Robotik Sensible Helfer auf der Erde und im All - l - Space2School
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Robotik
Sensible Helfer
auf der Erde
und im All
xisteil:
Mit Pra ines
Bau e rms
ra
Robote
Lehrmaterial
Sekundarstufe I
Bildnachweise 49 (Bild 4), 67 (unten): AdobeStock; 60 (oben rechts): Audi; 46 (unten Bild 2): Christian Ulrich; 64 (unten): David Drill; 58: DFKI GmbH / Jakob Weber; 3, 4 (Mitte rechts), 38, 39, 42 (Bild 1), 45, 46 (unten Bild 4), 51 (oben), 53 , 56 (oben), 59, 61 (oben), 61 (Mitte Bild 2), 65, 66 (rechts), 67 (oben), 70 (oben), 70 (Mitte rechts), 71, 72: DLR; 62 (oben links): DLR / Jordi Artigas; 76 (oben): DLR / DesignData; 46 (oben): DLR / T. Bourry; 4 (Mitte links), 26, 45: DLR / T. Bourry / ESA; 32: ESA; 5 (rechts), 28 (oben): ESA / NASA; 61 (Mitte Bild 2): fotolia; 76 (unten Mitte): G.RAU / MartinGlaunerBildkonzepte; 54: GEOlino; 61 (unten): HAVEit.; 81 (Mitte Bild 4): hs-international; 79: Husquarna; 5 (links), 34, 36, 40, 42 (Bild 2), 46 (unten Bild 3), 56 (unten rechts), 61 (Mitte Bild 3), 61 (Mitte Bild 4): Istock; 24, 28 (unten), 43 (oben), 44, 62 (unten), 73, 74, 75, 77, 78, 80, 82, 83 (Mitte), 83 (unten): Stefan Kruse; 15 (unten), 48 (unten): KUKA AG; 60 (unten rechts): Medical Futurist; 37, 48 (oben), 69: NASA; 27: noonee; 67 (Mitte): PAL Robotics S.L.; 16, 29, 30 (unten Bild 1), 42 (Bild 3), 42 (Bild 4), 43 (unten Bild 1), 43 (unten Bild 1), 49 (Bild 1), 49 (Bild 2), 49 (Bild 3), 52, 76 (unten rechts), 81 (Mitte Bild 1), 83 (oben): Pixabay; 68 (unten): Raymarine; 57 (unten): Roskosmos; 76 (unten links): Sebastian May / kunststoffe.de; 4 (unten), 30 (oben), 43 (unten Bild 3), 56 (unten links), 81 (oben): Shutterstock; 66 (links): Thüringer Museum für Elektrotechnik; 15 (oben), 48 (Mitte): Velleman; 46 (unten Bild 1), 60 (oben links), 60 (oben Mitte), 60 (unten links), 68 (oben), 70 (Mitte links), 81 (Mitte Bild 3), 81 (unten Bild 4): Wikimedia; 62 (oben rechts): Wikimedia / NASA; 81 (unten Bild 3): Petra Wöhner; 57 (oben): Daniel Zimbelius Trotz unserer Bemühungen ist es uns nicht in jedem Fall gelungen, den Rechteinhaber um Abdruckerlaubnis zu bitten oder zu ermitteln. Sollten Sie Rechte an einem der abgedruckten Bilder geltend machen können, bitten wir Sie, mit uns Kontakt aufzunehmen (p.woehner@klett-mint.de). Impressum 1. Auflage Dezember 2018 Das Werk und seine Teile sind urheberrechtlich geschützt. Jede Nutzung in anderen als den gesetzlich zugelassenen Fällen bedarf der vorherigen schriftlichen Einwilligung des Verlages. Hinweis § 52 a UrhG: Weder das Werk, noch seine Teile dürfen ohne eine solche Einwilligung eingescannt und in ein Netzwerk eingestellt werden. Dies gilt auch für Intranets von Schulen und sonstigen Bildungseinrichtungen. Fotomechanische oder andere Wiedergabeverfahren nur mit Genehmigung des Verlages. Auf verschiedenen Seiten dieses Heftes befinden sich Verweise (Links) auf Internetadressen. Haftungsnotiz: Trotz sorgfältiger inhaltlicher Kontrolle wird die Haftung für die Inhalte der externen Seiten ausgeschlossen. Für den Inhalt dieser externen Seiten sind ausschließlich die Betreiber verantwortlich. Sollten Sie daher auf kostenpflichtige, illegale oder anstößige Seiten treffen, so bedauern wir dies ausdrücklich und bitten Sie, uns umgehend per E-Mail (p.woehner@klett-mint.de) davon in Kenntnis zu setzen, damit bei Nachdruck der Nachweis gelöscht wird. Herausgegeben vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) und Klett MINT GmbH. © Deutsches Zentrum für Luft- und Raumfahrt (DLR) Bonn und Klett MINT GmbH, Stuttgart Autoren: Dr. Stefan Kruse, Schwäbisch Gmünd; Daniel Zimbelius, Reichenbach Redaktion: Hanne Lier, Medienwerk Lier, Stuttgart Beratung: Alexandra Herzog, Thilo Kaupisch, DLR Raumfahrtmanagement, Bonn Projektkoordination und Herstellung: Petra Wöhner, Klett MINT Gestaltung: Bettina Herrmann, Stuttgart Umschlag: CD Werbeagentur GmbH, Troisdorf Illustrationen: Grafische Produktionen Jürgen Neumann, Rimpar Druck: M&E Druckhaus, Belm Zugunsten einer leichteren Lesbarkeit wird in diesem Heft nicht immer ausdrücklich auch die weibliche Form genannt. Selbstverständlich sind aber immer weibliche und männliche Personen gemeint. Wir bitten für dieses Vorgehen um Ihr Verständnis.

Dr. Stefan Kruse Daniel Zimbelius Robotertechnik Physik – Technik – Mathematik – Informatik Arbeitsblätter und Lehrerinformationen für Sek I (Klassen 8 bis 10)

VORWORT 3
VORWORT
Als mit Neil Armstrong 1969 der erste Mensch seinen Fuß auf den Die Roboter treten ihren Siegeszug allerdings lautlos an. Die Folge:
Mond setzte, war ein historischer Sprint der Wissenschaft ins Ziel Auch die öffentliche Diskussion und die Motivation für kluge Kopfe,
gelangt. Technologien, die bis dahin nur wenige Forscher kannten auf diesem Feld mitzuwirken, sind schwächer als damals. Dabei
und die nur für einen überschaubaren Kreis überhaupt vorstellbar wäre es notwendig, dass möglichst viele Menschen die Grund-
waren, hatten einen Erfolg errungen, den niemand mehr übersehen lagen begreifen, mitarbeiten und Keimzellen für weitere Ideen der
konnte. Robotertechnik schaffen.
Das Echo der Mondlandung war auf der Erde der Siegeszug von
Diesen Anspruch hat dieses Arbeits- und Informationsheft, das in
Weltraumtechnologie in den Alltag. Ob Regelungstechnik in Haus-
Kooperation mit Pädagogen entstanden ist. Sie arbeiten täglich mit
haltsgeräten, digitale Datenverarbeitung oder der Klettverschluss –
Jugendlichen und wissen, wie man erklärt und nachhaltig Inter-
die Ideen der Raumfahrt haben unseren Alltag nachhaltig verändert.
esse weckt. Das Buch ist ganz bewusst kein Lexikon der großen
Die Aufbruchsstimmung, die im Anschluss an die Mondlandung in
Robotererfolge und auch keine Aneinanderreihung bloßer Fakten.
Forschung, Bildung und öffentlichen Debatten aufkam, wäre aber
Stattdessen soll es Lernenden und Interessierten den grundlegenden
ohne die emotionale Seite, die Faszination des Weltalls und die
Zugang zur Robotertechnik ermöglichen – einfach, verständlich und
Vorbildwirkung der Helden im All, unmöglich gewesen. In Hoch-
faszinierend. Für Lehrkräfte bietet es Anregungen, mit einfachen
schulen, Schulen und sogar im Kindergarten rückten Wissenschaft
Mitteln die Grundlagen der Robotertechnik aus Physik, Mathematik
und Technik in den Fokus – es galt, mitzureden und die Zukunft
und Elektrotechnik zu vermitteln.
mitzugestalten.
Als Raumfahrtmanagement im Deutschen Zentrum für Luft- und
Heute stehen wir erneut vor einer technischen Revolution, die aus
Raumfahrt e. V. ist es uns wichtig, ein Bewusstsein zu schaffen für
dem Weltall auf die Erde schwappt: Roboter – autonome, häufig
den Nutzen und die Bedeutung von Raumfahrt in unserem Alltag.
selbst entscheidende Geräte – werden unseren Alltag bestimmen.
Robotische Systeme, die für die Raumfahrt entwickelt werden,
Egal ob fahrerlose Autos, selbstregulierende Energiesysteme oder
leisten auch wichtige Beiträge für uns auf der Erde. Entdecken Sie
elektronische „Pflegekräfte“ – viele Experten sagen voraus: Das
mit Ihrer Schulklasse, wie Roboter funktionieren und welchen Ein-
21. Jahrhundert wird jenes der Roboter.
fluss Sie auf unser Leben haben – im Weltall und auf der Erde.
