bei letzterem um die Ausweitung des „Beteiligungskonzepts“ des
Internets: Teilnehmer sind nicht mehr ausschließlich Menschen, sondern auch „Dinge“ –
wie etwa die Sensorik eines Autos, Klimadatenstationen, Prozessdatenrechner der
Produktionstechnik und andere informationstragende und/oder mit der Umwelt
unmittelbar interagierende Systeme.
In beiden Konzepten entsteht ein „Graph“ aus Knoten und Kanten, ein verteiltes System
– bei dem die Knoten die Informationseinheiten repräsentieren, die Kanten die
Kommunikationswege. Die eine Sichtweise fokussiert auf die Komponenten, die zweite
auf das Netzwerk – in gegenseitiger vollständiger Anerkennung dessen, dass das eine
ohne das andere wenig nützlich wäre. Im Ergebnis bilden Cyber Physical Systems und
Internet of Things zwei Sichten auf dasselbe Phänomen, nämlich, wie es einer der
führenden Wissenschaftler von Bosch, Dr. Stefan Ferber, in seiner Keynote 2012 in
Wuxi/China zusammenfasste, „… the outlook of connecting 50 billions devices by 2015“.
„Connecting them with each other and with 6 billion people“, hätte er noch hinzufügen
können.
13Interessant ist die unterschiedliche Konzeptualierung der Begriffe bei gleichzeitiger
Übereinstimmung ihrer Kernelemente: Beide Ansätze gehen von einem großen, verteilten
System von (Sub-)Systemen aus, die mit der Umgebung gekoppelt sind und mit dieser
Informationen austauschen. Das Internet fungiert als Informationsträger und
Protokolleebene, die Komponenten sind als eingebettete Systeme („embedded systems“)
realiziert. Die Perspektive des Internet of Things ist aus der Informatik getrieben, i.w. als
Erweiterung derjenigen Community die auch das Internet entworfen hat;
konsequenterweise steht hier die Netz- und Kommunikationsperspektive im
Vordergrund. Der Begriff des „Cyber-physical Systems” wurde von Beginn an stark
getrieben durch die Ingenieurwissenschaften - die Perspektive auf die
Einzelkomponenten, die dann miteinander kommunizieren, ist unverkennbar. Dieser
Unterschied in der Betrachtung wird gut sichtbar in den unterschiedlichen
Lösungsmethodiken beider Gruppen.
3.3 Künstliche Intelligenz: von „GOFAI“ zum
Konnektivismus
Die Geschichte der Künstlichen Intelligenz beginnt in den Fünfzigerjahren in der Bugwelle
immer leistungsstärkerer Rechner. Die Informatik begründet sich als eigenständiges
Fachgebiet (sie wurde zuvor innerhalb der Mathematik bzw. der Elektrotechnik oder
zwischen beiden Disziplinen angesiedelt), erste Studiengänge zur KI entstehen.
Zentrale Namen sind John McCarthy [16], Marvin Minsky [17], Claude Shannon [18],
Alan Turing [19], Hans Moravec [20]. Die Community überlappte sich erheblich mit
der der Kybernetik.
Die KI ist getrieben von zwei – einander i.w. ablösenden – zentralen Stömungen, die
verkürzt mit „top-down“ vs. „bottom-up“ KI beschrieben werden können:
„GOFAI“ – „top-down“ – symbolische KI:
o In der frühen Phase der KI wurde angenommen, dass die Explizierung von
Informationen die zentrale Grundlage für Intelligenz sei (die sog. „Physical
Symbol System Hypothesis“). Das Ergebnis waren alle erdenkbaren Formen
von Wissensrepräsentationen, also riesige Datenbanken als Wissensspeicher,
detaillierte Taskbeschreibungen usw. – der Versuch, das menschliche Wissen
inkl. Handlungsbeschreibungen so komplett wie möglich abzubilden.
Abb. 9: GOFAI – Nürnberger
o Man spricht von der „symbolischen KI”, weil sie als Startpunkt das Wissen als
Trichter für IT-Systeme;
Symbole in den Speichersystemen des Computers anordnet, um dann auf Bild © M. Malcher Aachen
diesen zu operieren. Der Ansatz wird heute, also retrospektiv und mit
leichtem Augenzwinkern, als GOFAI – „good old-fashioned artificial intelligence“
– bezeichnet.
