MTCAS - Ein Assistenzsystem zur Kollisionsverhütung auf See - Schiff & Hafen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

SCHIFFFAHRT & HÄFEN NAVIGATION UND KOMMUNIKATION
Abb. 1: Vorstellung des Assistenzsystems „MTCAS – Elektronische Maritime Kollisionsverhütung“ in Wilhelmshaven Foto: Daniel Clören
MTCAS – Ein Assistenzsystem zur
Kollisionsverhütung auf See
PROJEKTVORSTELLUNG Das steigende Unfallrisiko erfordert die Verbesserung der Kollisionsverhütung auf
See. Das nun der Öffentlichkeit vorgestellte „Maritime Traffic Alert and Collision Avoidance System“ (MTCAS) ist
ein innovatives Assistenzsystem und unterstützt Navigatoren dabei, Unfälle zu verhüten. Entwickelt wurde
MTCAS von einem Konsortium bestehend aus dem Oldenburger OFFIS – Institut für Informatik, Raytheon
Anschütz, Airbus, der Hochschule Wismar und dem Institut für Kommunikation und Navigation des Deutschen
Zentrums für Luft- und Raumfahrt (DLR).
Dr.-Ing. Christian Denker, Prof. Dr-Ing. Axel Hahn
D
er anhaltende Trend, immer größere Schiffe zu bauen im Auftragsbücher für Neubauten sind gut gefüllt und es wurden in
Hinblick auf die Kapazitäten für Fracht und Passagiere, der jüngsten Vergangenheit weniger Schiffe abgewrackt als neu
scheint zur Erhöhung des Unfallrisikos auf See beizutra- gebaut ( Jahresbericht Deutsche Marine 2015). In naher Zukunft
gen: Seit Jahren steigt die Anzahl der Schiffsunfälle. Allein im Jahr ist dadurch eine noch höhere Verkehrsdichte zu erwarten. Unter
2017, so berichtete es die European Maritime Safety Agency im anderem wird der Verkehr auch durch weitere Offshore-Tätigkei-
August 2018 (EMSA Facts & Figures 2017), waren 1204 Schiffe ten, wie die Errichtung von Windparks, weiter verdichtet. Neben
in europäischen Gewässern in navigatorische Unfälle verwickelt. der Einschränkung des Schifffahrtsraums wird diese Gesamtent-
2015 waren es um die 1000 Unfälle, die sich in den Kategorien wicklung ein Umdenken bei bestehenden Systemen erfordern.
Strandung, Kollision mit Schiffen und Kontakt widerspiegeln In Wilhelmshaven wurde nun mit „MTCAS – Elektronische
(EMSA Marine Casualties and Incidents 2016). Traut man den Maritime Kollisionsverhütung“ ein Assistenzsystem zur voraus-
Statistiken und wagt eine Interpretation, so könnte man schluss- schauenden und kooperativen Kollisionsverhütung der Öffent-
folgern: Die Verkehrsdichte nimmt zu, der Raum für Manöver lichkeit vorgestellt (Abb. 1). MTCAS hilft Navigatoren dabei,
nimmt ab und infolgedessen kommt es zu mehr Unfällen. Die trotz der steigenden Verkehrsdichte, sicher und effizient zu na-
54 Schiff&Hafen | November 2018 | Nr. 11
vigieren. MTCAS adaptiert die Grundidee der Einführung des diktion von Schiffsbewegungen anhand eines Wegenetzes, die die
Airborne Collision Avoidance System (ACAS) und dessen Im- Entwicklung einer Verkehrssituation prädiziert, und durch eine
plementierung TCAS aus der Luftfahrt. MTCAS zielt darauf ab, b) COLREGs-basierte Manöverprädiktion für zukünftige Schiffs-
den Wachoffizier auf der Kommandobrücke eines Schiffes bei begegnungen, die Aussagen darüber trifft, welche Manöver sich
der Erkennung und Lösung von kritischen Situationen mit ande- begegnende Schiffe höchstwahrscheinlich durchführen werden.
