Systemdesign und Fehlerabschätzung der radio-akustischen Temperaturmessung
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

tm – Technisches Messen 2021; 88(3): 178–188 Dominik Exel* und Bernhard Zagar Systemdesign und Fehlerabschätzung der radio–akustischen Temperaturmessung System’s design and error limits of radio-acoustic temperature measurement https://doi.org/10.1515/teme-2020-0102 Schlagwörter: Temperaturmessung, RASS, Cramér-Rao Eingang 31. Dezember 2020; angenommen 24. Januar 2021 Schranke, Doppler-Radar. Zusammenfassung: Berührungslose Temperatur- und Abstract: Contactless temperature and flow velocity mea- Strömungsgeschwindigkeitsmessung ist von enormer surement is of enormous importance, both in climate re- Wichtigkeit, sowohl in der Klimaforschung aber auch bei search and in industrial applications. It is crucial for the industriellen Anwendungen. Dabei ist es für die Optimie- optimization of the systems to be able to estimate the ex- rung der Systeme entscheidend, die zu erwartenden Mess- pected measurement errors. In this article, one of the fehler abschätzen zu können. In diesem Beitrag wird eine methods the radio-acoustic sounding system (RASS) is ex- dieser Methoden basierend auf dem radio-akustischen tensively investigated. Measurement systems operating on Prinzip (RASS) umfassend untersucht. Messsysteme nach this method use the acoustic-electromagnetic interaction dieser Methode nützen die akustisch-elektromagnetische to infer the prevailing gas temperature from the spatially Wechselwirkung um aus der lokal ermittelten Schallge- resolved speed of sound, but also, if necessary, to infer schwindigkeit auf die vorherrschende Gastemperatur, the spatially acting component of the flow velocity in the aber gegebenenfalls auch auf eine lokale wirkende Kom- measurement direction. In order to achieve the goal of ponente der Strömungsgeschwindigkeit in Messrichtung analyzing the measurement system in its entirety, the so- zu schließen. Um das Ziel zu erreichen, das Messsystem called RASS equation and the necessary collocation con- in seiner Gesamtheit zu analysieren, wird zunächst die dition of the sources are discussed first. The expression sogenannte RASS-Gleichung sowie die notwendige Kollo- of the backscattered power indicates which factors have kation der Quellen diskutiert. Anhand des Ausdrucks der a decisive influence on the system behavior. Appropriate Empfangsleistung wird gezeigt, welche Faktoren maßgeb- matching of the sound and Radar wavelengths and perfect lich das Systemverhalten beeinflussen. Eine entsprechen- collocation of their sources are essential for a sufficiently de Abstimmung der Schall- bzw. Radar–Wellenlängen und accurate estimate of the temperature-dependent Doppler eine perfekte Kollokation deren Quellen sind essentiell für frequency. Afterwards, to the best knowledge of the au- eine ausreichend genaue Schätzung der von der Tempe- thors, an optimal system design is derived for the first time ratur abhängigen Doppler-Frequenz. Anschließend wird, based on the Cramér-Rao lower bound. It can be seen that nach Wissen der Autoren erstmalig anhand der Cramér- the variance of the temperature estimate is inversely pro- Rao Schranke ein optimales Systemdesign abgeleitet. Da- portional to the 4th power of the number of interacting bei zeigt sich, dass sich die Varianz der Temperaturschät- sound cycles. It is also demonstrated that the temperature zung verkehrt proportional zur 4. Potenz der Anzahl der and the flow velocity cannot be estimated independently wechselwirkenden Schallzyklen verhält. Weiters wird de- of one another. In this article a setup is presented that al- monstriert, dass die Temperatur und die Strömungsge- lows the temperatures to be measured with a standard de- schwindigkeit nicht unabhängig voneinander geschätzt viation of about ±0,2 °C. A temperature profile measure- ment is presented as a demonstration. werden können. Es wird in diesem Beitrag ein Aufbau prä- sentiert, der es erlaubt die Temperaturen mit einer Stan- Keywords: Temperature estimation, RASS, Cramér-Rao dardabweichung von etwa 0,2 °C zu messen. Zur Demons- lower bound, Doppler radar. tration wird eine Temperaturprofilmessung vorgestellt. *Korrespondenzautor: Dominik Exel, Johannes Kepler Universität Linz, Institut für Elektrische Messtechnik, Altenbergerstraße 69, 1 Einleitung 4040 Linz, Austria, E-Mail: dominik.exel@jku.at Bernhard Zagar, Johannes Kepler Universität Linz, Institut für Die Möglichkeit eine Gastemperatur nicht nur berührungs- Elektrische Messtechnik, Altenbergerstraße 69, 4040 Linz, Austria los sondern auch über eine nennenswerte Distanz mes- Open Access. © 2021 Exel and Zagar, publiziert von De Gruyter. Dieses Werk ist lizensiert unter einer Creative Commons Namensnennung 4.0 International Lizenz.

D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung | 179
sen zu können erlaubt gerade in rauen industriellen Um- Die Tatsache, dass dadurch nur eine mittlere Temperatur
gebungen Einsatzbereiche, die alternativ nur sehr schwer √ϑ ermittelt werden kann, stellt einen Nachteil der akus-
abzudecken wären. So bietet die Möglichkeit in der Gicht tischen Gastemperaturmessung dar. Durch mehrere Mess-
eines Hochofens ein vollständiges Temperarturprofil zu pfade die sich überkreuzen lassen sich durch tomographi-
bestimmen, Einflussmöglichkeiten auf die Qualität von sche Rekonstruktion Temperaturverteilungen, z. B. im Vo-
Roheisen. Aber auch die kontinuierliche Überwachung lumen eines Ofens, darstellen [5, 6, 7]. Im Gegensatz dazu
der Temperatur entlang eines Hubbalken- oder Durchlauf- kann mit der RASS Methode mit nur einer Messstelle be-
ofens erlaubt die Realisierung entscheidender Qualitäts- rührungslos und grob örtlich aufgelöst die Gastemperatur
vorteile. Diese Methode zur berührungslosen Tempera- gemessen werden [8, 9].