Nachdem diese Programme zwar Achtungserfolge in sehr spezialisierten Anwendungen
erreichen konnten, den großen Zielen eines wirklich intelligenten Agierens auch in
unbekannten Handlungskonzepten aber kaum näher kamen, setzte ein umfangreiches
Umdenken ein:
14Konnektivismus – „bottom-up“ – subsymbolische KI:
Wissen sollte selbstständig und durch Erfahrungen erworben werden
können. Voraussetzung dafür ist klarerweise die Fähigkeit, überhaupt
Informationen aus der Umwelt wahrnehmen zu können, weshalb dieser
Ansatz in natürlicher Weise die im Kap. 3.4 eingeführte Embodiment-
Theorie einleitete. Das wesentliche Werkzeug der Methode sind die in Kap.
3.1 eingeführten neuronalen Netze, die – vereinfacht – die Funktionsweise
des menschlichen Gehirns nachahmen und ein wichtiges Konzept verteilter
Systeme darstellen.
Die Subsumption-Architektur [21] [22], eingeführt durch Rodney Brooks
1986 (vergl. Kap. 3.4), wurde zur wichtigsten Architektur in der
Robotikforschung, in der Informatik lösten hybride kognitive Architekturen Abb. 10: Konnectivismus –
subsymbolische KI;
wie Soar die zuvor rein symbolischen ab (vergl. Kap. 4.4.3).
Bild © M. Malcher Aachen
In Abgrenzung zur symbolischen KI und wegen ihres „von unten
kommenden“ Ansatzes wird dieser Ansatz als „subsymbolische KI“ bezeichnet.
Das folgende Beispiel [22] illustriert den Unterschied perfekt: um etwa den Buchstaben
W zu erkennen und von anderen Buchstaben unterscheiden zu können, würde ein top-
down Programm ein Testobjekt mit einer genauen Beschreibung des Buchstaben („vier
Linien, die paarweise an ihren Ecken mit den-und-den Winkeln miteinander verbunden
sind“) abgleichen. Ein bottom-up Programm hingegen würde anhand verschiedener Ws
deren Gemeinsamkeiten erlernen und das gelernte dann auf weitere Kandidaten
anwenden. Im Hintergrund steckt i.d.R. ein neuronales Netz, das auf den Buchstaben
trainiert wurde (vergl. Kap. 3.1). Im Kern steht einfach der Unterschied zwischen „Wissen
mitgeben“ vs. „Wissen erwerben“.
Das Beispiel macht auch deutlich dass der „Schulstreit“ der beiden Fraktionen an
manchen Stellen überzogen ist: Auch ein System, das erfahrungsgetrieben lernt, baut ja
eine Wissensbasis auf, auf der es dann operiert. In diesem Sinn schliessen sich
symbolische und subsymbolische KI nicht aus, die Herkunft des Wissens ist allerdings
unterschiedlich. Moderne Ansätze aus den Kognitionswissenschaften wie etwa D.
Kahnemann (Nobelpreis 2003, „Schnelles Denken langsames Denken“, [23] [24]) legen
vielmehr nahe, dass die optimale Struktur gerade in einer geschickten Kombination beider
Ansätze liegt. Genau dieser Ansatz wird auch in hybriden Softwarearchitekturen heute
aufgegriffen (vergl. Kap. 4.4.2).
Die Kybernetik boomt derzeit. Das Kapitel erklärt die Ursache: Die Kybernetik ist ohnehin
ein „Großvater“ der KI, denn ihr Ziel war die Beschreibung des Verhaltens komplexer
Systeme ohne weitere Aussage über die Herkunft der Systeme, was also
Computersysteme mitumfasst. Weil aber aktuell die gesamte Entwicklung in Richtung
einer verteilten dezentralen, koennektivistischen KI zeigt, wächst der – ohnehin
vorhandene – Einfluss der Kybernetik auf die modernen Entwicklungen der Informatik
gerade massiv: Der dezentrale Modellierungsansatz des Konnektivismus entspricht genau
dem Steuerungsparadigma der Kybernetik, das dezentral organiserte Internet als
Schlüsseltechnologie des Digitalisierungszeitalters ebenso.