ren Schiffen unter Berücksichtigung der vorherrschenden Um- Beide Methoden wurden vom OFFIS entwickelt und konnten in
welt- und Verkehrsumstände zu unterstützen, aber auch relevante den ersten Evaluationsexperimenten in mehr als 80 Prozent der
Regelwerke und Vorschriften, die Bathymetrie sowie den Vessel Fälle korrekte Vorhersagen über Zielhäfen, Trajektorien und Ma-
Traffic Service (VTS) einzubeziehen. MTCAS greift nicht auto- növer bei Begegnung von Schiffen treffen und die Alarmgenerie-
matisch in die Steuerung eines Schiffes ein, sondern unterstützt rung verbessern. Die Prädiktionsmethoden erlauben einen Blick
die Seeleute dabei, gemeinsam sichere und effiziente Ausweich- in die zukünftige Entwicklung einer Verkehrssituation zu werfen
manöver zu finden. Dies ist ein Hauptunterschied zum TCAS aus und erlauben Navigatoren, sich darauf vorzubereiten. Beide Me-
der Luftfahrt, das verpflichtende Manöveranweisungen an die thoden bedürfen noch weiterer Forschung und Entwicklung, um
Piloten in einer kritischen Situation gibt. Wie das TCAS besteht deren Verlässlichkeit auszubauen.
auch das MTCAS aus zwei wesentlichen technischen Kompo- MTCAS kategorisiert jede Begegnung zwischen zwei
nenten, zum einen aus der Kollisionsdetektion und zum ande- Schiffen anhand einer Abstandsfunktion in einen von fünf Es-
ren der Kollisionsauflösung. MTCAS ist das Ergebnis eines vom calation States, die den Grad der Eskalation einer Begegnung
BMWi geförderten Verbundprojektes. beschreiben. Ist der Abstand zu einer Kollision sehr hoch und
damit keine Kollisionsgefahr gegeben, wird die Begegnung als
Kollisionsdetektion – Verbesserte Alarme durch Clear State kategorisiert. Kommen sich die Schiffe näher, wird
Vorhersagetechnologien die Begegnung als Recommendation State kategorisiert, indem
Die Kollisionsdetektion wird heutzutage auf Basis der Be- MTCAS den Navigator bei der taktischen Anpassung seines
rechnung des sogenannten Closest Point of Approach (CPA) navigatorischen Verhaltens in einem Seegebiet unterstützt. Im
durchgeführt. Dieser Punkt definiert die Position, an der sich Recommendation State sind die Schiffe zeitlich und räumlich
das eigene Schiff in Zukunft am nahesten zu einem bestimmten so weit getrennt, dass die Wegerechtsobligationen zwischen
anderen Schiff befindet. Auch das Fremdschiff hat einen CPA den Schiffen noch nicht beachtet werden müssen. Falls sich
zum Eigenschiff. Die Distanz zwischen beiden CPAs wird CPA die Kollisionssituation weiterentwickelt hat, sodass die >
Distance (CPAd) genannt und die Zeit, die es dauert, bis das ei-
gene Schiff am CPA angekommen ist, heißt CPA Time (CPAt).
In der Praxis gibt es diverse technische Systeme, die die Naviga-
toren bei der Berechnung des CPA unterstützen und automatisch
Alarme generieren, sobald die definierten Limits für CPAd und
CPAt unterschritten werden. Die Limits werden typischerweise
von der Schiffsführung vorgegeben. Kommt ein Fremdschiff dem Kloska MK-MARINE
Group
SOLAS RANGE SERVICES
eigenen Schiff zu nah, alarmiert zum Beispiel ARPA- bzw. die Ein Unternehmen
www.kloska.com der Kloska Group
ATT-Funktionalität im Radar. Diese automatisierte Berechnung
nimmt Navigatoren viel Arbeit ab. Bei einer hohen Verkehrsdich-
te jedoch kann die Alarmierung zu einem lästigen Unterfangen Seenot- und Rettungsmittel
Verkauf und Wartung
für die Brückenbesatzung werden. Der Grund dafür ist, dass nicht
alle Alarme tatsächlich kritisch sind. Die CPA-Berechnung ist Tragbare Feuerlöscher Tragbare Gaswarngeräte
eine lineare Vorausextrapolation auf Basis eines Schnappschusses Feste Brandschutzsysteme Atemluftgeräte und
der aktuellen Positionen, Geschwindigkeiten und Kurse von zwei Nieder- und Hochdruck
Kompressoren