Wieder ist die Raumfahrt Vorreiter, denn ohne Robotersysteme
wären Missionen ins All schon seit Jahrzehnten undenkbar. So
werden immer neue Technologien entwickelt, wie z. B. Cimon – ein
autonom handelnder Astronauten-Assistent. Dieser Roboter steht
dem ESA-Astronaut Alexander Gerst bei seiner Mission „horizions“
auf der Internationalen Raumstation (ISS) zur Seite. Ausgestattet
mit künstlicher Intelligenz unterstützt dieses „fliegende Gehirn“ die
Astronauten bei der Arbeit und kann sogar mit ihnen agieren. Viele
Systeme wie diese, die für den Einsatz im Weltall entwickelt wurden,
finden in terrestrischen Robotern ihre Anwendung.
Dr. Franziska Zeitler Alexandra Herzog Thilo Kaupisch
DLR Raumfahrtmanagement DLR Raumfahrtmanagement DLR Raumfahrtmanagement
Abteilungsleitung Innovation & Abteilung Innovation & Neue Märkte Abteilung Technik für
Neue Märkte Raumfahrt-Systeme und Robotik
Koordinatorin der Schul- und
Wissenschaftliche Leitung der Jugendprojekte Wissenschaftlicher Mitarbeiter
Schul- und Jugendprojekte
4
INHALTSVERZEICHNIS
Informationen für Lehrkräfte und Lösungen zu den Arbeitsblättern
Modul 1: Robotik-Systeme registrieren ihre Umwelt ..................................................................... 7
Modul 2: Robotik-Systeme bewegen sich ................................................................................. 10
Modul 3: Robotik-Systeme handeln selbstständig ...................................................................... 14
Modul 4: Robotik-Systeme erfüllen einen bestimmten Zweck ...................................................... 18
Modul 5: Konstruktion und Bau eines Greifarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
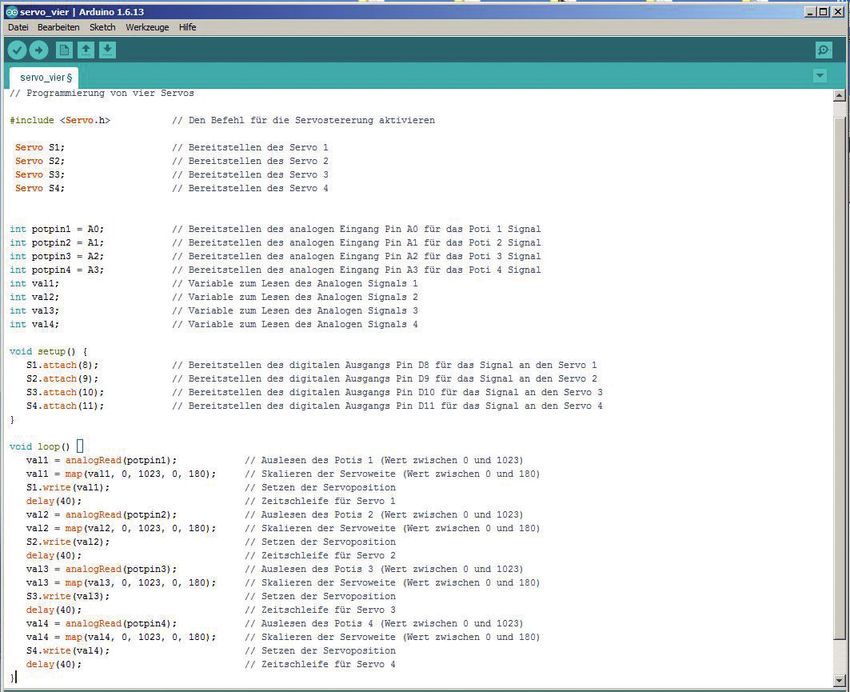
INHALTSVERZEICHNIS 5 Arbeitsblätter Modul 1: Robotik-Systeme registrieren ihre Umwelt 1 Menschen und Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 2 Ohne Elektrotechnik keine Roboter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 3 Steuerungs- und Regelungstechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 4 Sensoren erfassen Messwerte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 Modul 2: Robotik-Systeme bewegen sich 5 Ohne Mathematik geht nichts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 6 Die Natur und ihre Gesetze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 7 Bewegungen und Freiheitsgrade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 8 Aktoren wandeln Informationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 9 Mobile Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 Modul 3: Robotik-Systeme handeln selbstständig 10 Grundlagen der Maschinen- und Robotertechnik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 11 Funktionsweise von Mikrocontrollern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 12 Hohe Frequenzen für Roboter – die HF-Technik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 13 Fernsteuerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 14 Autonome Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59 Modul 4: Robotik-Systeme erfüllen einen bestimmten Zweck 15 Mensch-Maschine-Schnittstellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61 16 Roboter als Helfer im Alltag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64 17 Roboter in extremen Situationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67 18 Raumfahrt – heute und in der Zukunft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 Modul 5: Konstruktion und Bau eines Greifarms 19 Kreatives Konstruieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72 20 Konstruktion und Produktion der Greifzange . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76 21 Konstruktion des mechanischen Gestellarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79 22 Planung und Programmierung der Robotersteuerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81 23 Verdrahtung und Inbetriebnahme des Greifarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6
LEHRERSEITEN
Informationen für Lehrkräfte und Lösungen
zu den Arbeitsblättern
Modul 1:
Robotik-Systeme registrieren ihre Umwelt ................................ 7
Modul 2:
Robotik-Systeme bewegen sich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Modul 3:
Robotik-Systeme handeln selbstständig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Modul 4:
Robotik-Systeme erfüllen einen bestimmten Zweck . . . . . . . . . . . . . . 18
Modul 5:
Konstruktion und Bau eines Greifarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Die Arbeitsblätter finden Sie für alle Module ab Seite 26.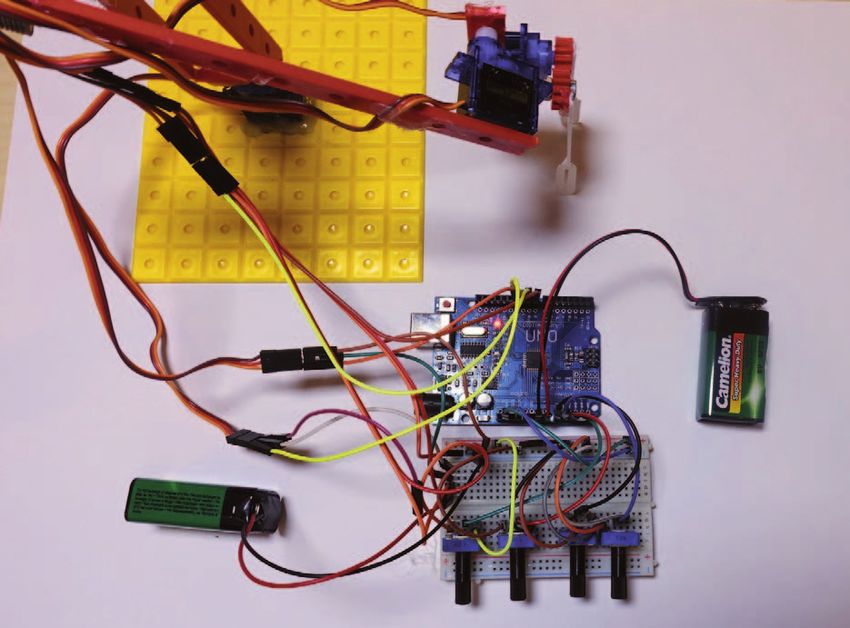
MODUL 1: ROBOTIK-SYSTEME REGISTRIEREN IHRE UMWELT 7
Modul 1 Robotik-Systeme registrieren ihre Umwelt
Einführung in das Thema
Das vorliegende Arbeitsheft ist in fünf Module aufgeteilt:
– Robotik-Systeme registrieren ihre Umwelt
– Robotik-Systeme bewegen sich
– Robotik-Systeme handeln selbstständig
– Robotik-Systeme erfüllen einen bestimmten Zweck
Infos zu den Arbeitsblättern
– Konstruktion und Bau eines Greifarms
Arbeitsblatt 1 liefert Informationen und Denk-
Damit werden bereits durch die Gliederung des Heftes in den anstöße zur historischen Entwicklung der Zusammen-
vier ersten Modulen die grundlegenden Eigenschaften von Ro- arbeit von Menschen und Maschinen bis hin zur vierten
botik-Systemen verdeutlicht. Im fünften Modul werden die theo- industriellen Revolution.
retischen Inhalte umgesetzt in die praktische Durchdringung des
Arbeitsblatt 2 behandelt Grundlagen der Elektro- und
Themas. Die Schülerinnen und Schüler (SuS) werden so Schritt
Informationstechnik und die grundlegenden Bauteile der Elektro-
für Schritt herangeführt an moderne, hochkomplexe, auto-
technik, welche im fünften Modul bei der Konstruktion eines
nome Systeme, die als „Dienstleister“ für den Menschen von
Roboterarms benötigt werden.