153.4 Embodiment-Theorie
Die Embodiment-Theorie entstammt den Kognitionswissenschaften und wurde von Rod-
ney Brooks [24] [25] [26] um 1980 in das Gebiet der künstlichen Intelligenz eingebracht
und seitdem intensiv weiterentwickelt, unter anderem durch Hans Moravec („Moravec
Paradoxon“, [20]) und im deutschsprachigen Raum insbesondere durch Rolf Pfeiffer an
der ETH Zürich [27]. Die zentrale Aussage ist, dass die eigenständige Ausbildung von Intel-
ligenz zwingend die Existenz eines Körpers voraussetzt, der mit der Umwelt interagiert
und so erfahrungsgetrieben Erkenntnisse gewinnen kann. Intelligenz ist demnach
Ausdruck einer sensomotorische Koordination, soll heißen: Sensoren (Sinnesorgane)
und Aktuatoren (Motoren, Muskeln) werden durch interne Informationsverarbei-
tung koordiniert. Der Ansatz steht in diametralem Gegensatz zu klassischen Interpre-
tationen, die Intelligenz als einen Spezialfall einer rein internen Informationsverar-
beitung verstanden.
Eindrucksvolle jüngere Arbeiten kamen insbesondere von Josh Bongard 2006 [28],
der als erster die Lernfähigkeit von Robotern auf der Basis selbsterlernter
Körpermodelle demonstrierte [28]. Im Kern geht es darum, Roboter mit einem Kör- Abb. 11: Embodiment – keine
perbewusstsein auszustatten, um ihn auf dieser Basis Bewegungen erlernen und op- Intelligenz ohne Körper;
timieren zu lassen. Der Bongard‘sche vierbeinige Spinnenroboter lernt auf diese Bild © M. Malcher Aachen
Weise zu laufen, und er erlernt einen Laufstil auf drei Beinen selbstständig wenn ein
Teil eines seiner Beine unbenutzbar ist.
Die Embodiment-Theorie kann als eine konsequente Interpretation oder Weiterführung
der Subsumption-Theorie (vergl. S. 15) gesehen werden: Die Existenz eines Körpers und
damit die Existenz von Sinnesorganen bzw. Sensoren ermöglicht genau die eigenständige
Erfahrung, die die Grundlage des Konnektivismus bildet.
3.5 Der Intelligenzbegriff – eine pragmatische
Annäherung
In den vorangegangenen Abschnitten wurde der Begriff der Intelligenz verwendet, ohne
die zugrundegelegte Definition zu thematisieren. Die zugehörige Debatte ist spannend
und soll in diesem Kapitel wenigstens ansatzweise vorgestellt werden – auch, um in den
nachfolgenden Kapiteln wenn nicht über eine Definition so doch über eine gewisse
definitorische Grundlage zu verfügen:
Die Konzeption dessen was Intelligenz ist – oder was sie nicht ist – füllt Bücher. Extreme
liegen zwischen dem sogenannten „Biological chauvinism” (verkürzt: „nur biologische
Gehirne sind intelligent“, angelehnt an C. Sagan in den sechziger Jahren) und dem „Liberal
functionalism” (verkürzt: „jedes verhaltensfähige System ist intelligent“; Jackendorf 1987,
Putnam 1967). Leicht überzeichnet ergibt sich eine Spanne von „nur Menschen sind
intelligent“ bis hin zu „auch ein Toaster ist schlau“. Während das erste Extrem
verhältnismäßig schnell zu den Akten gelegt werden kann, hat der zweite Ansatz
intellektuell einen gewissen Charme, weil er immerhin keine „willkürlichen Grenzen“
zieht. Jedoch: In einem Verständnis, dass „fast alles“ intelligent ist, lassen sich wiederum
16kaum Schlussfolgerungen über Entstehung und Funktionsweise hochentwickelter
Intelligenz gewinnen.