Schiffen. In der Praxis bekommt der Navigator daher auch viele CO2-Anlagen
Notfall-Atemschutzgeräte
unrealistische CPA-Alarme, zum Beispiel für Begegnungen auf Rettungsinseln
FM-200-Löschanlagen
Land, für Schiffe, die hinter einer Mole im Hafenbecken liegen, Überlebensanzüge
Schaumanlagen
für Schiffe, die abseits von No-go Areas sind oder auch abseits der Aufblasbare
Wassernebel-
eigenen Route. Das zentrale Alarmmanagement des Brückensys- einrichtungen Rettungswesten
tems sorgt durch Alarmsignale dafür, dass die Crew die Alarme MK Chemikalienschutzanzüge
bemerkt. Verständlicherweise schwindet mit jedem nutzlosen Persönliche
und von der Navigation ablenkenden Alarm das Vertrauen in das Schutzausrüstungen
System, das für jeden Alarm ein Acknowledgement durch die MK-MARINE GmbH SOLAS-Range Services
Navigationscrew verlangt, um das Piepen und Blinken einzustel- Büro: Riedemannstraße 30 · 27572 Bremerhaven
Service: Westkai 50 · Tel.: +49 471 - 93220-584
len. Wie wird sich der Navigator hier langfristig verhalten, wird Email: contact.mk-marine@kloska.com
Internet: www.mk-marine.net & www.kloska.com
er in bestimmten Seegebieten gegenüber diesem System seine
Ignoranz aufbauen oder gar die Lautsprecher des Alarmsystems
ausbauen? Es läuft auf die Frage hinaus: Wie könnte intelligenter
alarmiert werden? MTCAS zielt darauf ab, die Alarme durch neue
Vorhersagetechnologien zu verbessern und überflüssige CPA-
Alarme werden durch MTCAS‘ Kollisionsdetektion verhindert.
MTCAS unterstützt den Navigator durch die Methoden a) Prä-
Schiff&Hafen | November 2018 | Nr. 11 55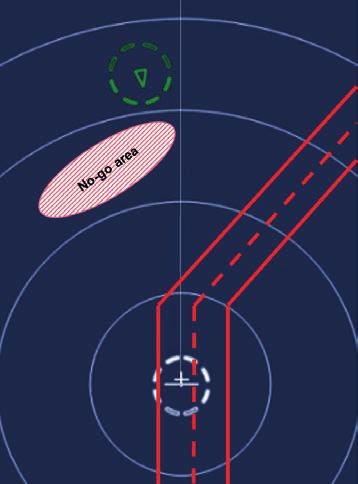
durchführen zu lassen. Diese gibt Aus- den Schiffe den in der Vergangenheit einge-
kunft über die aktuelle Verkehrssituation haltenen Mindestpassierabstand für Schiffe
und berechnet ein COLREG-konformes in einem Seegebiet berechnen kann. MT-
Ausweichmanöver, das No-go Areas der CAS kann somit Manöver und Kurs lokal
beiden Schiffe mit einbezieht. Die Funk- berechnen, die in der Vergangenheit nicht
tion berechnet zunächst die Wegerechts- zu Kollisionen geführt haben.
obligationen für Frontal-, Überhol- oder In Situationen, in denen alle an einer
Kreuzungssituationen, die auf Grundlage potenziellen Kollisionssituation beteiligten
der in den internationalen Kollisionsver- Schiffe mit MTCAS ausgestattet sind, kann
hütungsregeln definierten Peilungen zum die zweite Assistenzfunktion dafür genutzt
Fremdschiff in einer relativen Annäherung werden, einen Vorschlag zur Auflösung der
berechnet werden. Der im nächsten Schritt Kollisionssituation semi-automatisiert zu
von MTCAS ermittelte Manövervorschlag verhandeln (Abb. 3). Der Navigator star-
kann damit entweder eine Kursänderung tet die Assistenzfunktion zur Verhandlung
oder das Beibehalten des aktuellen Kurses von Ausweichmanövern. MTCAS bezieht
(im Recommendation State oder Danger alle von der kritischen Situation betroffe-
State) sein. Der Algorithmus zur Berech- nen Schiffe mit in die Verhandlung ein und
nung des Manövervorschlags berechnet berechnet rundenbasiert, automatisch und
das minimale Manöver unter Einbeziehung dezentral mögliche konsistente Ausweich-
der Schiffskörper, deren Bewegung und manöver und verteilt diese an die Navigato-
des Mindestpassierabstands für ein siche- Abb. 3: Visualisierung eines Verhand- ren an Bord der beteiligten Schiffe. Hierfür
res und effizientes Manöver. Zur Defini- lungsergebnisses im MTCAS Display beziehen alle MTCAS-Systeme die lokal
tion eines Mindestpassierabstands wurde Prototyp – das Fremdschiff (oben) ist auf dem Schiff vorliegenden No-go Areas
im Projekt eine Analyse von historischen Kurshalter (rote Markierung), das Eigen- mit ein. Weiter erwirkt der Verhandlungsal-
schiff (unten) ist ausweichpflichtig.