Menschen entwickelt werden: als Service-, Arbeits-, Rettungs-
Roboter auf der Erde oder im Weltraum. Bei Bedarf können die Arbeitsblatt 3 differenziert zwischen den Begriffen der
Module – je nach Unterrichtssituation – auch einzeln behandelt Steuerungs- und Regelungstechnik.
werden.
Arbeitsblatt 4 zeigt auf, wie Robotik-Systeme ihre Umwelt
Modul 1 „Robotik-Systeme registrieren ihre Umwelt“ registrieren, was die notwendige Basis für das Verständnis
schafft Grundlagen für ein frühes Verständnis von Roboter- moderner Sensorsysteme bildet.
Systemen und deren Erfassungsmöglichkeiten ihrer jeweiligen
Umgebung. Dafür werden Kompetenzen im Bereich der Elektro-
technik und Elektronik, der Steuerungs- und Regelungstechnik
sowie der Sensorik vermittelt.
Methodische Vorgehensweise
Die Arbeitsblätter in Modul 1 bilden die Grundlage für die folgen-
den Module und sollten, abgestimmt auf das Vorwissen und den
geplanten Unterrichtsverlauf, möglichst nacheinander behandelt
werden. Je nach Vorwissen der Schülerinnen und Schüler (SuS)
kann dies unterschiedlich viel Zeit in Anspruch nehmen. Bei der
Umsetzung empfehlen sich die Sozialformen Einzel- sowie Partner-
arbeit. An ausgewiesenen Stellen wird eine Gruppendiskussion
vorgeschlagen. Bei der Erarbeitung der Bauteile der Elektrotechnik
hat sich eine kurze Präsentation durch die SuS bewährt.
MEDIEN
Für die Darstellung der elektro-
technischen Bauteile empfiehlt sich der
Zugriff auf ein geeignetes Simulations-
programm. In diesem Heft wurde bei-
spielhaft mit der Software Yenka® gear-
beitet. Sie kann unter www.yenka.com
kostenfrei als Heimlizenz geladen
werden (freie Nutzung im Heimbereich
ab 15:00 Uhr, auch Schullizenzen in
Kombination mit anderen Fächern des
MINT-Bereichs sind möglich).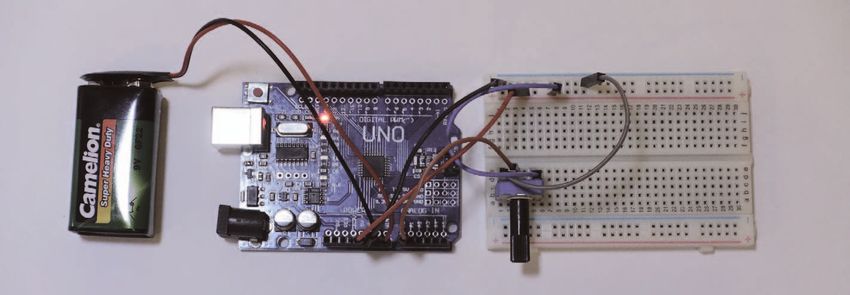
8 LÖSUNGEN
1 Menschen und Maschinen
1. Werkzeug. Sinn und Zweck: Die Funktionen des eigenen bei denen Mitarbeiter in ungünstigen Positionen oder mit schweren
Körpers können dadurch erweitert werden. Werkzeuge ergänzen Maschinen arbeiten müssen.
und verbessern die körperlichen Fähigkeiten. Beispiele: Hammer,
Säge, Lineal, Pflug … 4. Robotik-Ingenieur: Roboter werden zunehmend tiefer in alle
Maschine. Sinn und Zweck: Entlastung von schwieriger, gefähr- Bereiche des Arbeitslebens eindringen, z. B. in Supermärkten, an
licher oder immer wiederkehrender körperlicher und geistiger Rezeptionen oder in der Medizin. Robotik-Ingenieure müssen diese
Arbeit. Beispiele: Bohrmaschine, Computer, Motor … sensorgesteuerten, interaktiven Systeme entwickeln und program-
mieren. Kenntnisse u. a. in Maschinenbau, E-Technik, Steuerungs-
2. a) menschliche Handlungen: flexibel und schnell an veränderte und Automatisierungstechnik sind nötig.
Situationen anpassbar, schnell sind feine und komplexe Handgriffe Luft- und Raumfahrttechnik: In Luft- und Raumfahrtzentren
umsetzbar, Einbringen von individuellen und emotionalen Aspekten arbeiten Ingenieure an der Entwicklung und Verbesserung von
ist möglich, Entwicklung von Prozesswissen, Erfahrungen rasch Flugzeugen, Satelliten und Weltraumfahrzeugen. Diese Systeme
umsetzbar … werden zunehmend autonomer agieren. Kenntnisse in E-Technik,
maschinelle Handlungen: sehr präzise, immer gleiche Qualität, Maschinenbau, Werkstoffkunde, Messtechnik sowie allgemein in
ermöglichen hohe Stückzahlen, schwere, gefährliche und monotone Physik und Mathematik werden dafür benötigt.
Arbeiten ohne menschlichen Einsatz, Arbeit rund um die Uhr mög- eSports-Management: Die Computerspiele-Branche entwickelt
lich, keine Ermüdungserscheinungen … sich rasant weiter. So werden z. B. im eSport-Segment (Electronic
b) Mögliche Erkenntnisse: Was nützt die Massenproduktion von Sports) bereits viele Spiele als Live-Events vor tausenden Zuschauern
Gütern, wenn es dafür keine oder nicht genügend Käufer /Käufe- in Fußballstadien übertragen. Projektmanager im eSports-Bereich
rinnen gibt? Was passiert mit den Arbeitenden, die in den Fabriken organisieren eine Vielzahl von vernetzten Events und Aktivitäten.
überflüssig werden? Welche Auswirkungen haben die Entwicklun- Softwareentwicklung: Um immer mehr Lebensbereiche in die
gen von Industrie 4.0 auf die arbeitende Bevölkerung? digitale Welt zu integrieren, benötigt der stark wachsende Sektor
Softwareentwickler. Diese konzipieren, entwickeln oder program-
3. Technische Hilfsmittel, sogenannte Exoskelette, erleichtern die mieren Software für die unterschiedlichsten Anwendungsbereiche.
Arbeit. Durch den Einsatz eines flexiblen Roboterstuhles oder eines Insbesondere die Digitalisierung von Produkten für virtuelle und
Exoskeletts wird die Ergonomie bei Montagetätigkeiten verbessert, augmented Reality wird immer wichtiger.
2 Ohne Elektrotechnik keine Roboter
1. Eingabe: Schalter, Taster, Wechselschalter, Thermistor, Foto- Glühlampe, Leuchtdiode, Messgerät, Summer, Lautsprecher.
widerstand, Reedkontakt, Mikrofon. Verarbeitung: Elektrolytkon- Sonstige: Spannungsquelle, Batterie, Masse, Sicherung, Leitungen
densator, Diode, Widerstand, regelbarer Widerstand, Kondensator, mit und ohne Verbindung.
Trimmpotenziometer, Transistor, Relais. Ausgabe: Elektromotor, Eine tabellarische Darstellung könnte wie folgt aussehen:
EVA Bauteil Funktion Schaltzeichen
E Schalter schließt beim Betätigen und bleibt geschlossen
E Taster durch Tasten schließt der Schalter, bleibt nicht geschlossen
Abbildungen und Beschreibungen von Schaltzeichen für Elektrik / Elektronik finden Sie in entsprechenden Tabellenbüchern
oder beispielsweise unter https://space2school.de/schaltzeichen
2. a) Betätigt man den Schalter, blitzt die LED kurz auf und ist 4. a) Eine Transistorschaltung besteht aus zwei Stromkreisen: dem
zerstört! Steuer- und dem Arbeitsstromkreis. Steigt im Steuerstromkreis
b) Es fehlt der Schritt der Verarbeitung, d. h. der Reduzierung der zwischen der Basis und dem Emitter die Spannung über 0,7 V,
Spannung vor der LED. In den Stromkreis muss ein Vorwiderstand schaltet der Transistor durch und im Arbeitsstromkreis fließt Strom.
eingebaut werden. Berechnung des Vorwiderstands: Liegen weniger als 0,7 V an, sperrt der Transistor.
Uges = UR + ULED; UR = 6,8 V; ULED = R · I; R = 340 Ω.