turmessung erlaubt, im Gegensatz zur häufig verwende- Um diese Messmethode zu analysieren, wird dieser Ar-
ten und auf die Messung der Oberflächentemperatur von tikel folgendermaßen gegliedert:
Körpern beschränkten Pyrometrie den Einsatz in Gasen. In Abschnitt 2 wird die Funktionsweise des RASS be-
Ebenso wie für die Pyrometrie ist auch hier im weitesten schrieben und die sogenannte RASS-Gleichung angege-
Sinne ein ‘Sichtzugang’ notwendig. Auch die Möglichkeit ben. Das Blockschaltbild eines Doppler–Radars als ei-
zur Messung an bewegten, schwer zugänglichen Objekten nes der Hauptkomponenten, sowie die Signalverarbeitung
stellen klare Vorteile dar. werden in Abschnitt 3 präsentiert. Weiters wird auch ein
Bei der klassischen akustischen Gasthermometrie geeignetes Signalmodell vorgestellt und das sich ergeben-
wird die Temperatur–Schallgeschwindigkeitsbeziehung, de Frequenzschätzproblem diskutiert. In Abschnitt 4 wird
welche für ein bekanntes Gasgemisch einen eindeutigen die Cramér–Rao Schranke berechnet, aus der sich eine op-
Zusammenhang aufweist, ausgenützt. Wird in Luft bei an- timale Systemauslegung ableiten lässt. Da von den Auto-
nähernd Standardbedingungen, also in einem von einem ren bereits in [3] und in [9] Labormessungen bzw. Messun-
idealen Gas nur gering abweichenden Medium, gemessen, gen bei einer nicht perfekten Kollokation der Quellen vor-
so lautet der Zusammenhang näherungsweise gestellt wurden, werden in diesem Beitrag in Abschnitt 5
neben der Beschreibung des Messablaufes auch neuere
Ergebnisse zur Messung eines Temperaturprofiles präsen-
κ⋅R⋅ϑ
ca = √ = Ka ⋅ √ϑ , (1) tiert.
M
mit ca der Schallgeschwindigkeit (der Phasengeschwindig-
keit) in m/s, κ dem Isentropenexponent (≈ 1,40 für Luft), 2 Funktionsweise
R = 8,314 . . . der allgemeinen Gaskonstante in J/(mol K)
und ϑ der Temperatur in K [4]. Die Konstante Ka = 20,045 Das wesentliche Merkmal eines RASS ist die Kombinati-
in m/(s√K) gilt für das Medium Luft. on einer elektromagnetischen Sende- und Empfangsein-
Die Schallgeschwindigkeit wird über die Laufzeit T ei- heit, mit einem akustischem Sender [10]. Konkret wird
nes Schallpulses, der mehrere Perioden umfasst und da- eine leistungsstarke, sphärische Ultraschallwelle ausge-
mit örtlich mittelt, entlang des Pfades s zwischen den sandt und mittels eines Doppler-Radars die (radiale) Aus-
Punkten A und B gemessen. Damit lässt sich rechnerisch breitungsgeschwindigkeit dieser, den lokalen Brechungs-
eine mittlere Temperatur ϑ entlang des betrachteten Teils index modulierenden, Welle gemessen, siehe Abbildung 1.
AB des Signalpfads bestimmen. Aus der Laufzeit T, die Propagierender Schall in einem Gas bewirkt lokal eine Ex-
sich einerseits aus der durchlaufenen Strecke AB dividiert pansion bzw. Verdichtung des Ausbreitungsmediums (um
durch die gemittelte Geschwindigkeit ca = Ka ⋅ √ϑ und an- ±Δp(t)), so dass sich ein Druck von p(t) = p0 ± Δp ein-
dererseits aus dem Integral der mit variabler Geschwindig- stellt. Diese Druckschwankung um den statischen Druck
keit ca (s(ϑ)) durchlaufener Streckenabschnitte ds berech- p0 führt, entsprechend der Gladstone-Dale Beziehung für
net, folgt: Gase
B B na − 1 ρ p ± Δp 1/κ
1 1 = a =( 0 ) ,
T= ⋅ ∫ ds = ∫ ds , na,0 − 1 ρa,0 p0
Ka ⋅ √ϑ ⏟⏟⏟⏟⏟⏟⏟⏟⏟ Ka ⋅ ϑ(s)
√
A A na,0 − 1
Δna = ⋅ Δp , (3)
AB κ ⋅ p0
B −1
√ϑ = 1 ⋅ ∫ ds zu einer lokal wirkenden, sehr geringen Abweichung vom
{ }
} . (2)
AB ϑ(s)
{ √
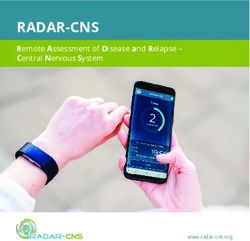
{A } mittleren Brechungsindex na (s) = na ± Δna (s) = 1, 000292 ±180 | D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung Δna (s). Die Größenordnung kann abgeschätzt werden (κ = 1, 40, p0 = 101325 Pa, Δp = 200 Pa @ 140 dB Schalldruck- pegel, ρa Dichte der Luft) mit Δna = 412 ⋅ 10−9 . Für eine mit dem gleichen Wellenvektor propagieren- de elektromagnetische Welle stellt der Gradient der Dich- te und somit der Gradient des Brechungsindex ∇na (s) ei- nen deterministischen Streuer dar, der mit einer gewissen, relativ geringen Effektivität rückstreuend wirkt [11, 12]. Die propagierende Schallwelle stellt bei geeigneter geo- metrischer Anordnung also einen bewegten Rückwärts- streuer für die elektromagnetischen Wellen dar. Da sich die Fortbewegungsgeschwindigkeit der Schallwelle aus der Phasengeschwindigkeit ca (s) und einer Strömungsge- schwindigkeit vw (vw ist die Komponente des Geschwin- digkeitsvektors v⃗w projiziert in die Ausbreitungsrichtung der elektromagnetischen Welle [14]) zusammensetzt, re- sultiert daraus eine entsprechende Dopplerfrequenzver- schiebung fd , die aus dem Radar-Empfangssignal mess- technisch ausgewertet werden kann [1, 13] 2 ⋅ (ca (s) + vW ) fd = fe . (4) c fe ist die Frequenz der elektromagnetische Welle in Hz und c die Lichtgeschwindigkeit im Medium (Luft) in m/s (in Luft ergibt sich c = 2,99792 ⋅ 