Schiffsbewegungsdaten durchgeführt. Das Allen Navigatoren werden die vorgeschla-
gorithmus, dass das Verhandlungsergebnis
Ergebnis der Analyse ist eine statistische genen Ausweichmanöver (oranger Pfeil) COLREG-konform ist. Falls es aber kei-
Methode, die auf Basis der Längen der bei- angezeigt. ne strikt COLREG-konforme Lösung >
G
7HLO$OOJ9RUVFKULIWHQ 7HLO $OOJ9RUVFKULIWHQ 7HLO $OOJ9RUVFKULIWHQ
0LFKDHOD5RVHQ
0RQLND.UDXWZXUVW 0LFKDHOD5RVHQ
7HLO.ODVVL¿]LHUXQJ 7HLO .ODVVL¿]LHUXQJ 7HLO .ODVVL¿]LHUXQJ
*WHUYHU]HLFKQLV *HIDKUJXWOLVWH *WHUYHU]HLFKQLV
7HLO )UHLVWHOOXQJVXQG 7HLO 6RQGHUYRUVFKULIWHQ 7HLO )UHLVWHOOXQJVXQG
6RQGHUYRUVFKULIWHQ XQG$XVQDKPHQ 6RQGHUYRUVFKULIWHQ
9HUZHQGXQJ 9HUZHQGXQJ
$'5
$'1
9HUZHQGXQJ
7HLO YRQ9HUSDFNXQJHQ 7HLO YRQ9HUSDFNXQJHQ 7HLO YRQ9HUSDFNXQJHQ
,0'*&RGH
XQG7DQNV XQG7DQNV 7DQNVXQG&78
7HLO9HUVDQGYRUVFKULIWHQ 7HLO 9HUVDQGYRUVFKULIWHQ 7HLO 9HUVDQGYRUVFKULIWHQ
PLW* HIDKUJXWYRUVFKULIWHQVDP PO X Q J
$ P H Q G P H Q W
%HI|UGHUXQJYRQJHIlKUOLFKHQ*WHUQ
*H ID K UJ X W6 WUD H %DXXQG3UIXQJ %DXXQG3UIXQJ %DXXQG3UIXQJ
7HLO YRQ9HUSDFNXQJHQ
XQG7DQNV
**%HI*ā*E9ā**96HHā0R8ā&78&RGH 7HLO YRQ9HUSDFNXQJHQ DXI%LQQHQZDVVHUVWUDHQ 7HLO YRQ9HUSDFNXQJHQ
7DQNVXQG&78
XQG7DQNV
9RUVFKULIWHQIUGDV
7HLO %HI|UGHUXQJV 9RUVFKULIWHQIU 7HLO
/DGHQ%HI|UGHUQ
YRUVFKULIWHQ 7HLO
GLH%HI|UGHUXQJ /|VFKHQXQGVRQVWLJH
+DQGKDEHQ
)DKUHUVFKXOXQJ 9RUVFKULIWHQIUGLH
$QKDQJ$ %HVDW]XQJGLH$XV
7HLO $XVUVWXQJXQG%H /LVWHGHUWHFKQLVFKHQ1DPHQ 7HLO
UVWXQJGHQ%HWULHE
WULHEGHU)DKU]HXJH
XQGGLH'RNXPHQWDWLRQ
9RUVFKULIWHQIU
7HLO
GHQ%DXXQGGLH
$QKDQJ% 7HLO
%DXYRUVFKULIWHQ
=XODVVXQJGHU *ORVVDUGHU%HQHQQXQJHQ
)DKU]HXJH
,1'(; $XV]XJDXVGHP$'5
5/%LQQHQODQG $OSKDEHWLVFKHV9HU]HLFKQLV 7HLO
GHU6WRႇHXQG*HJHQVWlQGH .DSLWHOXQG
$XV]XJDXVGHP,0'*
**%HI* **%HI* $EVFKQLWWXQG
,QNUDIWWUHWHQGHV
**96(% *E9 $'1hEHUHLQNRPPHQV
56(% **96HH **96(%
**$9 0R8 56(%
*E9 &78&RGH
**.RQWUROO9
$XÀDJH
2'9
**.RVW9
Bestell-Nr. 11132 Bestell-Nr. 11720 Bestell-Nr. 11702
Staffelpreise Staffelpreise Staffelpreise
1 Stück 43,00 € 1 Stück 135,00 € 1 Stück 75,00 €
ab 5 Stück 40,00 € ab 5 Stück 127,50 € ab 5 Stück 71,25 €
ab 10 Stück 38,00 € ab 10 Stück 120,00 € ab 10 Stück 67,50 €
ab 25 Stück 35,00 € ab 25 Stück 112,50 € ab 25 Stück 63,75 €
ab 50 Stück 33,00 € ab 50 Stück 105,00 € ab 50 Stück 60,00 €
Erhältlich bei Telefon: 0211-99193 0 · vvf@verkehrsverlag-fischer.de
www.verkehrsverlag-fischer.de
Schiff&Hafen | November 2018 | Nr. 11 57
SCHIFFFAHRT & HÄFEN NAVIGATION UND KOMMUNIKATION
Wegerechtsobligationen zum Tragen