Im Großen und Ganzen besteht heute durchaus eine gewisse Übereinstimmung in der
wissenschaftlichen Community, auch über die unterschiedlichen Fachdisziplinen und
Schulen hinweg, darüber, dass ein „intelligenter Agent“ typischerweise durch drei
zentrale Komponenten gekennzeichnet ist:
1. die Fähigkeit zur Wahrnehmung der Umgebung und ihrer Veränderungen, also
der Besitz sensorischer Komponenten zur Wahrnehmung externer Stimuli –
SENSORIK
2. die Fähigkeit zur Prozessverarbeitung, also das Prozessieren der externen Daten,
deren Analyse und schließlich die Anpassung des eigenen Verhaltens an die
Umwelt – KOGNITION
3. die Fähigkeit zur Reaktion, also die Möglichkeit zur unmittelbaren physikalischen
Interaktion mit der Umgebung – AKTUATORIK.
In einem so verhältnismäßig allgemeingehaltenen Ansatz der Intelligenz als einem
„Dreisprung“ im oben skizzierten Sinne haben etwa heutige Industrieroboter durchaus
eine gewisse Intelligenz (vergl. Kap. 4.1), jedenfalls die neuester Generationen. Dabei ist
klar, dass diese Intelligenz in keiner Weise einer humanen Intelligenz nahekommt – was
aber auch keineswegs zwingend ist.
174. AUF DEM WEG ZU EINER DEZENTRALEN
AUTOMATISIERUNGSTECHNIK
4.1 Zum Stand der Automatisierungstechnik heute
Die aktuelle Automatisierungstechnik ist von dem Paradigma einer zentralistischen
Steuerung gekennzeichnet. Master-Slave-Systeme sind das dominierende
Architekturmodell: Ein Zentralserver verteilt die Tasks, die abhängigen Einheiten erfüllen
ihre Aufgaben und berichten an den Zentralserver.
Solche Systeme sind weder „ziel-basiert“ noch agieren sie als soziales Team: sie wissen
kaum, wer sie sind, wer ihre Nachbarn sind, was ihre Aufgabe ist, wie sie
zusammenwirken, was die Konsequenzen ihrer Fehler sein können, welche alternativen
Strategien es geben könnte usw. Was wie eine kooperative Robotik wirkt – etwa bei einer
Vielzahl von Robotern entlang einer Automobilfertigungsstraße – ist i.d.R. heute lediglich
ein zeitlich synchrones Abarbeiten verschiedener Task durch die beteiligten Roboter.
Das Modell der zentralistischen Steuerung führt dazu, dass die gesamte Struktur
typischerweise mit Systemen desselben Herstellers realisiert wird: Heterogene
Strukturen, also Systeme unterschiedlicher Hersteller, würden voraussetzen dass die
Zentralserver die verschiedenen Kommunikationsprotokolle beherrschen, diese sind
jedoch sogar mehrheitlich proprietär. Diversität der Hardware stellt heute ein Problem
dar und wird tunlichst vermieden, gleichzeitig behindert genau das den Einsatz
alternativer Techniken oder die Einführung neuer.
18Die Szene ist von einer hohen Standardisierungsphilosophie getrieben, allerdings nicht in
ganz wiederspruchsfreier Weise: Zwar ist die Feldbus-Ebene normiert, d.h. die
grundsätzliche Protokollebene zur Anbindung der Komponenten an den Server.
Hinsichtlich der Steuerungssprachen, die das eigentliche Verhalten der Systeme regeln,
dominieren jedoch derzeit noch die Hersteller-spezifischen, also nicht standardisierten
Sprachen.
Die Intelligenz heutiger Industrierobotik ist mehrheitlich beschränkt auf die – sehr präzise!
– Durchführung von Basisfunktionalitäten wie die Handhabung spezifischer Tools,
Navigation, Kollissionsvermeidung, und zentrale Prüffunktionen (z.B. die
integrierte Messung der Breite einer Schweißnaht). Wobei bereits das
letztgenannte keine durchgängige Eigenschaft mehr ist: So erkennen
etwa Roboter in einer Lackierstraße im Automobilbereich nicht, dass sie
aufgrund verstopfter Düsen ein ungleichmäßiges Lackbild produzieren.