108 /na m/s). Abb. 1: Bei der Interaktion zwischen der elektromagnetischen mit Wie oben dargelegt, ist die Variation des Brechungs- der akustischen Welle kommt es zu Streuungen des Radar-Signals. Ein geringer Teil, das RASS Echo, wird an die Sende- und Empfangs- index selbst bei signifikant großen Schalldruckpegeln nur einheit zurück reflektiert. Das dopplerverschobene, empfangene sehr gering, daher muss bei der Systemauslegung danach Signal enthält die Information der lokalen Temperatur [15]. getrachtet werden, maximale Rückstreueffizienz zu erzie- len. Dazu sind die folgenden Bedingungen wichtig: a) Bragg–Bedingung: Die Bragg–Bedingung beschreibt die Abstimmung der Rauschen bei der Frequenzschätzung nimmt zu. Um- elektromagnetischen λe auf die akustische Wellenlän- gekehrt führt eine Steigerung der Schallwellenzüge zu ge λa [18] einer verringerten Ortsauflösung aber einer wesentli- chen Verbesserung des Signal zu Rauschverhältnisses λe = 2λa . (5) im Radar-Empfänger und damit zu einer Frequenz- schätzung mit geringerer Varianz. Ist die elektromagnetische Wellenlänge genau dop- c) Kollokation: pelt so groß wie die akustische, dann kommt es Die Effizienz des RASS wird verbessert wenn die von zu einer konstruktiven Interferenz der von den vie- den sphärischen Dichtemodulationen rückgestreuten len Phasenfronten der akustischen Welle zurück- Radar-Wellen sich im Phasenzentrum der Empfangs- gestreuten Radar-Wellen am Ort des Empfängers antenne konstruktiv überlagern. Da die Phasenfron- [19]. Ausgedrückt in Wellenzahlen lautet die Bragg– ten der elektromagnetischen und auch der akusti- Bedingung schen Welle eine jeweils sphärische Form aufweisen, ka = 2ke . (6) muss erreicht werden, dass deren Phasenzentren zu- sammenfallen (= konfokale Anordnung der Quellen, b) Optimal gewählte Anzahl NB der Schallwellenzüge. Hochtöner und Radar-Antenne). Das bedeutet, dass Wird diese klein gewählt, so erhöht sich die Ortsauf- die Phasenzentren von Hochtöner und Radar-Antenne lösung der Temperaturmessung, da über einer gerin- identisch sein sollten gere Distanz AB gemittelt wird, allerdings sinkt die Rückstreueffizienz sehr stark ab und der Einfluss von n⃗ e = n⃗ a . (7)
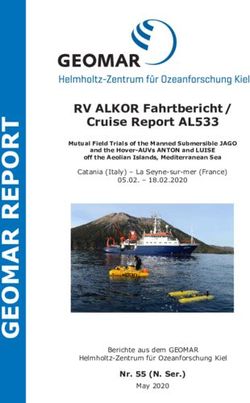
D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung | 181 Tab. 1: Parameter, Beschreibungen und Einheiten für die Glei- chung (8). 3 Signalverarbeitung Parameter Beschreibung Einheit Die Signalverarbeitungskette gliedert sich grob in folgende Schritte: Pr Empfangsleistung Radar W Pt Sendeleistung Radar W a) Nach Aussenden der akustischen Welle, Messdaten Pa akustische Sendeleistung W des Doppler-Radar aufzeichnen, kg W b) aus den aufgenommenen Daten die Dopplerfrequenz Aa Proportionalitätskonstante m2 s Gt Antennengewinn dB für verschiedene örtliche Bereiche bestimmen, θr Antennenstrahlbreite rad c) aus der jeweiligen Dopplerfrequenz die Strömungsge- NB Anzahl der Bragg–Zyklen 1 schwindigkeit bzw. Temperatur berechnen. R Abstand Messposition Phasenzentrum m λa akustische Wellenlänge m λe elektromagnetische Wellenlänge m Der Messablauf wird in Abschnitt 5 im Detail beleuchtet. ka akustische Wellenzahl rad Grundsätzlich handelt es sich bei der Signalverar- m ke elektromagnetische Wellenzahl rad beitung der RASS Signale (des Radar-Echos), um das m Problem der Schätzung einer Dopplerfrequenz aus sehr schwachen und daher stark verrauschten Empfangssigna- len. Daher wird zuerst ein mögliches Signalmodell vorge- n⃗ a beschreibt den Wellenvektor (Ausbreitungsvektor) stellt und anschließend gezeigt, wie aus den aufgenomme- der akustischen Welle und n⃗ e stellt den Poynting– nen Daten die Dopplerfrequenz optimal geschätzt werden Vektor der elektromagnetischen Welle dar. kann. Konkret wird das über ein feines Metallgitter reali- siert. Dieses Gitter wirkt für die elektromagnetischen Wellen wie ein Umlenkspiegel und lenkt die Radar- Signalmodell Wellen in den Ausbreitungspfad der Schallwellen, die sich durch das kleinmaschige Gitter unbeeinflusst In Abbildung 2 ist eine einfache Realisierung eines mo- ausbreiten [14]. nostatischen Doppler–Radars dargestellt. Eine detaillier- te Beschreibung der Funktionsweise ist z. B. im bekannten Mit der RASS–Gleichung, welche in [1, 3] genauer betrach- Werk vom Skolnik [20] angeführt, folglich wird nur kurz tet wurde, kann die vom Radar empfangene Leistung als der Ablauf beschrieben. Funktion von verschiedenen Parametern des Messsystems Ein Frequenz–Synthesizer (ein in der Frequenz sehr berechnet werden. genau regelbarer Oszillator) generiert ein hochfrequentes Mikrowellensignal. Im Sendepfad wird dieses Signal zu- A2a π 2 Pt Pa Gt2 θr4 NB2 λa 2 NB λa 2 Pr = ( ) sinc [(2k e − ka ) ] (8) nächst durch einen Splitter, welcher einen Teil des Signals 16R2 λe 2 auch dem im Empfangsteil liegenden