3. a) Verdrahtungsplan b) Schaltplan c) Stromlaufplan
+
–MODUL 1: ROBOTIK-SYSTEME REGISTRIEREN IHRE UMWELT 9
3 Steuerungs- und Regelungstechnik
1. (1) Steuerungen (2) Regelungen 3. Steuerung. Vorteile: kostengünstig, von Hand bedienbar,
einfache Schalter und Aktoren. Nachteile: keine Rückmeldung vom
2. a) Steuerungen: Einschalten der Zimmerbeleuchtung, Betätigen System, schlechter Abgleich von Soll- und Ist-Werten.
einer elektrischen Markise, Betätigen der Haustürklingel … Regelung. Vorteile: genauer Abgleich von Soll- und Ist-Werten,
Regelungen: Klimaautomatik in einem Gebäude oder Auto, Hellig- automatisiertes Schalten. Nachteile: meist aufwändige Elektronik
keitsanpassung eines Smartphones, Toilettenspülung, Spannungsre- notwendig, teure Sensoren und Aktoren.
gelung im Netzgerät …
b) In der Reihenfolge von links nach rechts: S – S – R – R – S
4. Tageslicht Widerstände Lampenlicht
R1, RF und Transistor T Lampe
Transistor T
Außentemperatur
5. Widerstands- Raum-
wert temperatur
Transistor Relais Innenraum
Thermistor mit einstellbarem
Widerstand R1
6. 1) Steuerung eines Fahrzeugblinkers; 2) Steuerung einer Klimaanlage; 3) Antriebsregelung des Motors in einem Elektrofahrzeug
4 Sensoren erfassen Messwerte
1. Temperatur, Helligkeit, Schall, Druck, Beschleunigung, Feuchtigkeit, pH-Wert, Ionenkonzentration, elektrisches Potenzial …
2. Eigenschaften Temperatur Helligkeit Schall Druck
Funktionsbezeichnung Wärmesensor optischer Sensor akustischer Sensor Drucksensor
Biologie Haut Auge Ohr Hand und Haut
Technik Thermistor Fotowiderstand Mikrofon Schalter
praktische Anwendung Temperaturüberwachung Einschalten der Beleuch- Sprachsteuerung eines Erfassen der Kraft
in einem Motor tung bei Dunkelheit Roboters eines Greifarms
3. Menschen haben keine Sinnesorgane für Magnetfelder, Radio- 5. einzelne Pixel /
Fotodioden
wellen, Radioaktivität, Ultraschall, Spannung, Strom, Zeit. – Senso-
10011100100...
ren für Magnetfelder oder Induktivitäten heißen Reedkontakt oder
Hallsensor. Sie können bei der Bestimmung der Umdrehungszahl bei
Wellen und Rädern (z. B. zur Erfassung der Position eines Greifarms) Analog-/
eingesetzt werden. Digital- vertikaler
Wandler Schiebespeicher
4. a) Funktionsprinzip (doppelte Linie), Reihenfolge von links
oben in Schreibrichtung nach rechts unten: f – a – e – c – d – b horizontaler
Einsatzbereich (gepunktete Linie), Reihenfolge von links oben in Schiebespeicher
Schreibrichtung nach rechts unten: e – a – c – b – d – f Verstärker
6. Lidar: Überwachung von Bewegungen anderer Fahrzeuge und
Auslösen einer Notbremsfunktion.
Radar: Erkennen und Überwachen von lebenden Personen und
deren Körperbewegungen.10 LÖSUNGEN
Modul 2 Robotik-Systeme bewegen sich
Einführung in das Thema
„Robotik-Systeme bewegen sich“ ermöglicht einen Einblick in Infos zu den Arbeitsblättern
grundlegende Funktionen, Komponenten und Bewegungsmög-
lichkeiten von Robotern. Für den Betrachter wird eine Maschine Der Schwerpunkt des Moduls liegt in der Vermittlung
erst dann zu einem Roboter, wenn sie sich bewegt – möglichst von mechanisch ausgeführten Bewegungen. Dabei
autark und situationsangepasst. Ein sich bewegendes System werden mathematisch-naturwissenschaftliche Grundlagen und
ist jedoch äußerst komplex und technisch herausfordernd. technische Zusammenhänge der Getriebelehre als Basis für die
Grundlagen hierbei sind physikalische Gesetze, verschiedene spätere Konstruktionsaufgabe benötigt.
Bewegungsrichtungen und -möglichkeiten und Einflüsse der
Arbeitsblatt 5 behandelt die Grundlagen der Mathematik, auf der
Umgebung. Viele Komponenten müssen ineinandergreifen, da-
die Steuerung von Bewegungen beruht.
mit ein Roboter sich bewegen kann. Für einfache Bewegungen
reichen einfache Gelenke, die sich mittels Getriebe und Motoren Arbeitsblatt 6 stellt in einer kompakten Wiederholung physika-
steuern lassen; für aufwendigere Bewegungen müssen mehrere lischen Grundlagenwissens Beschleunigung, Gewichtskraft und
Gelenke durch Servos angesteuert werden. Konnten früher stati- Magnetismus im Kontext der Robotertechnik vor.
onäre Roboter oft nur einfache, vorprogrammierte Bewegungs-
In Arbeitsblatt 7 geht es um Freiheitsgrade, Gelenke und
abläufe leisten, baut man heute vollständig autonome Systeme.
Kinematiken.
Arbeitsblatt 8 behandelt Aktoren mit dem Schwerpunkt
Servomotor als Aktor für die Umsetzung von Informationen in
Bewegungen.
Arbeitsblatt 9 führt zum Abschluss dieses Moduls in die Welt sich
bewegender Roboter ein. Es geht vor allem darum, wie sich auto-
nome technische Syteme orientieren.
Methodische Vorgehensweise
Die Arbeitsblätter sind unabhängig voneinander einsetzbar. Ein tiefe-
res Verständnis für die Komplexität der realen Programmierung von
Roboter-Systemen wird erreicht, indem die Grundlagen-Arbeitsblätter 5,
6 und 7 in dieser Reihenfolge im Unterricht bearbeitet werden.
Arbeitsblatt 9 erfordert weniger Vorkenntnisse. In Kombination mit
einer Internetrecherche kann dieses Thema gut auch in Eigenarbeit von
den Schülerinnen und Schülern (SuS) bearbeitet werden.
MEDIEN
Bei der Umsetzung der mathematischen Themen eignet sich der Einsatz von Software,
mit deren Hilfe die Koordinatensysteme dargestellt werden können. Die Programme
„Geometry Pad“ oder „Cabri Geometre“ haben sich beispielsweise als hilfreich
erwiesen. Die Thematik der Freiheitsgrade eines Systems kann mit geeigneten Video-
sequenzen aus dem Internet dargestellt werden.
Wie die Sensoren (AB 4) sollten auch die Aktoren immer anhand von konkret vor-
liegenden Komponenten erörtert werden. Es empfiehlt sich, die Bauteile von den
SuS möglichst verdrahten und testen zu lassen. Für die Getriebelehre in AB 7 sollten
einfache Zahnradsätze genutzt werden. Gerade mechanische Themenstellungen werden
nachhaltiger verinnerlicht, wenn praktische Übungen durchgeführt werden können. Das
Programm Yenka® verfügt über ein geeignetes Simulationsmodul von Zahnradgetrieben.MODUL 2: ROBOTIK-SYSTEME BEWEGEN SICH 11
5 Ohne Mathematik geht nichts
1. a) Schülerindividuelle Antwort. Beispiele: Kartesisches Koordi- zu 1.b Werkzeug-
natensystem in der Schulmathematik, Ortskoordinaten (GPS-System) koordinaten
im Spiel „Schiffe versenken“
b) siehe Abb. rechts
Werkstück-
Welt- koordinaten
2. Beim Umstellen der Maschine müssen nicht alle Befehle neu koordinaten
RobRoot-
programmiert werden, sondern nur die Koordinatensysteme ange- koordinaten
passt werden. In bestimmten Koordinatensystemen sind bestimmte
Bewegungen leichter zu programmieren.
3. a) bis f) siehe Abb. rechts zu 3. a) bis f)
c) Die Pfeile (Verbindungslinien) sind gleich lang und parallel.
d) Man addiert 2 zur 5 und 1 zur 2 neue Position (7/3)
e) Springer (– 2 / 5)
f) Die Regel lautet: x’ = – y und y’ = x; Dame (– 3 / 2), Turm (– 4 / 1),
Springer (– 2 / 5)
4. a) Translation um 5 in x- und 4 in y-Richtung, Rotation um 30°
b) P’(1 / 2)
c) Formel: x’ = x · cos (30°) – y · sin (30°);
y’ = x · sin (30°) + y · cos (30°); P’(4,87 / 6,23)
d) Mit der obigen Formel werden zunächst die gedrehten Koordi-
naten berechnet und dann mit 5 bzw. 4 addiert.
√3
x · 2 – y · 0,5
* e) Translation: (x‘) = (x + 5), Rotation: (x‘) =
y‘ y+4 y‘ (x · 0,5 + y · √23)
6 Die Natur und ihre Gesetze
1. a) Auf dem Mars erfährt Curiosity nur das 0,373-fache der 3. In den Fällen a), b), sowie c) und e) liegt eine beschleunigte
Anziehungskraft der Erde. Das entspricht einem Gewicht von ca. Bewegung vor. Die Geschwindigkeit ändert sich hierbei in Richtung
336 kg. und / oder Betrag. Bei c) handelt es sich um eine negative Beschleu-
b) Durch die geringere Gewichtskraft reicht der Druck auf den nigung (Verzögerung).
Bohrer nicht aus.
c) Ja. Gewichtskraft = Masse · Ortsfaktor, die Beschleunigungskraft 4. a) Nein, sie müssen aber magnetisierbar sein.
= Masse · Beschleunigung. Die Kräfte haben die gleiche Einheit b) Mithilfe von ferromagnetischen Stoffen, z. B. einem Hohlkörper
(nämlich Newton = (kg · m) / s2), also müssen auch Ortsfaktor und aus Eisen.
