Auto motion Next Level - Automatisiertes Fahren bei IAV
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

auto motion IAV-Kundenmagazin | 03/2019 Next Level Automatisiertes Fahren bei IAV

Bis zum selbstfahrenden
automotion | Editorial 3
Fahrzeug sind es fünf Level.
Wir erklären, was sie bedeuten. Liebe Leserin, lieber Leser,
in Hamburg gilt seit einiger Zeit: The HEAT is on! Dahinter steckt die das System in einen Comfort Layer und einen Active Safety
allerdings keine ungewöhnliche Hitzewelle in der Hansestadt – Layer aufteilt. Mehr dazu erfahren Sie in unserem Bericht auf
stattdessen macht in der dortigen HafenCity ein autonomer, Seite 12.
elektrisch angetriebener Shuttle von sich reden.
Der Klimaschutz ist derzeit eines der beherrschenden Themen der
Subline
HEAT (Hamburg Electric Autonomous Transportation) wurde von politischen Debatte. Sicher ist: Auch der Mobilitätssektor muss
IAV in Kooperation mit Partnern wie der Hamburger Hochbahn AG, einen Beitrag zur Verringerung der CO2-Emissionen leisten. Wie
der Hamburger Behörde für Wirtschaft, Verkehr und Innovation genau das am besten zu erreichen ist, sollte aber offen und je nach
(BWVI), der Siemens Mobility GmbH, dem IKEM – Institut für Anwendungsfall diskutiert werden. Neben batterieelektrischen
Klimaschutz, Energie und Mobilität sowie dem Deutschen Zentrum Antrieben ist beispielsweise auch der Einsatz von Wasserstoff
für Luft- und Raumfahrt (DLR) entwickelt. Das Projekt will beweisen, und von synthetischen Kraftstoffen eine interessante Option.
dass selbstständig fahrende Kleinbusse vollständig in den Über diese Fragen sprechen Dr. Joachim Damasky vom VDA und
Straßenverkehr und den ÖPNV einer Metropole integriert werden IAV-Geschäftsführer Matthias Kratzsch im automotion-Interview
können. Eine dreiwöchige Testphase im August verlief sehr erfolg- ab Seite 24.
reich, und im Februar 2020 folgt bereits der nächste Schritt:
Dann wird HEAT mit maximal 25 Kilometern pro Stunde autonom Weitere Themen in dieser Ausgabe: Schadensanalysen von me-
durch die HafenCity fahren. Mehr dazu finden Sie in dieser Aus- chanischen Bauteilen (Seite 30), neue Strategien gegen Cyber-
gabe der automotion ab Seite 8 – im Rahmen unseres Fokusthemas Angriffe auf Fahrzeuge (Seite 32), die strategische Planung von
„Automatisiertes Fahren“. elektrischen Verteilnetzen (Seite 38) und der Transfer von KI-
Methoden in die Praxis (Seite 40).
Eine der größten Herausforderungen bei autonomen Fahrzeugen
wie HEAT ist die Sicherheit. Um sie zu gewährleisten, setzt IAV beim Wir wünschen Ihnen eine anregende Lektüre!
Sicherheitskonzept auf eine funktionale Mehrschichtarchitektur,
Level 1 Level 2 Level 3 Level 4 Level 5
DRIVER PARTIAL CONDITIONAL HIGH FULL
ASSISTANCE AUTOMATION AUTOMATION AUTOMATION AUTOMATION
Assistenzsysteme Das Auto kann Der Fahrer kann Das Fahrzeug Reagieren die Ob mit oder ohne
wie der Abstands- einzelne Aufgaben über einen längeren kann hochkomple- Passagiere nicht, Insassen – ab jetzt
regeltempomat für den Fahrer Zeitraum einfache xe Fahrsituationen erreicht das fährt das Fahrzeug
(ACC, Adaptive übernehmen, zum und definierte selbst meistern Fahrzeug selbst komplett selbst-
Cruise Control) Beispiel selbst- Aufgaben vollstän- und fährt selbst- einen sicheren ständig von A nach
unterstützen den ständig einparken, dig an das Fahrzeug ständig. Der Fahrer Zustand, indem B. Ein Lenkrad
Fahrer im Straßen- die Spur halten delegieren. Das wird zum Passa- es zum Beispiel gibt es nicht mehr.
verkehr. Der Fahrer oder im Stau Auto kann den gier, der zwar das anhält. Aktuell ist Passagiere haften Dr. Ulrich Eichhorn Matthias Kratzsch Katja Ziegler Kai-Stefan Linnenkohl
behält jedoch die bremsen und Fahrer kurzfristig Lenkrad über- rechtlich nicht nicht für Schäden. Vorsitzender der Geschäftsführung Geschäftsführer Technik Kaufmännische Geschäftsführerin Geschäftsführer/Arbeitsdirektor
Verantwortung und beschleunigen. Der auffordern, die nehmen kann, eindeutig geklärt, Wer allerdings IAV GmbH IAV GmbH IAV GmbH IAV GmbH
Kontrolle. Fahrer überwacht Führung wieder zu aber nicht muss. wer die Verantwor- stattdessen im
das Auto und ist übernehmen. Der In gefährlichen tung bei Schäden Schadensfall
verantwortlich. Fahrer ist auch hier Situationen warnt übernimmt, wenn haftet, ist bislang
verantwortlich für das Fahrzeug das Auto selbst- nicht geklärt.
alles, was passiert. die Passagiere. ständig fährt.