Demodulator zur In der Tabelle 1 sind alle Parameter mit den entsprechen- Verfügung stellt, und anschließend durch einen Zirkulator den Einheiten aufgelistet. Von Gleichung (8) ist zu sehen, geführt, der eine effektive Isolation des Empfangsteils vom dass die Empfangsleistung eine R−2 Abhängigkeit auf- Sendeteil erlaubt [21]. Anschließend wird das Sendesignal weist. Das ist auf die sphärisch divergierende akustische über eine Antenne abgestrahlt. Der Zirkulator ist notwen- Welle zurückzuführen [16, 17]. Weiters ist die Empfangs- dig, da das Radar-System monostatisch ausgeführt ist und leistung proportional zum Quadrat der Bragg–Zyklen NB2 , somit die Signalrichtungen aufgetrennt werden müssen. zur elektromagnetischen Sendeleistung Pt und zur akusti- Das empfangene, dopplerverschobene RASS–Echo wird schen Sendeleistung Pa . Ein wichtiger Aspekt ist die Ma- über den Zirkulator in den Mischer geleitet. Die einfachs- ximierung des Funktionswertes der Sinc–Funktion, also te mögliche Modellierung für den Mischvorgang ist eine der idealerweise vollständig kohärenten Überlagerung der Multiplikation der beiden Signale [20]. Anschließend wird Rückstreuungen. Ersichtlich, wenn die Gleichung (6), al- das nach einer Tiefpass-Filterung verbleibende niederfre- so die Bragg–Bedingung, in den Ausdruck für die Emp- quente Signal verstärkt, gefiltert und digitalisiert. fangsleistung (8) einsetzt wird. Die Kombination von (8) Um die Signalauswertung auf den aktuell interessie- mit dem im nächsten Abschnitt hergeleiteten Signalmodel renden Ortsbereich R ≤ s < (R + λa ⋅ NB ) einzuschrän- liefert nun die Grundlage für das optimierte Systemde- ken, definiert man Indizes, die für diese Grenzen (der floor- sign. Operator ⌊. . . ⌋ gibt die größte ganze Zahl, die kleiner als
182 | D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung
Abb. 2: Mit einem Doppler-Radar wird die Geschwindigkeit eines Schallpulses gemessen. Diese Abbildung zeigt ein Blockschaltbild eines
monostatischen kontinuierlichen Doppler-Radars. Für eine detaillierte Beschreibung der Signalentstehung wird auf das bekannte Werk von
Skolnik [20] verwiesen.
das Argument ist) Gaußsches Rauschen (AWGR) mit Varianz σ 2 , w[n] ∼
N (0, σ 2 ) überlagert. Das zugehörige Messdatenmodell
R
NA = ⌊ ⌋ lautet somit
ca,0 ⋅ Ts
R + λa ⋅ NB s[n] + w[n] für Schallwellenpaket
NE = ⌊ ⌋ {
ca,0 ⋅ Ts
{
{
{
{
{ im Auswertebereich
{
{
{ = A cos (ξ (K √ ϑ +v w ) n + ϕ) + w[n]
und ein Analysefenster ω(n), {
{ a
x(n) = {
{
{ 0 für 0 ≤ n ≤ NA − 1 {
{
{
{ w[n] für kein auswertbares
{ {
ω(n) = { 1 für NA ≤ n ≤ NE {
{
{ Schallwellenpaket im
{ {
{ 0 für NE + 1 ≤ n < ∞ { Auswertebereich
das aus dem kontinuierlich digitalisierten Signal nur je- mit ξ = 4π ⋅ Ts ⋅ fe /c. In den folgenden Abschnitten stellt
ne Werte extrahiert, die relativ zum Zeitpunkt der Aussen- diese Gleichung die Grundlage für den Temperaturschät-
dung des Schallwellenpakets im gesuchten, auszuwerten- zer, sowie für die Berechnung der Messunsicherheit dar.
den Ortsbereich liegen. Die verwendeten, kommerziellen Komponenten des
Daraus ergibt sich das gefensterte und digitalisierte Messaufbaus sind in der Tabelle 2 aufgelistet. Ausgehend
(Abtastrate 1/Ts ) deterministische Signal s [n], das weiter von einem 10 GHz Synthesizer wurde das System so aus-
ausgewertet wird. gelegt, dass Temperaturen zwischen −10∘ C und +50∘ C ge-
messen werden können. Das bedeutet, dass aufgrund der
s[n] = A ⋅ cos(2π ⋅ fd ⋅ n ⋅ Ts + ϕ)
Bragg–Bedingung (5) Schallfrequenzen zwischen 21,7 kHz
f
= A ⋅ cos [4π e Ts (Ka ⋅ √ϑ + vw ) ⋅ n + ϕ] (9) und 24,0 kHz erforderlich sind. Zu diesem Zweck wurde
c
der Hochtöner Ground Zero GZCT 0500X [22] gewählt. Die-
n ist der Abtastindex, mit n = 0, 1, ⋅ ⋅ ⋅ , (NE − NA ). A ist die ser erlaubt einen Schalldruckpegel von zumindest 90 dB
Amplitude der deterministischen Komponente im Signal, (ref. 2 ⋅ 10−5 Pa) zu erzeugen.
Ts das Abtastinkrement. Die zufällige Phase des Signals
wird mit −π ≤ ϕ < π angenommen. In (9) wurde die Dopp-
lerfrequenz fd durch den Ausdruck (4) ersetzt. Weiters Schätzer für die Dopplerfrequenz
wurde die Schallgeschwindigkeit–Temperaturbeziehung
(1) miteinbezogen. Wie aus (9) leicht erkennbar ist, ist die gesuchte
Da jede reale Messung mit Rauschen kontaminiert Temperatur- bzw. Strömungsgeschwindigkeit in der Fre-
ist, wird hier dem abgetasteten Signal nach dem Analog– quenz des auf das Basisband gemischten Radar-Signals
Digital–Umsetzer (vgl. Abb. 2) mittelwertfreies, weißes enthalten. Somit kann die RASS Messung grundlegendD. Exel und B. Zagar, Systemdesign und Fehlerabschätzung | 183
Tab. 2: Verwendete Komponenten für den realen Systemaufbau. Alle
der zu schätzenden Parameter β = [ϑ vw ]T für einen er-
verwendeten Bauteile sind kommerziell erhältlich.
wartungstreuen Schätzer berechnet werden.