Beschleunigung die gleiche Einheit haben. Der Ortsfaktor ist ein c) Die Verwendung eines Elektromagneten.
Spezialfall der Beschleunigung.
m m
2. a) 6 · 9,81 2 = 58,86 2
s s
m
b) F = m · 58,86 2 (bei z. B. 60 kg entspricht dies 3531,6 N)
s
c) Beispielhafte Lösung: Nein, bei dieser Beschleunigung wird das
Blut aus dem Kopf gepresst und man wird nach einigen Sekunden
bewusstlos.
7 Bewegungen und Freiheitsgrade
1. a) Schülerindividuelle Lösungen. d) Wasser in eine Flasche abfüllt: mind. 5 Freiheitsgrade: drei zur
b) Je 1 Freiheitsgrad: Scharnier, Pendel einer Standuhr, Finger- Flasche, einen zum Greifen, einen zum Kippen. – Schweißpunkte
endgelenk, Zug; 2 Freiheitsgrade: Ring am Finger; 3 Freiheits- bei einer Autokarosserie setzt: 6 Freiheitsgrade: drei zum Bewe-
grade: Kugelgelenk; 6 Freiheitsgrade: Rakete gen und drei zum Drehen. – Gegenstände greifen und an einem
c) Schülerindividuelle Antwort; beispielsweise: 1 Freiheitsgrad: anderen Ort ablegen kann: mind. 4 Freiheitsgrade: drei zum
Scharniere, Drehgelenke; 3 Freiheitsgrade: alle Kugellagerungen; Bewegen, einen zum Greifen
6 Freiheitsgrade: alle starren Körper e) Ein Mensch hat weit über 30 Freiheitsgrade (Arme, Beine, Hüfte,
Hals, Finger …)12 LÖSUNGEN
Der Begriff „Freiheitsgrade“ wird teils unterschiedlich interpretiert. Hier verstehen wir darunter die Anzahl der unterschiedlichen Bewe-
gungsmöglichkeiten eines Objektes. Für starre Objekte sind das in der Regel drei translatorische und drei rotatorische Freiheitsgrade. Hin-
zu kommen ggf. noch Freiheitsgrade der Schwingung. Üblicherweise addiert man bei Mehrgelenkobjekten die einzelnen Freiheitsgrade,
sodass ein Objekt sieben oder mehr Freiheitsgrade haben kann.
2. a) siehe Abb. rechts zu 2.a
b) Hüftgelenk, Schultergelenk Kugelgelenk. – Ellenbogengelenk,
Kniegelenk Scharniergelenk. – Fußgelenk, Handgelenk Dreh-
scharniergelenk.
c) Gelenke für translatorische Verschiebung, Schiebe- oder Schub-
gelenke
planes Gelenk Scharniergelenk Rad- und Zapfengelenk Kugelgelenk
3. a) siehe Abb. rechts
b) Drehen um 360°? Kettengetriebe oder Zahnradgetriebe – zu 3.a Kettengetriebe
Greifen eines Gegenstandes? Zahnradgetriebe oder Reibradgetriebe Antriebskurbel
– Vor- und Zurückfahren auf einer Schiene? Schneckenradgetriebe
oder Stirnradgetriebe oder Zahnstangengetriebe
4. a) Serielle Kinematik: leicht zu konstruieren, jeder Antrieb be-
wegt nur ein Element. – Parallelkinematik: hohe Dynamik, geringe
Masse der Führungselemente.
b) 1 und 4 sind Parallelkinematiken, 2 und 3 sind serielle Kine- Zahnradgetriebe Riemengetriebe
matiken.
c) Weltraumfangarm: seriell, Platz ist vorhanden, Kraft wird be-
nötigt. – Leiterbahnen für Platinen: seriell, da einfache 2-D-Tätig- Schneckengetriebe
keit. – Weltraumteleskop: parallel, hochpräzise Arbeit, schwere
Last, viele Freiheitsgrade notwendig.
d) Sechs Freiheitsgrade der Bewegung, wegen der sechs Antriebs-
systeme extreme Genauigkeiten im Mikrometerbereich möglich,
Zahnstangengetriebe
kompakte Bauform (ein Schwenkarm könnte Ärzte verletzen) Kegelradgetriebe Reibradgetriebe
8 Aktoren wandeln Informationen
1. (Aktor Anwendung). Servo Servo in der Lenkung eines 4. 1 ms
Modellautos; Lautsprecher Lautsprecher in der Stereoanlage;
Lampe Deckenbeleuchtung; Elektromotor Motor in einer
Brotschneidemaschine 0°
1,5 ms
2. Gerät: Display, optischer Aktor, … sendet nach Steuerung durch
elektrische Energie Licht aus. Dies wird für die Beleuchtung z. B.
bei Scheinwerfern oder in der optischen Übertragungstechnik in 90°
Displays genutzt. Gerät: Türklingel, magnetischer Aktor, … nutzt
2 ms
die Bewegungsänderung von magnetischen Materialien in Magnet-
feldern. Dadurch können Bewegungen z. B. über eine Membran in
einem Lautsprecher erzeugt werden. Gerät: Bewegungsmelder, 180°
optischer Aktor.
10 ms 20 ms 30 ms 40 ms
3. a) Ein Servo ist winkelgeregelt bzw. positionsgeregelt. Er kann
anhand seines Eingangssignals eine bestimmte Winkelposition an-
fahren, selbstständig stoppen und diese halten. Eingesetzt werden
Servos dort, wo klar definierte Positionen benötigt werden.
b) Der schwarze Anschluss ist für die Masse (GND), der rote für die
Versorgung (VCC), und der gelbe für die Signalleitung (PWM).
c) PWM steht für Pulsweitenmodulation. Über die zeitliche Breite
der Pulse wird der Winkel, auf den der Servoarm gestellt werden
soll, gesteuert.MODUL 2: ROBOTIK-SYSTEME BEWEGEN SICH 13
5. Elektronik Mechanik
Vergleicher Verstärker Motor Getriebe Servoarm
PWM-
Eingang
Potenziometer
9 Mobile Systeme
1. a) Transportaufgaben; Krankenhaus; Büro (Post, Dokumente); c)
Reinigungsaufgaben; Spezialroboter (reinigen, untersuchen von Raum 3
Kanälen, nach Atomunfällen aufräumen); Forschungsroboter (auf
Planeten, in der Tiefsee); Militär (Drohnen, Bomben sprengen);
Fahrzeuge (autonomes Fahren).
Raum 1
b) Gemeinsamkeiten: Fortbewegungsmöglichkeiten, Sensoren zur
Orientierung, spezialisiert auf bestimmte Aufgaben. Unterschiede:
unterschiedliche Sensoren und Aktoren, unterschiedliche Fortbewe-
Raum 2
gungsmöglichkeiten (Räder, Ketten, Beine).
2. Schülerindividuelle Lösungen.
Weltmodellierung
3. a) Weltmodellierung: Die Umwelt wird durch Sensoren regist-
riert. Ein Weltbild wird erstellt und der beste Weg wird anschließend Raum 3
abgefahren. Bsp: Staubsaugerroboter.
Verhaltensprogrammierung: Programmiert wird ein Verhalten,
das eine Reaktion auf entsprechende Sensorwerte darstellt. Bsp.:
Raum 1
Mähroboter.
b)
Raum 2
Hin
der geplante Bahn
nis
Verhaltensprogrammierung
Öff
Entfernung
nun
g Bei der Weltmodellierung muss an jedem „Knick“ eine neue Welt
Hin erstellt werden. Bei der Verhaltensprogrammierung könnte sich der
der
Hindernis nis Roboter ggf. im kleinen Raum 1 sehr lange aufhalten. Deswegen ist
die Weltmodellierung vorzuziehen.
Winkel14 LÖSUNGEN
Modul 3 Robotik-Systeme handeln selbstständig
Einführung in das Thema
Erst durch intelligentes Programmieren und Steuern wird das Infos zu den Arbeitsblättern
Zusammenarbeiten von Sensoren und Aktoren einer Maschine
zu einem Roboter. Der Weg von der einfachen Maschine hin Arbeitsblatt 10 bildet die Grundlage für die
zum intelligenten Roboter wird in diesem Modul abgebildet. Maschinentechnik. Das EVA-Prinzip wird anhand
Es beginnt mit den entscheidenden Komponenten und Größen eines Roboterarms wiederholend vorgestellt und die verschiedenen
einer Maschine, die die körperliche Arbeit des Menschen Funktionselemente einer Maschine werden erläutert.
übernimmt. Das Herzstück eines Roboters ist in einfachen
Arbeitsblatt 11 ist eine Einführung in die Grundlagen eines Mikro-
Ausführungen der Mikrocontroller, bei komplexeren Robotern
controllers am Beispiel des Arduino; die meisten Aufgaben lassen
sind es ganze Computersysteme. Dieses Modul beschränkt sich
sich jedoch auch mit anderen Mikrocontrollern, z. B. dem System
auf die genauere Betrachtung eines Mikrocontrollers und dessen
Calliope oder dem Raspberry Pi, bearbeiten.