kommen, befindet sich die Begegnung
zweier Schiffe im Escalation State Danger
State: Der Ausweichpflichtige hat dem
Kurshalter bei einer Begegnung entspre-
chend der Regularien die Vorfahrt zu
gewähren. Der intelligente CPA des MT-
CAS integriert No-go Areas, die geplante
Route des eigenen Schiffs und die verbes-
serte Genauigkeit der Positionen mittels
resilienter PNT-Datenprozessierung des
DLR in die Berechnung. Im Gegensatz
zum klassischen CPA wird bei der Be-
rechnung des intelligenten CPA eine
sogenannte Critical Ship Pose (CSP)
ermittelt. Die CSP ist die Pose (Latitu-
de, Longitude, Heading) der nahesten
Annäherung eines Fremdschiffes an das
eigene Schiff. In die Berechnung werden
Position sowie Kurs und Geschwindig-
keit über Grund als auch die jeweiligen Abb. 2: Die Critical Ship Pose (CSP) zeigt die Pose der dichtesten Annäherung auf Basis von
Abweichungen, die durch die PNT-Da- Positionsgenauigkeit, Kursschwankung und Geschwindigkeitsschwankung (links). Die CSP wird
aufgrund von No-go Areas und/oder der Route unterdrückt. Es wird kein Alarm ausgelöst (rechts).
tenprozessierung ermittelt wurden, mit
einbezogen. Stark vereinfacht ergeben
sich hieraus zwei trichterförmige Berei-
che, die mögliche zukünftige Aufenthalts- hart Steuerbord oder hart Backbord Ma- die Situation unklar ist, zum Beispiel das
orte der Schiffe darstellen, wie die Abb. 2 növer die Kollision mit dem Fremdschiff Fremdschiff noch nicht reagiert hat und es
(links) darstellt. No-go Areas, die diese noch abwenden könnte. MTCAS alarmiert doch eigentlich ausweichpflichtig wäre.
Bereiche schneiden, reduzieren dessen rechtzeitig vor der LLoD, sodass der Na- Ein Grund hierfür kann sein, dass die Si-
Größe. In dem Fall, dass die No-go Area so vigator Zeit hat, das richtige Manöver ein- tuationswahrnehmung aus der Perspektive
gelegen ist, dass die Schiffe sich gegensei- zuleiten. Überschreitet das Eigenschiff die des jeweiligen Schiffes unterschiedlich ist.
tig nicht erreichen können, wird die CSP LLoD, ohne dass ein Manöver eingeleitet Dann gilt es, für Klarheit zu sorgen – ge-
unterdrückt und nicht angezeigt (Abb. wurde, befindet sich die Begegnung im Ac- meinsam eine Lösung zu finden. Klassisch
2, rechts). Gleiches gilt, wenn die Route cident State und damit außerhalb der Sys- findet dafür eine Absprache über Seefunk
des Eigenschiffes nicht in den Bereich der temgrenzen des MTCAS. Eine Kollision (VHF) zwischen den Navigatoren statt.