Radar-System Der Übersichtlichkeit halber wird zunächst die unbe-
CW Sendefrequenz 10 GHz kannte Amplitude und Phase ignoriert. F beschreibt eine
HF - Synthesizer NI QuickSyn Lite FSL-0020 2 × 2 große Fisher Informationsmatrix (FIM). Für ein addi-
HF - Splitter Mini-Circuits ZX10-2-183+ tives, weißes, Gaußsches Messrauschen, wie es in [24] dis-
HF - Verstärker Mini-Circuits ZX60-24+
kutiert wird, kann die FIM geschlossen berechnet werden
HF - Zirkulator Pasternack PE8403
HF - Mischer Mini-Circuits ZX05-24MH+ mit
Antenne Flann Gain Horn Series 16240-20
Variabler Verstärker Analog Devices AD8331-EVAL 1 N−1 s[n; β] s[n; β]
[F(β)]ij = ∑ . (13)
ADC NI 6356 σ 2 n=0 βi βj
Akustisches Setup
DAC NI 6356 Für das konkrete Signalmodell (9) berechnet sich die FIM
Verstärker Peavey CS4000
zu
Hochtöner 1 Ground Zero GZCT 0500X
Ka2 Ka
ξ 2 A2 N 3 4ϑ
F(β) ≈ [ Ka
2√ϑ ]. (14)
σ2 6 1
2√ϑ
auf ein Frequenzschätzproblem zurückgeführt und auch
dementsprechend analysiert werden. Für die Berechnung der Varianzen (12) muss die Inverse
Für den Fall von additivem, Gaußschem Rauschen der FIM berechnet werden. Bei der Überprüfung für die
kann allgemein gezeigt werden, dass die diskrete Fourier– Existenz der Inversen von (14) zeigt sich, dass det(F) = 0
Transformation (DFT) ein erwartungstreuer Schätzer mit gilt, es sich also um eine singuläre Matrix handelt und
minimaler Varianz ist. Da für das angegebene Signal- somit kein erwartungstreuer Schätzer mit endlicher Vari-
modell entweder eine einzelne starke Spektralkomponen- anz existiert [26]. Die Temperatur ϑ und die Strömungsge-
te oder nur ein Rauschspektrum zu erwarten ist, ergibt sich schwindigkeit vw können daher nicht unabhängig vonein-
die Frequenzschätzung aus der Position eines möglichen
ander geschätzt werden. Ist jedoch einer dieser Parameter
Maximums des Betragsspektrums [24]
bekannt, so ist es möglich den jeweils anderen Parameter
NA −NE 2 zu schätzen, bzw. die CR–Schranke zu berechnen. Werden
f̂d = arg max { ∑ x[n] ⋅ e−j2πfTs n } . (10)
die messtechnisch irrelevanten, unbekannten Parameter
f n=0
Amplitude und Phase miteinbezogen, so ändert sich die
Die Frequenz der maximalen Spektralkomponente stellt Situation nicht, nur die Berechnung der CR–Schranke ge-
die geschätzte Dopplerfrequenz dar. Das Zirkumflex über staltet sich umfangreicher.
der Dopplerfrequenz f̂d weist auf einen Schätzwert hin. Unter der notwendigen Annahme der bekannten Tem-
Aus der Kombination von (1) und (10) folgt für die zu schät- peratur erhält man nach kurzer Herleitung eine untere
zende Temperatur ϑ̂ Schranke für die Schätzvarianz zur Strömungsgeschwin-
digkeit (mit N = NE − NA + 1)
2
f̂ ⋅ c
ϑ̂ = ( d ) . (11) c2 12
2 ⋅ fe ⋅ Ka var {v̂ (15)
w} ≥ .
4fe2 (2π)2 ηTs2 N 3
4 Unsicherheit der Der Parameter η beschreibt dabei den Signal-Rausch-
abstand (SRA) [24, 25]
Frequenzschätzung
η = A2 /(2σ 2 ). (16)
Bei industriellen Anwendungen ist es notwendig, die zu
erwartende Messunsicherheit eines Messsystems zu ken- Ähnliches gilt auch bei bekannter Strömungsgeschwindig-
nen. Mit Hilfe der Cramér–Rao–Schranke (CR–Schranke) keit. Eine untere Schranke für die Varianz der Temperatur-
kann eine untere Grenze für die erreichbare Schätzvarianz schätzung lautet dann
[24]
2 2
̂ ≥ c ϑ
var {ϑ}
12
. (17)
var{β̂i } ≥ [F (β)]ii
−1
(12) Ka2 fe2 (2π)2 ηTs2 N 3184 | D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung
Wendet man den Ausdruck Ts2 N 2 = (λs2 NB2 )/ca2 auf (17) an,
so vereinfacht sich der Ausdruck für die Varianz der Tem-
peraturschätzung zu
12ϑ2
var {ϑ}
̂ ≥ . (18)
π 2 ηNNB2
Aus (18) kann geschlossen werden, dass sich die Vari-
anz der Temperaturschätzung proportional zum Quadrat
aktuellen Temperatur ϑ bzw. indirekt proportional zum
Quadrat der Anzahl der Bragg–Zyklen NB2 ändert.
Aus (8) erkennt man, dass die akustische Sendeleis-
tung Pa die elektromagnetische Empfangsleistung beein-
flusst und somit auch entsprechend den SRA. Teilt man
den SRA gezielt in einen Faktor η0 und in einen Faktor
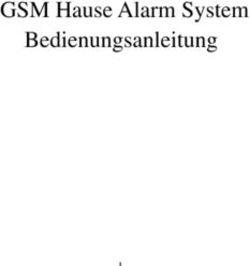
Pa NB2 auf, so lässt sich die akustische Sendeleistung expli- Abb. 3: Für verschiedene Schallwellenpaketlängen wurde die Unsi-
cherheit berechnet und mit realen Messdaten verifiziert. Bei einem
zit im Ausdruck für die Varianz der Temperaturschätzung
SRA von −9,07 dB und bei einer Schallpulslänge von 2 m (entspricht
(18) angeben zu 133 Bragg–Zyklen) kommt es zu einer Abweichung von 0,03 °C. Zu-
sätzlich wurde der Effekt der Amplitudenmodulation, verursacht
12ϑ2 z. B. durch das nichtideale Verhalten des Lautsprechers und Fenste-
var {ϑ}
̂ ≥ . (19)
π 2 η0 Pa NNB4 rung bei der DFT berücksichtigt.