Funktionsweise.
Arbeitsblatt 12 behandelt die Funktionsweise von HF-Sendern
Die häufigste Übertragung der Signale zur Kommunikation
und -Empfängern sowie den Aufbau eines HF-Signals.
zwischen Robotern und Menschen funktioniert über Fern-
Hinweis: In Aufgabe 1 geht es nicht darum, Schwingkreis, Genera-
steuerungen mittels Funksignalen. Es gibt aber auch neuere
tor oder Verstärker zu verstehen. Sie stehen als Blackbox, die jeweils
Steuerungsmöglichkeiten, vom Exoskelett bis hin zur Steuerung
eine bestimmte Aufgabe erfüllen.
über Gedanken. Ein moderner Roboter wird zu einer Maschine
entwickelt, die gar nicht mehr gesteuert werden muss, sondern Arbeitsblatt 13 setzt den Schwerpunkt bei verschiedenen Fern-
autonom auf ihre sich wechselnde Umwelt reagiert und steuerungen eines Roboters bis hin zu zukünftigen technischen
angemessen agiert. Anwendungen der Robotertechnik (Telepräsenz und Steuerungen
über spezielle Mensch-Maschine-Schnittstellen).
Arbeitsblatt 14 stellt die Stufen autonomen Fahrens sowie ver-
schiedene andere autonome Systeme vor. Rechtliche und ethische
Fragen werden diskutiert.
Methodische Vorgehensweise
Die Arbeitsblätter sind unabhängig voneinander einsetzbar. Je nach
Vorwissen der Schülerinnen und Schüler (SuS) kann dies unterschiedlich
viel Zeit in Anspruch nehmen. Bei der Umsetzung empfehlen sich die
Sozialformen Einzel- sowie Partnerarbeit. Die praktischen Aufgaben zur
Mikrocontroller-Programmierung sollten bei vorhandener Zeit möglichst
umgesetzt werden. An einzelne Rechercheaufgaben lassen sich sinnvoll
Gruppendiskussionen anschließen.
MEDIEN
Wie man Motor-Shields am Arduino ansteuert,
finden Sie unter https://space2school.de/schrittmotoren
Weitere Ideen für Projekte mit einem Mikrocontroller finden
Sie unter https://space2school.de/mikrocontroller
Auf YouTube gibt es sehr viele Tutorials zur Programmierung
von Mikrocontrollern, auch auf deutsch.MODUL 3: ROBOTIK-SYSTEME HANDELN SELBSTSTÄNDIG 15
10 Grundlagen der Maschinen- und Robotertechnik
1. a) 3. Bohrmaschine: Zahnradgetriebe; kompakt, robust, wartungs-
Verarbeitung arm, laut. Fahrrad: Kettengetriebe; großer Achsabstand möglich,
mögliche Steuerungsbauteile: robust, wartungsarm. Baggerarm: Druckmittelgetriebe; hohe
Wandler, Strombegrenzer,
Transistoren, Relais, Widerstände …
Übersetzung möglich, große Kraftübertragung, evtl. schädliche
Abfallstoffe. Wagenheber: Schraubengetriebe; hohe Übersetzung
Ausgabe möglich, leise, selbsthemmend.
mögliche Aktoren:
Eingabe Motoren, Servos,
mögliche Sensoren: Lampen … 4. (1) Getriebewelle – verbindet Getriebeteile / Zahnräder. (2) Ge-
Schalter, Taster, lenkwelle (Kardanwelle) – überträgt Kräfte / Drehmomente bei nicht-
Kameras …
fluchtenden Achsen. (3) Profilwelle (Formwelle) – überträgt ohne
b) Schlupf große Kräfte. (4) Kurbelwelle – überträgt Hin- und Her-
bewegungen in eine Kreisbewegung. (5) Biegsame Welle – erlaubt
Sicherheitsteil Übertragungssteil Umlenkungen der Drehkraft (Tachowelle).
Kabelschutz beweglicher Arm
5. a)
Arbeitsteil Antriebsteil Z4 Z7
Fräser Motor Z1 Z5
Z2 Z3 Z6
Steuerteil Trägerteil
Fernbedienung Gehäuse A B C
2. a) Weiterleiten von Rotationsenergie vom Antrieb zum Abtrieb, b) A: Z 2 dreht langsamer als Z 1, das Drehmoment der Welle von
Wandlung von Drehmoment, Wandlung von Drehzahl, Wandlung Z 2 ist größer als Z 1. – B: Z 4 dreht schneller als das Z 3, das Drehmo-
von Drehrichtungen. ment der Welle von Z 4 wird kleiner. – C: Z 5 und Z 7 drehen gleich
b) Reihenfolge immer: Getriebeart – Getriebeeigenschaften – schnell, das Drehmoment beider Wellen bleibt gleich.
Beispiel.
Zahnrad- oder Reibradgetriebe – Kräfte werden durch zwei 6. a) Drehmomente: M1 = 50 Nm, M2 = 25 Nm
oder mehr Räder übertragen – Bohrmaschine. Ketten- oder b) Vergrößert sich der Durchmesser (und damit der Radius) des
Riemengetriebe – Kräfte werden durch ein Zugmittel übertragen Zahnrads, dann vergrößert sich auch das Drehmoment und umge-
– Fahrradantrieb. Druckmittelgetriebe – Kräfte werden durch ein kehrt.
Druckmittel (Luft, Öl) übertragen – Baggerarm. Gelenkgetriebe –
Kräfte werden durch mechanisch verbundene Bauteile übertragen
– Kolbentrieb im Verbrennungsmotor. Kurvengetriebe – Kräfte
werden über Nocken übertragen – Nockenwelle. Schrauben-
getriebe – Kräfte werden durch Schrauben oder Schnecken über-
tragen – Wagenheber.
11 Funktionsweise von Mikrocontrollern
1. a) Im Mikroprozessor ist nur die CPU (zentrale Recheneinheit) 2. Reihenfolge immer: Bauteil (Aufgaben). – CPU (Zentrale Rechen-
enthalten, im Controller noch die notwendige Peripherie wie Spei- einheit, führt Berechnungen und logische Operationen durch). –
cher, Timer … Speicher (enthält das Programm und Daten). – Interruptcontroller
b) Vorteile: geringer Stromverbrauch, viel kleiner und kompakter, (reagiert auf externe und interne Ereignisse und meldet diese dem
spezialisiert auf eine Aufgabe, preisgünstiger. Nachteile: kleinere Programm). – Watchdog (Programm zum gezielten Reset, wenn
Taktung (MHz statt GHz), weniger RAM (KB statt GB), führt oft nur das Hauptprogramm sich aufgehängt hat). – Eingänge (Anbinden
eine Aufgabe gleichzeitig aus, bei Defekt kompletter Austausch, externer Peripherie). – Ausgänge (Steuern von Verbrauchern). –
kein Betriebssystem. Timer (Funktionsmodul zum Messen von Zeiten und Zählen von
Ereignissen). – PWM (Pulsweitenmodulation zur Erzeugung eines
analogen Ausgangssignals). – AD-Wandler (analoge Eingangswerte
werden in digitale Zahlenwerte gewandelt). – Unterschiede in der
Taktung (Arbeitsgeschwindigkeit) des Prozessors, in der Möglich-
keit der Parallelverarbeitung (bis 64 Bit), in der Art und Größe des
Speichers und in der Programmiersprache.16 LÖSUNGEN
3. a) I 2C-Pins (SCL und SDA) „Digital“-Pins (insgesamt 14 Stück)
• Serielle Datenausgabe • Signal-Eingänge für digitale Sensoren (5 V)
(u. a. für LCD-Displays) • Signal-Ausgänge für digitale Schaltungen (5 V)
• Pins mit Tilde-Zeichen: PWM-Modulation möglich
Reset-Button:
• Neustart des Arduions
USB-Anschluss:
• Stromversorgung
• Upload von Programmen
ICSP-Header:
• Serielle Datenübertragung • Programmierung neuer Mikrocontroller
(mit einem Bootloader)
Mikrocontroller:
• Recheneinheit
• Arbeitsspeicher
Hohlbuchse: • Speicher für Quellcode
• Externe Stromversorgung (min 7 bis max 12 V)
• Für Hohlstecker mit 5,5 mm Außen- und 2,1 mm
Innendurchmesser
• nur nötig, wenn keine USB-Verbindung vorhanden
Stromversorgung: „Analog“-Pins (insgesamt 6 Stück):
•5 V, 3,3 V und GND-Anschluss • Signal-Eingänge für analoge Sensoren (0 – 5 V)
für externe Schaltungen
b) Schülerindividuelle Lösungen. Sensor sendet Signal Signal auswerten und an Display senden
wenn Signalwert größer als unterer Grenzwert und kleiner als
4. a) Bauteile: Arduino, Ultraschall-Distanzsensor, Motor-Shield (für oberer Grenzwert: Lüfter einschalten, ansonsten nicht
die Ansteuerung von Elektromotoren), Autobausatz, Bumper-Sensor, c) Bauteile: Arduino, Foto-Widerstände (2 Stück), Motor-Shield,
LED – PINS: (z. B.) 2 und 11 für Motor 1, 5 und 6 für Motor 2, Autobausatz – PINS: (z. B.) 2 und 11 für Motor 1, 5 und 6 für
Sensor: 12 und 13, Bumper 3 – Ablaufplan: Motoren erhalten Motor 2, Foto-Widerstände: 0 und 1 (links und rechts) – Ablauf-
Wert für das Fahren Wenn Bumper aktiv Motoren bleiben plan: Motoren erhalten Wert für das Fahren beide Sensorwerte
stehen und LED geht an abrufen wenn linker Sensorwert größer, dann linken Motor
b) Bauteile: Arduino, Temperatursensor, Display, Lüfter (z. B. alter drosseln, ansonsten rechten drosseln Sensorwerte auswerten
PC-Lüfter) – PINS: Temperatursensor 2 (zusätzlich 5 V und GND), wenn Sensorwerte größer als Grenzwert, beide Motoren drosseln,
Display (z. B.) 4 – 8 und 13, Lüfter 9 (zusätzlich Strom) – Ablaufplan: ansonsten Motorwerte belassen wiederholen
12 Hohe Frequenzen für Roboter – die HF-Technik
1. a) Richtige Reihenfolge: 4 – 2 – 5 – 3 – 1 4. a) Es gibt rund 13 verschiedene Bänder. Die bekanntesten sind
b) (1) Die Antenne empfängt die elektromagnetische Welle. Langwellen (30 – 300 kHz) für Langwellenrundfunk und Funkuhren;
(2) Der Schwingkreis schwingt entsprechend der empfangenen Mittelwellen (0,3 – 3 MHz) für Mittelwellenrundfunk, Amateurfunk
Schwingung. (3) Die hochfrequente Schwingung wird von der und militärischen Funk; Kurzwellen (3 – 30 MHz) für Kurzwellenrund-
niederfrequenten Informationsschwingung getrennt (Demodulati- funk, RFID; Ultrakurzwellen (30 – 300 MHz) für UKW-Radio, Flug-
on). (4) Die Informationsschwingung wird verstärkt und auf einen funk, Radar; das UHF-Band (0,3 – 3 GHz) für Mikrowellen, WLAN,
Lautsprecher übertragen. Bluetooth, DVB-T, DAB+; Zentimeterwellen (3 – 30 GHz) für Radar,
Satellitenfunk, EPR.