Ein Ziel, das in den vergangenen Jahren bereits mehr und mehr erreicht
werden konnte, ist die Flexibilität der Anlagen in Bezug auf die Fertigung
mehrerer Varianten auf derselben Produktionslinie. Durch die
Abb. 12: Klassische Industrierobotik -
Ausstattung der Systeme mit mehr Sensoriken und interner CPU (oder
synchronisiert aber nicht kooperativ,
Zugang zu einer znetralen) wurde es möglich, dass Systeme die und ohne „Selbstwahrnehmung“;
angelieferten Teile bzw. den Zustand des halbfertigen Produkts korrekt Bild © M. Malcher Aachen
identifizieren und auf dieser Basis die nächsten Schritte durchführen. So
beherrschen insbesondere in der hochentwickelten deutschen Automobilfertigung
moderne Produktionslinien heute selbstverständlich die Fertigung mehrerer Modelle.
4.2 Automatisierungstechnik der Zukunft
Intelligenz
Die Zukunft der Automatisierungstechnik liegt darin, die Einzelsysteme mit mehr
Intelligenz auszustatten, zunächst einmal vor allem, um Prozess- und Produktqualität zu
erhöhen. Die Systeme umfassen zunehmend mehr Sensoriken, die etwa
Abweichungen vom Zielzustand früh feststellen. Integrierte
Fehleranalysen können im Idealfall das Verhalten noch im laufenden
Prozess anpassen oder notfalls den Prozess abbrechen, um weiteren
Schaden zu verhindern (im Fall des im Vorkapitel beschriebenen
Lackschadens wird die komplette Karosserie – nach Fertigstellung der
Lackierung – entsorgt, sie ist für den Verkauf vollständig unbrauchbar).
Kooperative Robotik und dezentrale Steuerungslogiken
Darauf aufbauend setzen moderne Robotikkonzepte insbesondere bei Abb. 13: Moderne Industrierobotik mit
dem Konzept einer „kooperativen Robotik“ an: Eine Vielzahl von intelligenter Kooperation
Forschungsprojekten in der Automatisierungstechnik adressiert die und Fehlererkennung;
Thematik, Roboter als Team agieren zu lassen. Der Hintergrund ist Bild © M. Malcher Aachen
evident: Werden Menschen mit einer komplizierten Aufgabe
konfrontiert, so lösen sie sie in Teamarbeit, und dies mit möglichst heterogenen
19Teammitgliedern, um die wechselseitigen Kompetenzen nutzen zu können. Genau dieser
Schritt steht in der Robotik derzeit an – die aktuellen Produktionssysteme umfassen zwar
oft viele Roboter, aber diese werden nur durch den Zentralserver zeitlich koordiniert, sie
agieren nicht als sich abstimmendes Team. Die neuen Erkenntnisse der Theorie verteilter
Systeme bilden die Grundlage für neue Modelle. Ein solcher Teamprozess unterliegt
notwendigerweise einem dezentralen Steuerungsparadigma.
Die Automatisierungstechnik der Zukunft steht vor dem gleichen Wandel, die der Bereich
des Höchstleistungsrechnens bereits hinter sich hat: Die weitgehende Ablösung
monolitischer Mainframes – es gibt Ausnahmen, gerade auch wieder in jüngster Zeit – zu
riesigen Blade-Clustern, auf denen parallele Algorithmen laufen, entspricht dem Wandel
weg von zentralistischen Master-Slave-Systemen hin zu dezentral organisierten
kooperativen Teams von Systemen.