Aus Gleichung (19) sieht man, dass die Varianz der Tem-
peraturschätzung stark (4. Potenz) von der Anzahl der
Bragg–Zyklen NB abhängt. Diese Überlegungen können Optimale Systemauslegung
für einen optimalen Systementwurf in Betracht gezogen
werden. Wie bereits erwähnt können die Beziehungen für die Feh-
Referenzmessungen mit einem Thermoelement be- lergrenzen für eine optimale Systemauslegung herangezo-
stätigen die Erwartungstreue des Schätzers, soweit dies gen werden. Somit kann bereits vor dem konkreten Sys-
die Grundgenauigkeit des Thermoelements zulässt (vgl. temaufbau abgeklärt werden, ob mit den ausgewählten
auch Abschnitt 5). Zur Verifikation der CR–Schranke Komponenten die Messanforderungen hinsichtlich gefor-
wurden Temperaturmessungen (500 Messreihen) durch- derter Messunsicherheit erreicht werden kann. Da eine der
geführt und daraus die Standardabweichung berech- zu erwartenden Temperatur entsprechende Schallwellen-
net. Die vorhergesagten Varianzen werden dabei eben- länge emittiert werden muss und Hochtöner einen stark
falls auf eine Standardabweichung umgerechnet. Eine schwankenden Frequenzgang aufweisen, muss dieser mit
genaue Beschreibung des Messablaufes wird im nächs- einbezogen werden.
ten Abschnitt gegeben. Die Messungen wurden in ei- In Abbildung 4 ist die zu erwartende Standardabwei-
nem Labor bei einer Temperatur von ≈ 23 °C durchge- chung der Temperaturschätzung unter Einbeziehung des
führt und bei einem Messabstand von R = 5 m ausge- Frequenzganges des Hochtöners Ground Zero GZCT 0500X
wertet. Abbildung 3 zeigt für verschiedene Schallpuls- [22] dargestellt. Die Berechnung wurde für einen 2 m lan-
längen die ermittelte Standardabweichung der Tempera- gen Schallpuls durchgeführt. Eine höhere Schallfrequenz
turschätzung im Vergleich zu den vorhergesagten Wer- fa bedeutet eine kleinere Schallwellenlänge λa und so-
ten, welche mit (19) berechnet werden können. Es ist mit mehr auswertbare Bragg–Zyklen in diesem 2 m langen
gut zu erkennen, dass mit größer werdender Schallpuls- Schallpuls. Allerdings ist in der Abbildung 4 ersichtlich,
länge, also mehr Bragg–Zyklen, die Unsicherheit bei der dass die Standardabweichung der Temperaturschätzung
Temperaturmessung verringert wird. Bei einem SRA von mit zunehmender Schallfrequenz nicht kontinuierlich ab-
−9,07 dB beträgt die vorhergesagte Standardabweichung nimmt. Das ist auf den Frequenzgang des Hochtöners zu-
0,21 °C (−6,69 dB bei 1 °C Referenzwert) und die aus den rückzuführen, da dieser lokale Maxima des Schalldruck-
gemessenen Temperaturen berechnete Standardabwei- pegels aufweist. Bei etwa 13,5 kHz beträgt die Standardab-
chung 0,24 °C (−6,19 dB). Das bedeutet eine Abweichung weichung 0,19 °C. Messungen bei dieser im Hörbereich lie-
von 0,03 °C. genden Frequenz wurden bewusst vermieden.D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung | 185 Abb. 4: Diese Abbildung zeigt die Standardabweichung der Tempe- raturschätzung wenn der Frequenzgang des Hochtonlautsprechers Ground Zero GZCT 0500X [22] in die Berechnung der CR–Schranke mit einbezogen wird. Bei etwa 13,5 kHz beträgt die Standardabwei- chung 0,19 °C. Diese Darstellung kann nun als Werkzeug zum Sys- tementwurf direkt herangezogen werden. Das heißt, die optimale Sendefrequenz kann direkt abgelesen werden. 5 Messergebnis Abb. 5: Schematische Darstellung des Messablaufes. Synchron zum Aussenden der Schallpulse wird mit einem Doppler-Radar konti- Messablauf nuierlich gemessen. Aus dem gemittelten Radar-Signal wird eine Spektralanalyse durchgeführt um die Information der Temperatur zu Eine schematische Darstellung des Messablaufes ist in Ab- erhalten. bildung 5 dargestellt. Zur Verbesserung des SRA werden die Signale von M mit einem typischen M = 200 Messun- gen zunächst kohärent gemittelt und dann ausgewertet. Zu diesem Zweck müssen die Schallpulse immer zu vorde- zeiten bestimmt. Für Details sei auf [9] verwiesen. Mittels finierten Zeitpunkten abgestrahlt werden. Dieser Vorgang der Fast-Fourier Transformation wird aus dem Signal des wird über einen Trigger gestartet, der immer nach der Zeit- betrachteten Datenfensters eine Spektralanalyse durchge- spanne TPa gesetzt wird. Zeitgleich zum Aussenden der führt. Die dadurch bestimmte Dopplerfrequenz ist pro- Schallpulse wird mit dem Doppler-Radar kontinuierlich portional zur lokalen Ausbreitungsgeschwindigkeit des gemessen, das Basisbandsignal analog–digital umgesetzt Schallpulses und somit zur lokalen Temperatur des Gases. und in einem Datenvektor abgespeichert. Zu jedem Zeit- punkt TPa wird eine Messsequenz ausgelöst. Je nach not- wendigem SRA und maximal tolerierbarer Messdauer wer- Messung eines Temperaturprofiles den M