2. Schülerindividuelle Lösungen. Eine Bauanleitung steht unter b) Die Bänder haben unterschiedliche physikalische Eigenschaften.
https://space2school.de/PapprollenRadio MW kann weit gesendet werden, hat aber eine schlechte Qualität.
FM und AM sind verschiedene Modulationsarten der Wellen. AM ist
3. Amplituden-Modulation (einfach), während FM Frequenz-Modulati-
on (aufwendiger, bessere Tonqualität) bedeutet.
Amplitude
Amplitude
c) In Deutschland sind das 890 – 960 MHz (GSM) sowie
1920 – 2170 MHz (UMTS)
Zeit Zeit
s
a) b) 5. v = s=v·t
t
Lichtgeschwindigkeit in Luft angenommen mit 299 705,518 km/s
Amplitude
m
s = 299705518 · 0,000001981 s = 593,42 m
s
Da die Zeit für den Hin- und Rückweg gilt, ist der Gegenstand ca.
Zeit
296,71 m entfernt.
c)MODUL 3: ROBOTIK-SYSTEME HANDELN SELBSTSTÄNDIG 17
13 Fernsteuerungen
1. Bagger, Kräne, Atomkraftwerke, Medizin (endoskopische 5. a) Mensch und Maschine bilden eine Einheit, viel genauere Steu-
Chirurgie), Militär (Drohnen), VR bei Computerspielen, Weltraum- erung ist möglich, realitätsnahe Steuerung.
missionen, Landwirtschaft. b) Gefahrengütertransport, Militär, kraftaufwendige Arbeiten, fein-
fühlige Arbeiten, Arbeiten im Weltraum (Weltraumspaziergang).
2. linkes Beispiel: Zeitverzögerung bei der Datenübertragung, c) Kraftrückkopplung ist möglich, dadurch reduziert sich die Gefahr,
schlechte Qualität der Bildübertragung, Unterbrechung des aufgrund des mangelnden Widerstandsgefühls Objekte zu beschä-
Funkkontaktes Steuerung nicht möglich, Batterie entlädt sich. – digen. Gefahren, die nicht per Bild übertragen werden, sind per
rechtes Beispiel: Kraftentfaltung nicht fühlbar, falsche Abschät- Rückkopplung mitteilbar.
zung der Dimensionen des Roboters, Ungenauigkeit beim Positio-
nieren. 6. Arten von Fernsteuerungen: Steuerung über Gedanken (Neu-
ronale Implantate = Elektroden im Gehirn) sowie EMG (Elektromyo-
3. Schülerindividuelle Lösungen. graphie = Messung der Muskelaktivität).
Funktionsweise. Neuronale Implantate: Hierbei werden Senso-
4. a) Telepräsenz soll einen möglichst realistischen Eindruck von ren ins Gehirn eingesetzt, welche die Nervenaktivität (elektrische
einer weit entfernten Umgebung vermitteln, so als ob man real Ströme) messen.
anwesend wäre. EMG: Mithilfe von Oberflächenelektroden werden Muskelkontrak-
b) Stereoskopische Bilder liefern, Interaktivitäten ermöglichen, tionen sehr genau gemessen. Mithilfe von Nadeln, die man in den
Positions- und Orientierungstracking, Raumton vermitteln, Geruch Muskel einführt, kann man auch die Aktivität einzelner Muskel-
übertragen, mechanische Schwingungen rückkoppeln… fasern erfassen.
c) Andocken der Sojus-Kapseln, Steuern des sogenannten Canad-
arms an der Außenwand der ISS …
d) Durch kraftreflektierende Joysticks kann die Fernsteuerung fein-
fühliger bedient werden.
14 Autonome Systeme
1. Level 0: Der Fahrer fährt selbst, lenkt, gibt Gas, bremst etc. b) (1) Ultraschallsensoren (Entfernungsmessung von feststehen-
Level 1: Bestimmte Assistenzsysteme unterstützen die Fahrer bei der den Gegenständen), Radarsensoren (bewegliche Gegenstände) –
Fahrzeugbedienung. Level 2: Teilautomatisierung (z. B. Einparken, (2) Ultraschallsensoren (Entfernungsmessung von feststehenden
Spur halten, Beschleunigen oder Abbremsen werden von Assistenz- Gegenständen), Taster für die Kollision mit Gegenständen. –
systemen übernommen). Level 3: Das Fahrzeug führt selbstständig (3) Radar- und Lidarsensoren zur Erfassung von Gegenständen,
Funktionen wie Blinken, Spurwechsel und -halten durch. Der Fahrer Ultraschallsensoren zur Höhenmessung, Funksensoren zur Da-
muss das System nicht überwachen, er wird bei Bedarf innerhalb tenübermittlung. – (4) Utraschallsensoren, Radar- und Lidarsen-
einer Vorwarnzeit zur Übernahme der Führung aufgefordert. Level soren, Kameras zur Erfassung der Umgebung, GPS-Sensoren zur
4: Die Führung des Fahrzeugs wird dauerhaft vom System gewähr- Erfassung des Standorts, GSM-Sensoren für Datenübertragung,
leistet. Werden die Fahraufgaben vom System nicht mehr bewältigt, Lichtsensoren. – (5) Utraschallsensoren, Kameras zur Erfassung der
kann der Fahrer aufgefordert werden, die Führung zu übernehmen. Umgebung, Funksensoren zur Datenübertragung von der Basis,
Level 5: Das Fahrzeug ist völlig autonom. Es ist ohne Lenkrad aus- Thermosensoren zur Erfassung der Temperatur, Lichtsensoren,
gestattet und kann sich fahrerlos bewegen. Neigungssensoren – (6) Utraschallsensoren, Radarsensoren, Kameras
zur Erkennung von Menschen oder Gegenständen, Funksensoren
2. Schülerindividuelle Lösungen. zur Datenübertragung, Mikrofone zur Erfassung von Sprache,
Lichtsensoren.
3. a) Unterfahrschlepper (1) – Staubsaugerroboter (2) – Drohne (3) c) Schülerindividuelle Antworten.
– Autonom fahrender Elektrobus (4) – Mars-Roboter (5) – Service-
roboter in der Pflege von Menschen (6)
Es gibt – vor allem bei den Systemen mit sehr hoher Komplexität –
keine eindeutige Reihenfolge des Komplexitätsgrades. Vermutlich
wird der Serviceroboter für die Pflege von Menschen von allen auf
Stufe 6 gesetzt.18 LÖSUNGEN
Modul 4 Robotik-Systeme erfüllen einen bestimmten Zweck
Einführung in das Thema
Roboter werden immer zweckbestimmt gebaut. Die Auf- Infos zu den Arbeitsblättern
gabenspanne heutiger Roboter umfasst nahezu alle Bereiche
des Lebens – sowohl im beruflichen als auch im öffentlichen Arbeitsblatt 15 behandelt die Interaktionen zwischen
und privaten Bereich. Dieses Modul behandelt schwerpunkt- Menschen und Maschinen, der sogenannten Mensch-
mäßig Roboter, die nicht nur stationär einem vorgegebenen Maschine-Schnittstelle (MMS).