CSP führt. Wenn sich der klassische CPA kann im Accident State höchstwahrschein- Englisch ist hierbei häufig die Zweitsprache
beispielsweise erst in zwölf Minuten erge- lich nicht mehr verhindert werden. Wie die zum Austausch zwischen den beteiligten
ben würde, die nächste Etappe der Route Schiffe kollidieren sollten, um Schäden ge- Schiffen, die von Navigatoren aus aller Welt
aber nicht in dessen Nähe kommt, weil das ring zu halten, ist Gegenstand anderer Sys- navigiert werden. Man stelle sich zum Bei-
Eigenschiff in einer Minute den Wheel- teme und Projekte. spiel einen moldawischen Kapitän im asia-
over-Point erreicht, so wird kein Alarm für tischen Seeraum vor. Mögliche Sprachbar-
diese vermeintliche Begegnung generiert. Kollisionsauflösung – Reduktion rieren und unzulängliche Akustik können
Sind beide Schiffe weitergefahren und von Missverständnissen durch zu folgenschweren Missverständnissen füh-
keiner der Navigatoren leitet ein Ausweich- Verhandlung ren. Besonders dann, wenn der Stresspegel
manöver ein, so eskaliert die Begegnung der MTCAS erkennt kritische Situationen in steigt, kann es leicht zum „Human Error“
Schiffe weiter in den Last Minute Manoeu- den drei Escalation States Recommendati- kommen. Wie können Kollisionssituatio-
vre (LMM) State. In diesem State greift Re- on, Danger und LMM. MTCAS alarmiert nen missverständnisfrei aufgelöst werden?
gel 17 b) der internationalen Kollisionsver- zuverlässig und dem Navigator obliegt Im MTCAS Projekt wurden zur Miss-
hütungsregeln: Auch der Kurshalter muss die Entscheidung über die nächsten von verständnis freien Auflösung von Kollisi-
ein Manöver einleiten, um die Kollision zu ihm einzuleitenden Schritte: Wie kann onssituationen zwei Assistenzfunktionen
vermeiden. Das Manöver des letzten Au- er die Situation klären? Kann er sie durch entwickelt: erstens zur Begegnungseva-
genblicks und wann dieses eingeleitet wer- ein einfaches Manöver im Rahmen seiner luation für den Navigator und zweitens
den muss, ist stark abhängig von den hydro- Ausweichpflicht entschärfen? Oder hat er zur Verhandlung von Ausweichmanövern
dynamischen Eigenschaften des jeweiligen durch die lokalen Gegebenheiten eventu- zwischen mehreren Navigatoren auf unter-
Schiffes. Auf Basis einer Fast Time Simu- ell gar keine Manöveroptionen und ist dies schiedlichen Schiffen.