Messungen kohärent gemittelt (vgl. Abb. 5, gemit- telte Daten). Dieser Datensatz enthält die Information der Nur bei einer optimal eingehaltenen Bragg–Bedingung Ausbreitungsgeschwindigkeit des Schallpulses entlang kommt es zu einer effizienten Rückstreuung und somit zu des Messabstandes. Je nachdem, an welchem Ort s mit einem bestmöglich detektierbaren Signal. Da die Schall- R ≤ s < R + λa NB man die Geschwindigkeit des Schallpul- geschwindigkeit von der Temperatur abhängig ist (1) kann ses bestimmen möchte, muss ein entsprechendes Daten- nur ein eingeschränkter Temperaturbereich von einer Fre- fenster betrachtet werden (siehe Abb. 5, Datenfenster). Die quenzkombination (Radar und Schall) abgedeckt werden. selbst wieder vom Verlauf der örtlichen Schallgeschwin- Für die Messung eines Temperaturprofiles müssen an ver- digkeit zwischen Phasenzentrum und gewünschtem Mess- schiedene Temperaturen angepasste Schallfrequenzen ort abhängige Position des Schallpulses wird durch Auf- hintereinander ausgesendet werden. Bei diesem soge- integration der schallgeschwindigkeitsgewichteten Lauf- nannten Mehrfrequenzverfahren muss der Abstand zwi-
186 | D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung Abb. 6: Zur Messung eines Temperaturprofils wurde das Messsys- tem in einem Innenraum platziert und darauf geachtet, dass die Messachse bei offenem Fenster nach außen weist. ϑ1 beschreibt die Innenraumtemperatur und ϑ2 die Temperatur im Außenbereich. Abb. 7: Das RASS wurde etwa 2,3 m vor dem Fenster positioniert. Obwohl das Fenster erst kurz vor der Messung geöffnet wurde und schen den Frequenzen so gewählt werden, dass keine Lü- die Messzeit nur 4 s betrug ist bereits ein Temperaturdrift entlang cken im Temperaturmessbereich entstehen, aber trotzdem der Messachse erkennbar [14]. die Effizienz der Rückstreuung möglichst hoch bleibt. Zur Messung eines Temperaturprofiles wurde das Sys- tem mittig in einem Laborraum positioniert und der Mess- kopf so ausgerichtet, dass die Messachse bei offenem Fens- niert war. Trotz geringer Messzeit kam es bereits zu einem ter nach außen weist. Eine genaue Beschreibung des Mess- Temperaturdrift entlang des Messpfads. kopfes wurde von den Autoren in [14] vorgestellt. In der Abbildung 6 ist beispielhaft der Messaufbau mit den unter- schiedlichen Temperaturen ϑ1 und ϑ2 dargestellt. Zum Zeit- 6 Zusammenfassung punkt der Messung (27. März 2018) betrug die Außentem- peratur ϑ2 = 5 °C und die Innenraumtemperatur ϑ1 = 27 °C, Mit dem RASS können berührungslos Temperaturen und gemessen mit einem Pt–100 Temperaturfühler (Grenzab- Strömungsgeschwindigkeiten von Gasen gemessen wer- weichung ±0,1 °C). Damit es zu keinem vorzeitigen Tem- den. Bei industriellen Anwendungen ist es wichtig die peraturaustausch kommt, wurde das Fenster erst kurz vor Messunsicherheit eines Systems zu kennen. Zu diesem der Messung geöffnet. Für 10 °C und 24 °C wurden ange- Zweck wurde in diesem Artikel die CR–Schranke berech- passte Schallfrequenzen (f1 = 22,502 kHz, f2 = 23,052 kHz) net, die eine Grenze für die erreichbare Schätzgenauig- ausgesendet. Wie in [3] zu sehen, kann damit ein Tempera- keit angibt. Weiters wurde gezeigt, dass mit einem Mehr- turbereich von jeweils ±8 °C abgedeckt und trotzdem noch frequenzverfahren auch Temperaturprofile gemessen wer- das Signal detektiert werden. den können. Für diese Messung wurden NB = 33 Bragg–Zyklen ge- Da die Temperatur und die Strömungsgeschwindig- wählt, somit beträgt die Schallpulslänge 0,5 m. Abbil- keit in Ausbreitungsrichtung der elektromagnetischen dung 7 zeigt das ausgewertete Temperaturprofil, wobei für Welle nicht unabhängig voneinander geschätzt werden R alle 20 cm Temperaturwerte ausgewertet wurden. Auf können, ist eine gleichzeitige Bestimmung dieser Parame- der Abszisse ist der Abstand zwischen dem Messkopf und ter mit nur einem System nicht möglich und stellt eine Li- dem Schallpulsanfang dargestellt. Das heißt bei einem Ab- mitierung dar. Abhilfe würde eine entsprechende Anord- stand von z. B. 0,5 m befindet sich der Schallpuls zwischen nung von mehreren Systemen schaffen. 0,5 m und 1 m von den Quellen entfernt. Damit ein aus- sagekräftiges Ergebnis erzielt werden kann, wurden M = Danksagung: Besonderer Dank für viele wissenschaftli- 200 Messungen gemittelt. Die gesamte Messzeit betrug 4 s. che und fachliche Diskussionen geht an Frau Vera Gangl- Somit konnte gewährleistet werden, dass der Wärmeaus- berger sowie die Herren Stefan Schuster, Stefan Scheibl- tausch nur im geringen Maße stattfand. Es ist gut zu erken- hofer, Dominik Zankl und Johann Reisinger ebenfalls von nen, dass der Messkopf etwa 2,3 m vor dem Fenster positio- der voestalpine Stahl GmbH.