Ablauf folgen, sondern mithilfe von Sensoren besondere Auf-
In Arbeitsblatt 16 lernen die SuS spezielle Serviceroboter und das
gaben übernehmen oder Menschen bei der Durchführung ihrer
Thema „künstliche Intelligenz“ näher kennen.
Aufgaben unterstützen.
Arbeitsblatt 17 gibt Beispiele für Robotersysteme, die den
In den Arbeitsblättern dieses Moduls werden Robotersysteme
Menschen in extremen Situationen unterstützen.
vorgestellt, die den meisten Schülerinnen und Schülern (SuS)
Hinweis: In den Aufgaben 2 und 3 werden farbige Abbildungen
vermutlich nicht sofort in den Sinn kommen, wenn man über
zum Bearbeiten benötigt. Falls Sie Schwarz-Weiß-Kopien des
Roboter spricht. Dies soll die Vielfalt und die bereits tiefe
Arbeitsblattes an Ihre SuS verteilen, können Sie über den folgenden
Durchdringung unseres Lebens mit Robotersystemen darstellen.
Link farbige Bilder für alle SuS projizieren oder Sie drucken diese auf
Bei einigen Robotern lässt sich die Frage stellen, ob es sich
einem Farbdrucker aus:
überhaupt um Roboter handelt. Damit kann man thema-
https://space2school.de/AB17
tisieren, worauf sich Robotersysteme reduzieren lassen: Sie
sind keine Maschinen, die einem Menschen ähnlich sehen und Arbeitsblatt 18 stellt spezielle Robotersysteme in der
sich menschenähnlich verhalten, sondern Maschinen, die mit Raumfahrt vor.
Sensoren und Aktoren ausgestattet und frei programmierbar
sind.
Methodische Vorgehensweise
In diesem Modul wird neben klassischen methodischen Vorgehens-
weisen auch ein Rollenspiel vorgeschlagen. Insbesondere bei
Themen, in denen Emotionen und persönliche Betroffenheit zur
Sprache kommen, ist diese Methode geeignet, da die SuS klare
Positionen beziehen müssen. Den Lernenden muss allerdings genug
Zeit zur Erarbeitung der inhaltlichen Themen gegeben werden.
MEDIEN
Insbesondere in diesem Modul ist der Einsatz von Computern und dem Internet zu
empfehlen. Viele Unterrichtsinhalte des Moduls lassen sich nur mit modernen Medien
adäquat umsetzen.
Die in diesem Modul verwendete App „Space 4D“ von Octagon Studio ist eine kosten-
lose App. In-App-Käufe sind möglich, für die Grundbenutzung aber nicht notwendig.
App und Demokarten kann man unter folgender Adresse beziehen:
https://www.octagonstudio.com/products/edu/space-4d-plusMODUL 4: ROBOTIK-SYSTEME ERFÜLLEN EINEN BESTIMMTEN ZWECK 19
15 Mensch-Maschine-Schnittstellen
1. Pedal: Mit dem Fuß – die Hände bleiben frei, der Fuß kann b) Das Aktivieren / Deaktivieren von Displays, die Aufmerksam-
relativ viel Druck aufbauen. Sprachsteuerung: Über die Spra- keitsspanne von Autofahrern, die Steuerung des Mauszeigers eines
che – man kann in fast jeder Haltung eine Eingabe machen, aber Computers, das Scharfstellen von Stereodisplays …
Hintergrundgeräusche können stören. Smartwatch: Mit einem ein-
zelnen Finger – man kann aus Versehen die falsche Taste drücken. 5. a) VR = virtual reality. Als virtuelle Realität bezeichnet man die
Fahrrad / Mofa / Motorrad: Mit verschiedenen Fingern einer Hand Darstellung und Wahrnehmung von Szenarien und ihren physika-
– da die Hand zum Lenken benötigt wird, ist die Eingabe nicht lischen Eigenschaften durch eine von einem Computer in Echtzeit
ungefährlich. erschaffene Umgebung. – AR = augmented reality. Unter erwei-
terter (augmented) Realität versteht man die computergestützte
2. a) Das System sollte selbsterklärend sein, eine Hilfefunktion sollte Erweiterung der Wahrnehmung der menschlichen Sinnesorgane
vorhanden sein, das System darf nicht überladen sein, die Buttons durch Ergänzung von Bildern, Videos oder computergenerierten
dürfen nicht zu nahe aneinander liegen, das System muss in einer Zusatzinformationen mittels Einblendung oder Überlagerung.
geeigneten Höhe montiert werden … b) VR: Computerspiele, virtuelle Rundgänge oder Ansichten einer
b) Usability ist die vom Nutzer erlebte Qualität im Umgang mit Umgebung, künstliche Welten … – AR: Überlagerung von Bildern
einem technischen Gerät. Die Benutzung soll einfach sein und zum durch Computerinformationen, Einblenden von Hinweisen in eine
Nutzer und seinen Aufgaben passen. Brille oder auf die Windschutzscheibe eines Fahrzeugs …
c) Datenbrille, Smartphone, Kopfhörer, Computer.
3. links: Alle Eingaben müssen über verschiedene Schalter am Joy- d) Schülerindividuelle Lösungen.
stick erfolgen. Der Nutzer muss sich in das System eindenken. – Der
Anwender sieht die Ergebnisse nur zweidimensional. Er ist oftmals 6. Schülerindividuelle Lösungen.
abgelenkt von der Umgebung.
rechts: Die Handhabung des Systems ist intuitiv und erfolgt nur 7. Bestehende Berufe: Routinetätigkeiten im unteren und mitt-
mit Gesten oder Bewegungen. – Alle Aktionen werden räumlich leren Bereich unterliegen der Automatisierung, an- und ungelernte
wahrgenommen. Der Benutzer kann störungslos vollkommen in das Arbeiter verlieren ihre Arbeit, großer Umschulungsbedarf. – Ent-
System eintauchen. stehende Berufe: steigende Nachfrage nach höheren Qualifika-
tionen, flexible Organisation möglich, lebenslange Weiterbildung
4. a) Eye-Tracking = Erfassen über Augenbewegungen. Von einer nötig, häufige technische Weiterentwicklung.
Kamera und einem Computer werden Punkte erfasst, die man
betrachtet, Augenbewegungen aufgezeichnet und ausgewertet. Er- 8. Schülerindividuelle Lösungen.
fassen lässt sich, was z. B. auf einer Bildschirmseite wahrgenommen
wird, welche Betrachtungsdauer einzelne Dinge haben …
16 Roboter als Helfer im Alltag
1. Serviceroboter – Industrieroboter (Beispielhafte Lösung): b) (Prio) – Aufgabe (Beispielhafte Lösung):
unbekannter Einsatzort – vorgegebener Einsatzort (1) Keinen Menschen berühren – (2) Sich nicht selber berühren –
einfache Bedienung durch den Anwender – komplizierte Bedienung (3) Sich im Raum orientieren – (4) Keinen Tisch berühren – (5) Be-
durch Fachpersonal fehle von Gästen verstehen – (6) Ein Tablett halten – (7) Ein Getränk
wartungsarm – regelmäßige Wartung nicht verschütten – (8) Das richtige Getränk an den richtigen Tisch
robust – filigran bringen
energieeffizient – aufgabeneffizient c) KI = Maschinen bzw. Programme, die selbstständig auf neue
Gegebenheiten reagieren, also dazulernen und so ihr Handeln
2. Haushalt: saugen, wischen, Rasen mähen, Haushaltsassistenten; anpassen und verbessern. Streng genommen ist derzeit nur eine
Landwirtschaft: Melkroboter, Erntehelfer; Kommunen: Fassaden- „Mustererkennung“ erreicht, noch keine KI.
oder Dachreinigung; Schwimmbadbodenreinigung; Medizin: Geh- d) Nein, die verstandenen Fragen werden an Server geschickt,
und Bewegungshelfer, Pflege, Kommunikationsroboter; Rettung / die den Text nach Mustern durchforsten und die Antwort mit der
Sicherheit: Drohnen zur Überwachung und Meldung; Spielzeug: höchsten Wahrscheinlichkeit zurückschicken.
Aibo, qfix, Lego Mindstorms; Hotel- und Gastwirtschaft: Service-
roboter, Reinigungsroboter 5. a) Je weniger Masse bewegt werden muss, desto weniger Ener-
gie benötigt man; es reichen kleinere Elektromotoren; die Getriebe
3. Schülerindividuelle Lösungen. werden nicht so belastet und können leichter gebaut werden; man
benötigt keine externe Halterung für den Arm.
4. a) Er besitzt Sensoren, die eine Kollision mit Menschen verhin- b) Alle Kabel, Motoren und Getriebe befinden sich im Arm; keine
dern, er lässt sich führen. Ecken und Kanten, die Menschen verletzen könnten und keine
Zwischenräume, in denen man sich die Finger / Hand einklemmen
könnte.Sie können auch lesen