Kommunikation auf der Basis natursprachlicher Analyse
Dazu sind aber erhebliche Steigerungen der „Intelligenz“ der heutigen Systeme
notwendig: Um kooperieren zu können, ist ein Verständnis der Gesamtaufgabe
notwendig, ein Verständnis der einzelnen Entität für seine Rolle im Team, ein Verständnis
der Rolle anderer, eine Übersicht über im Team verfügbare Kompetenzen, Spielregeln für
die „decision making processes“, die Fähigkeit zur gemeinsamen Entwicklung neuer
Arbeitsteilungen und Lösungsstrategien, die Fähigkeit der Kommunikation von
Intentionen gegenüber den anderen Teammitgliedern, …
Letzteres wird gerne unterschätzt: Naiv sollte man annehmen, dass sich
Roboter und andere technische Systeme aufgrund ihrer Möglichkeit
drahtloser, hochperformanter Funkverbindungen eher schneller und
unmittelbarer austauschen können sollten als Menschen. Das ist richtig
für den reinen Datenaustausch. Um aber zu „verstehen“ was die
Informationen des Senders inhaltlichen bedeuten bedarf es mehr. Nur
wenn die Systeme über „gleiche Protokolle“ verfügen, d.h. „gleiche
Sprachen“ sprechen, darf unmittelbar von einen gewissen „Verständnis“
ausgegangen werden. – Diese Verwendung standardisierter
Schnittstellen ist in heterogenen Teams – heterogen durch verschiedene
Hersteller – jedoch nicht gegeben. Hier müssen dann Ansätze aus einem Abb. 14: Kommunikation in 4.0-Systemen:
ganz anderen Bereich der KI greifen, dem Bereich der Computer- computerlinguistische Interpretation
für den Informationsaustausch;
Linguistik, der in den vergangenen zwei Jahrzehnten beeindruckende
Bild © M. Malcher Aachen
Ergebnisse hervorgebracht hat.
Kommunikation ist ein wichtiges Teilgebiet der Intelligenz. Ähnlich wie als
Gesamttendenz für die KI in Kap. 3.3 beschrieben, kann Sprachverständnis grundsätzlich
auf zwei Weisen erreicht werden: Der top-down orientierte Ansatz sieht eine
gemeinsame, standardisierte Hochsprache vor, die dann alle Community-Mitglieder
bedienen. Der bottom-up Ansatz hingegen versucht, auf der Basis statistischer oder
regelbasierter Analysen einen beliebigen Inhalts selbstständig zu erkennen.
20Natursprache statt Sprachstandards
Im Internet wurde der top-down Lösungsweg unter dem Titel „Semantic Web“ [29] um
2005 durch den Internetpioneer und heutigen Direktor des W3C (World Wide Web
Consortium) Tim Berners-Lee vorgeschlagen. Auf der Basis des RDF-Frameworks
(Resource Description Framework, [30]) sollten die Webinhalte in standardisierter Weise
semantisch angereichert werden. Es gehört zu den vielleicht besten Treppenwitzen der
Internet-Ära, dass dieser Ansatz überhaupt nicht funktioniert hat, wie Berners-Lee 2006
bekennen musste, dass dessen Ziel jedoch, nämlich die Daten des Internets durchsuchbar
zu machen, auszuwerten, Schlussfolgerungen zu ziehen usw., in exzellenter Weise
erreicht wurde!