D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung | 187 Finanzierung: Die Autoren bedanken sich ausdrücklich 15. B. B. Balsley, K. S. Gage, The MST radar technique: Potential für die finanzielle Unterstützung durch die Österreichi- for middle atmospheric studies, Pure and Applied Geophysics, Vol. 118, 452–493, 1980. schen Forschungsförderungsgesellschaft (FFG) unter der 16. M. Daas, R. Knöchel, Compact Sounding System using Projektnummer 861570 sowie bei der voestalpine Stahl Microwaves and Ultrasound, In: Microwave Symposium Digest, GmbH. Long Beach, USA, S. 257–260, 1989. 17. M. Daas, R. Knöchel, Microwave-Acoustic Measurement System for Remote Temperature Profiling in Closed Envirenments, In: Microwave Conference, Helsinki, Finland, S. 1225–1230, 1992. Literatur 18. M. Weiß, R. Knöchel, A Monostatic Radio-Acoustic Sounding System Used as an Indoor Remote Temperature Profiler, IEEE 1. Stuart Bradley, Atmospheric Acoustic Remote Sensing, CRC Transaction on Instrumentation and Measurement, Vol. 50, Press, 2008. No. 5, 2001. 2. M. Weiß, R. Knöchel, Monostatic Radio-Acoustic Sounding 19. Benjamin Moussa Daas, Die elektromagnetisch-akustische System, In: Geoscience and Remote Sensing Symposium, Wechselwirkung und ihre Anwendung zur berührungslosen Hamburg, Germany, S. 29–31, 2001. Entfernungs- und Temperaturmessung in geschlossenen 3. D. Exel, S. Schuster, B. Zagar, S. Scheiblhofer, D. Zankl, Räumen, Shaker Verlag, Aachen, 1996. ISBN 3-8265-2148-X. V. Ganglberger, J. Reisinger, Key Design Elements of a 20. M. I. Skolnik, Introduction to Radar Systems, McGraw-Hill Radio-Acoustic-Sounding System for Industrial Applications, Education, 2003. In: Sensoren und Messsysteme, Deutschland, Nürnberg, 2019. 21. F. Gustrau, Hochfrequenztechnik, Grundlagen der mobilen 4. R. Lerch, G. Sessler, D. Wolf, Technische Akustik: Grundlagen Kommunikation, Hanser Verlag, 2013. und Anwendungen, Springer, 2009. 22. Ground Zero GZCT-0500X, Datenblatt: https://www.ground- 5. F. Bernhard, Handbuch der Technischen Temperaturmessung, zero-audio.com/de/produkt/gzct-0500x/. 2nd ed. Springer, 2014. 23. E. Schrüfer, L. Reindl, B. Zagar, Elektrische Messtechnik, Hanser 6. C. Feilmayr, S. Schuster, G. Lengauer, L. Stegfellner, B. Lackner, Verlag, 2018. E. Schuster, D. Zankl, A. Stelzer, R. Feger, R. Winkel, Burden 24. S. M. Kay, Fundamentals of Statistical Signal Processing — Surface Scanning via Massive MIMO Imaging Radar in an Estimation Theory, Prentice Hall, Englewood Cliffs, Upper Ironmaking Blast Furnace, In: METEC, 2015. Saddle River, NJ, 1993. 7. C. Feilmayr, S. Schuster, V. Ganglberger, B. Lackner, D. Zankl, L. 25. S. Schuster, D. Exel, B. Zagar, S. Scheiblhofer, D. Zankl, V. Stegfellner, Innovative Tools for Process Optimization – Burden Ganglberger, J. Reisinger, Noise Variance and Signal-to-Noise Surface Scanning via Beamforming Radar and Measurement of Ratio Estimation from Spectral Data, In: IEEE International the Top Gas Temperature Distribution, In: 7th European Coke Instrumentation and Measurement Technology, Neuseeland, and Ironmaking Congress, ECIC, 2016. Auckland, 2019. 8. J.A. Saffold, F. Williamson, K. Ahuja, L. Stein, M. Muller, 26. P. Stoica and T. L. Marzetta, Parameter estimation problems Radar-acoustic Interaction for IFF Applications, In: Radar with singular information matrices, IEEE Trans. Signal Conference, Waltham USA, S. 198–202, 1999. Processing, Vol. 49, No. 1, pp. 87–90, Jan 2001. 9. D. Exel, S. Schuster, K. Thaller, B. Zagar, D. Zankl, S. Scheiblhofer, V. Ganglberger, J. Reisinger, Radio–Acoustic–Sounding System — berührungslose u. abstandsaufgelöste akustische Temperaturmessung im industriellen Umfeld, In: Elektrotechnik und Informationstechnik, S. 389–395, 2018. 10. J. M. Marshall, A. M. Peterson, A. A. Barnes, Combined radar-acoustic sounding system, Applied Optics, Vol. 11, No. 1, Autoreninformationen 108–112, 1972. 11. S. F. Clifford, T. I. Wang, The range limitation on radar-acoustic Dominik Exel sounding system (RASS) due to atmospheric refractive Johannes Kepler Universität Linz, Institut turbulence, IEEE Transactions on Antennas and Propagation, für Elektrische Messtechnik, Vol. 25, 319–326, 1977. Altenbergerstraße 69, 4040 Linz, Austria 12. A. M. Angevine, Radio Acoustic Sounding System (RASS) dominik.exel@jku.at Application and Limitations, In: Geoscience and Remote Sensing Symposium, Honolulu, USA, S. 1180–1182, 2000. 13. J. R. Kutia, W. Xu, A Portable Radio-Acoustic Sounding System for Temperature Profiling Within the Boundary Layer, In: Industrial Electronics Society, IECON, S. 2308–2313, 2014. Dr. Dominik Exel, M. Sc. studierte Automatisierungstechnik an der 14. D. Exel, B. Zagar, S. Schuster, S. Scheiblhofer, D. Fachhochschule Wels und war von 2016–2020 am Institut für Elek- Zankl, V. Ganglberger, J. Reisinger, Ein kompaktes trische Messtechnik an der Johannes Kepler Universität in Linz be- Radio-Acoustic -Sounding System zur Temperatur und schäftigt. Im Rahmen seiner Dissertation beschäftigte er sich mit Strömungsgeschwindigkeitsmessung, In: 6. Tagung Innovation der berührungslosen Temperaturmessung. Seine Interessen liegen Messtechnik, Österreich, Linz, 2019. im Bereich der Signalverarbeitung und Sensorsysteme.
188 | D. Exel und B. Zagar, Systemdesign und Fehlerabschätzung Bernhard Zagar Johannes Kepler Universität Linz, Institut für Elektrische Messtechnik, Altenbergerstraße 69, 4040 Linz, Austria bernhard.zagar@jku.at Univ.-Prof. Dipl.-Ing. Dr. Bernhard G. Zagar leitet das Institut für Elektrische Messtechnik an der Johannes Kepler Universität Linz. Seine Interessen sind im Fachgebiet Messtechnik weit gestreut und erstrecken sich vom Sensordesign bis hin zur Signalverarbeitung. Besondere Schwerpunkte liegen im Bereich der optischen Mess- technik, der Bildverarbeitung und der Magnettomographie.
Sie können auch lesen