lation der Hochschule Wismar berechnet dem Navigator des Fremdschiffs bewusst? Befinden sich zwei Schiffe in einer po-
MTCAS anhand eines Dynamikmodells Muss er eine Absprache mit einem oder tenziellen Kollisionssituation und ist nur
des Eigenschiffes die sogenannte „Last Line mehreren Fremdschiffen treffen, um die Si- eines der beiden mit MTCAS ausgestat-
of Defence“ (LLoD). Dies ist die Position tuation zu lösen? Typischerweise sollte der tet, so hat der Navigator die Möglichkeit,
des Eigenschiffes in der Zukunft, an der ein Navigator eine Absprache starten, wenn eine Begegnungsevaluation von MTCAS
56 Schiff&Hafen | November 2018 | Nr. 11SCHIFFFAHRT & HÄFEN NAVIGATION UND KOMMUNIKATION
Abb. 4: Während der Systemtests auf der Jade im Juli 2018 kamen sich die mit MTCAS ausgestatteten Schiffe „Senckenberg“ und „Zuse“
recht nah Foto: Daniel Clören
gibt, wird eine Lösung mit wenigen, nicht konformen Manövern MTCAS wurde fortlaufend in Simulatoren und auf See getestet
gefunden. Als Zwischenergebnis der Verhandlung wird der durch und erprobt. Für die Systemtests wurde zu Projektbeginn ein
den Verhandlungsalgorithmus ermittelte Vorschlag auf einem Szenarienkatalog erstellt, der Testläufe in unterschiedlichen
MTCAS-Display dargestellt, sodass ein einheitliches Lagebild Seegebieten (freier Seeraum, Küstengebiet, Linienrevier), mit
für jeden Navigator auf jedem Schiff entsteht. Im Projekt wurden und ohne Vessel Traffic Service (VTS) und Verkehrstrennungs-
hierzu die Funktionalitäten eines MTCAS-Displays in eine kom- gebiet (VTG), mit unterschiedlichen Schiffsausstattungsgraden
merzielle Radar-Software integriert. Auf Basis des Vorschlags auf (mit und ohne MTCAS-Ausstattung) sowie einer Differenzie-
dem Display kann der Navigator jedes Schiffes über die Annah- rung der anzuwendenden Kollisionsverhütungsregeln vorsieht.
me oder Ablehnung des Manövervorschlags entscheiden. Durch Die Szenarien wurden in den Simulator des eMIR-Testbeds
eine Ablehnung besteht die Möglichkeit, zusätzliches Wissen, programmiert und dazu genutzt, den Prototypen zu validieren
das dem System nicht vorliegt („Eisberg voraus“), mit in den Ver- und zu verifizieren. Die Assistenzfunktionen zur Verbesserung
handlungsprozess zu integrieren. der Alarme durch Vorhersagetechnologie und zur Reduktion
Einen Einsatz findet MTCAS nicht nur auf der Brücke, son- von Missverständnissen durch Verhandlung wurden erfolgreich
dern auch im Vessel Traffic Service (VTS) System, in dem der simulativ und auch an Bord von realen Schiffen in unterschied-
Verkehr beobachtet wird. Auch hier kann MTCAS die Alarm- lichen Ausbaustufen erprobt. Das Ziel hierbei war es, die Pra-
generierung verbessern. Abstimmungen zwischen Seeschiffen xistauglichkeit der erforschten Funktionalitäten in der Realität
werden auch im VTS System angezeigt: Die Information über sicherzustellen. Hierfür kamen das OFFIS-Forschungsboot
Annahme oder Ablehnung des Manövervorschlags wird transpa- „Zuse“ und der Forschungskutter „Senckenberg“ zum Einsatz.
rent an alle an der Verhandlung beteiligten Navigatoren und auch Beide Schiffe wurden mit MTCAS ausgestattet und fuhren
an das VTS verteilt. Sobald alle Einheiten den Manövervorschlag definierte Begegnungssituationen. Die Abb. 4 zeigt die Schiffe
angenommen haben, sollte dieser ausgeführt werden, um die Si- während einer Begegnungssituation im Sommer 2018. MTCAS
tuation zu entschärfen; anders als in der Luftfahrt ist dies jedoch und ACTRESS sind Projekte des BMWi. Unter dem Shortlink
nicht verpflichtend. Wird der Manövervorschlag abgelehnt, emp- https://is.gd/MTCAS ist das MTCAS-Projektvideo zu sehen.
fiehlt MTCAS einen Rückfall auf die klassische VHF-Funkkom-
munikation.
Durch Airbus und Raytheon Anschütz wurden Entwick- Die Autoren:
lungsprototypen des MTCAS konzeptioniert und umgesetzt Dr.-Ing. Christian Denker (Cooperative Mobile Systems/Senior
und nun im Testfeld eMIR (www.emaritime.de) mit der Techno- Researcher) und Prof. Dr.-Ing. Axel Hahn (Vorstand; Bereichsvor-
logieentwicklungsumgebung des ACTRESS-Projektes erprobt. stand Verkehr), OFFIS e.V. – Institut für Informatik, Oldenburg
58 Schiff&Hafen | November 2018 | Nr. 11Sie können auch lesen

















