Anstatt nämlich darauf zu setzen, dass alle Nutzer die Standards bedienen würden, – völlig
klar dass sie das nie tun würden – , kamen aus der Computerlinguistik völlig neue
Methoden des automatisierten Textverständnisses: Insbesondere der Bereich der
natursprachlichen Analyse NLP [31] konnte in den vergangenen zwei Dekaden eine
stürmische Erfolgsgeschichte verzeichnen. Die heutigen beeindruckenden Ergebnisse der
Big Data Technologie sind keinesfalls das Ergebnis des Einhaltens effizienter Standards,
sondern zeugen im Gegenteil von unserer Kompetenz, auch mit nicht-standardisierten
Inhalten umzugehen. Ein zentrales Element dieser Entwicklung sind die auf neuronalen
Netzen basierenden „Deep Learning Algorithmen“ (vergl. S. 12 und Kap. 4.4)
Biologische und Soziale Modelle als Vorbild
Hierin zeigt sich einmal mehr die immer stärker werdende Tendenz,
für effiziente technische Lösungen auf bestehende biologische
Modelle, teilweise sogar auf menschliche Vorgehensweisen,
zurückzugreifen, je „intelligenter“ die Systeme werden bzw. werden
sollen. Dieses Vorgehen wird in der Informatik als „Organic
Computing“ [32] [33] oder biologically-inspired computing bezeichnet
und kann in diesem Sinne auch auf die gesamte
Automatisierungstechnik übertragen werden. Denn auch die
menschliche Kommunikation schreibt nur „Eckdaten“ (Grammatik,
Vokabular) der Sprachverwendung vor – ein und derselbe
Zusammenhang kann aber auf unbegrenzt viele Weisen äquivalent Abb. 15: „Organic Computing“, hier in Bezug
repräsentiert werden. Ambiguitäten sind eher die Regel als die auf die Gestalt: Kofferfisch als Designvorlage
für Autos mit großem Innenraum und
Ausnahme, und Ungenauigkeiten etwa durch nicht-muttersprachliche
optimalen Strömungseigenschaften
Schreiber werden trotzdem verstanden. Bild © Fotomontage: SigNatur,
Fotos: DaimlerChrysler
Der Sieg des Offenheitsparadigmas
Die Übertragung der oben beschriebenen Geschichte des WWW auf die
Automatisierungstechnik jedenfalls bedeutet: Weder werden sich langfristig die
proprietären Herstellersprachen halten, noch werden alle Hersteller je eine gemeinsame
Standardsprache verwenden. Mehr und mehr Hersteller insbesondere aus China und
Korea drängen zudem auf den Markt. Offene Sprache – auf allen Ebenen, auf der der
Ansteuerung ebenso wie auf der des Informationsaustauschs unter den Systemen –
21werden mehr und mehr zur Regel: Deutsche Hersteller beginnen bereits, ihre Systeme für
moderne, etwa objektorientierte Programmiersprachen wie z.B. Java zu öffnen, um so die
Durchlässigkeit der Systeme zu unterstützen. Dabei handelt es sich natürlich um einen
trade-off: Einerseits bedeutet die Öffnung der Systeme eine verstärkte Gefahr, dass
Kunden nicht mehr Komplettsysteme beziehen, sondern Systeme kombinieren, wobei
insbesondere auch Preisvorteile ausgenutzt werden können. Andererseits besteht bei
Nichtöffnung die Gefahr, vollständig vom Markt verdrängt zu werden, wenn andere
Systeme diese Fähigkeiten beherrschen. – Zusätzlich zur Öffnung der Systeme gegenüber
offenen Sprachstandards ist aber auch in der Robotik langfristig eine Entwicklung zu
erwarten, die vergleichbar zum WWW-Kommunikation stärker auf der Ebene der
natursprachlichen Analyse angeht als über Sprachstandardisierung überhaupt. Ein
Babelfish für Roboter!
4.3 Modellierungen dezentraler Systeme durch
Multiagenten
Zentrales Mittel der Modellierung dezentraler Systeme sind die sogenannten
Multiagentensysteme. Aufgrund des zunehmenden Interesses für dezentrale
Steuerungsansätze ist das Paradigma der multiagenten-basierten Modellierung und
Simulation (MABS) ein viel versprechendes und aktuell rasch wachsendes
Forschungsgebiet, das inzwischen auch industrielle Anwendungen findet:
Das Modell
Ein Multiagentensystem besteht immer aus einer Anzahl selbstständig agierender
Softwaremodule, die die verschiedenen Komponenten des Gesamtsystems vertreten.
So wird in einem Team von Robotern typischerweise jeder Roboter durch einen
eigenen Agenten vertreten. Agenten müssen jedoch nicht zwingend physikalisch
getrennte Einheiten repräsentieren, sondern können auch verschiedene Aufgaben
innerhalb eines komplexen Organismus übernehmen: Ein Mehr-Arm-Roboter könnte Abb. 16: Mehr-Arm-Roboter
Justin, DLR: die Arme verfügen
etwa jeden seiner Arme durch einen eigenen Agenten modellieren, was konzeptionell
über eigene, getrennte Logiken;
z.B. bei dem Halbhumanoiden Justin des DLR realisiert wird, der auf zwei nachgiebigen Bild © DLR, CC-BY 3.0
Leichtbauarmen basiert [34]. Agenten werden auch in Systemen mit nicht-
körperbehafteten Entitäten eingesetzt, wie etwa zur
Modellierung des Zusammenspiels einer Gruppe von
Webservices, virtuellen Agenten also.
Funktionsweise
Die Agenten „vertreten“ eine Entität oder eine bestimmte
Aufgabe in dem Gesamtsystem. Sie handeln autonom
miteinander die Lösung aus, typischerweise „ohne
Masterbrain“. Sie haben die Fähigkeit,
Umgebungsinformationen aufzunehmen und damit in einer Abb. 17: Team Humanoiden modelliert als
sich verändernden Umgebung zu agieren [35]. Dabei haben Multiagentensystem, RoboCup Standard League
sie stets eine lokale Perspektive, d.h. kein Agent hat die volle Bild © Röfer et al. 2012
22Systemübersicht. Der Ansatz geht davon aus, dass in Systemen hoher Komplexität und
einer Vielzahl dynamischer Veränderungen eine globale Systemkenntnis weder möglich
noch sinnvoll ist – stattdessen müssen die Träger der lokalen Informationen miteinander
kommunizieren und in Verhandlungen treten. In der Regel liegt kein gemeinsamer
Speicher der Einzelentitäten vor.
Die einzelnen Agenten nehmen im Gesamtsystem verschiedene Rollen ein: In
symmetrischen Multiagentensystemen haben alle Agenten die gleichen Rechte, in
asymmetrischen sind bestimmte aufgrund ihrer Rolle ausgezeichnet. Auch eine
Kombination eines Multiagentensystems mit einem Masterbrain für bestimmte
Kompetenzbereiche ist möglich – in diesem Fall handelt es sich um ein hybrides System
(vergl. S. 15).
Die Fähigkeiten der Agenten können sehr unterschiedlich realisiert sein [36]: Einfache
Multiagentensysteme beherbergen rein reaktive Agenten, die auf der Basis von Stimulus-
Response-Mustern in geeigneter Weise auf veränderte Bedingungen reagieren.
Komplexere Ansätze umfassen Komponenten von „Proaktivität“ – hier sollen die Agenten
in der Lage sein, durch zielgerichtetes Verhalten eine Eigeninitiative zu übernehmen. Für
die Realisierung kreativer Lösungen in komplexen Situationen ist zweifellos die zweite
Ausrichtung klar wünschenswert, in eher wohlstrukturierten Situationen ist die erste
häufig ausreichend.
Diskussion
Der Unterschied von Agenten Systemen zu herkömmlicher
Softwareentwicklungen liegt damit darin, dass der Sourcecode in
selbstständige Teile gegliedert ist. Hier handelt es sich konzeptionell um
eine Erweiterung des objektorientierten Programmierparadigmas, in
dem Code zwar auch nach klaren Regeln in Teilen zerlegt wird, Klassen
und deren Objekte – diese jedoch in der Regel nicht als „selbstständig
handelnde“ Einheiten zu bezeichnen sind.
Multiagentensysteme realisieren den Kerngedanken der Kybernetik,
weil sie grundsätzlich nach einem bottom-up Ansatz funktionieren: Das
Verhalten der einzelnen Agenten bestimmt das Gesamtsystemverhalten
(in Abgrenzung zu zentralistischen Ansätzen, bei denen das gewünschte
Gesamtsystemverhalten vorgegeben wird, welches dann „rückwärts“
und top-down das notwendige Verhalten der Komponenten festlegt). Sie
sind – ebenso wie die Kybernetik – ein sehr interdisziplinäres Konzept
Abb. 18: Multiagentensystem,
und stark durch soziale und biologische Modelle inspiriert: Vorbilder sind
nach J. Lin et al., 2010;
z.B. menschliches Teamverhalten, Sozialverhalten staatenbildender Bild © M. Malcher Aachen
Insekten oder Schwarmverhalten von Fischen je nach Einsatzzweck
(vergl. S. 21).
23Sie können auch lesen