4 Inhalt | automotion automotion | Inhalt 5
30
Diagnose für Komponenten
Bei der Schadensanaylse nehmen
IAV-Spezialisten mechanische Bauteile
intensiv unter die Lupe.
6 Next Level
Automatisiertes Fahren bei IAV
Keine Safety ohne Security
32
Editorial 3 Trends
24
Gemeinsames Forschungsprojekt mit
Mit digitalen Ameisen effizient HAW Hamburg und easycore GmbH:
zu besseren Stromnetzen 38 Angriffe auf Fahrzeugflotten erkennen
Fokusthema
und abwehren.
Transfer von KI-Methoden
Next Level 6 in die Praxis 40
The HEAT is on 8
Erster autonomer Shuttlebus
Spurwechsel
in Hamburg 10
Sicher beim autonomen Fahren 12 Angst vor der Innovation? 42
Pionierarbeit für die Automatisierung 14 Mit digitalen Ameisen effizient
zu besseren Stromnetzen
Über IAV
38
Forschen, fördern und vernetzen 16
Eine IAV-Lösung unterstützt die strategi-
Dreischichtbetrieb im
sche Planung von Verteilnetzen, die alle
Berliner Himalaya 44
Impulse Anforderungen an ein modernes Energie-
Partner auf Augenhöhe 46 versorgungssystem erfüllen.
Den Blick im Blick 22
Neue Prüfstände für E-Mobilität 48
„Jetzt Entscheidungen treffen“ 24
Studentisches Experten-Know-how
Optimiert für die Flotte, auf dem Hockenheimring 50
individualisierbar für jedes Modell 28
Zurück in die Zukunft 4.0 52
Diagnose für Komponenten 30
IAV live und in Farbe! 53
Keine Safety ohne Security 32
Unser Engineering 54
46
Projektstart mit dem
Software Campus 34 Unser Produktportfolio 56
„Jetzt Entscheidungen treffen“ Partner auf Augenhöhe
Bei IAV hackt´s 35 IAV-Termine: Treffen wir uns? 58
Ein Zwiegespräch zwischen Dr. Joachim Damasky, Geschäftsführer Technik DEKRA und IAV kooperieren bei der
des Verbands der Automobilindustrie (VDA) und Matthias Kratzsch, Komponenten im Dauerstress 36 Impressum 59 EMV-Prüfung von Fahrzeugen.
Technik-Verantwortlicher in der IAV-Geschäftsführung
6 Fokusthema | automotion automotion | Fokusthema 7
PERCEPTION
V2X-COMMUNICATION
Aus den Informationen der
Staus vermeiden, Fahrtzeiten
Radar- und Lidar-Sensoren sowie
verkürzen, energieeffizient Fahren:
Kameras am Fahrzeug errechnen
Über die V2X-Kommunikation
intelligente Algorithmen in Echtzeit
vernetzen sich Fahrzeuge unterein-
die optimalen Fahrmanöver.
ander und mit der Infrastruktur,
um beispielsweise Informationen
über Staus oder Wetterdaten
auszutauschen.
ACTIVE SAFETY LAYER
Next Level Um Sicherheit beim autonomen Fahren
zu gewährleisten, setzt IAV auf eine
funktionale Mehrschichtarchitektur,
welche das System in einen Comfort
COOPERATIVE DRIVING
Layer und einen Active Safety
Automatisiertes Fahren bei IAV
Layer aufteilt.
Fahrzeuge und Infrastruktur tauschen
Informationen aus und interagieren
miteinander. Dadurch können
kritische Situationen vermieden oder
entschärft werden, beispielsweise das
OPTICAL COMMUNICATION
Durchführen eines Spurwechsels
oder das Einfädeln in den
Fahrzeug- und Verkehrsdaten werden
fließenden Verkehr.
bei spielsweise zwischen Lkws per
Lichtwellen übertragen – eine
störunempfindliche, abhörsichere
Methode, die außerdem einen hohen
Datendurchsatz ermöglicht.
VALET PARKING
Der Fahrer steigt aus und startet
den autonomen Parkvorgang,
worauf hin das Fahrzeug einen
freien Parkplatz ansteuert und
selbstständig einparkt.
8 Fokusthema | automotion automotion | Fokusthema 9
The HEAT is on
Erster Probebetrieb des autonomen Kleinbusses HEAT erfolgreich
in der Hamburger HafenCity durchgeführt
D
rei Wochen lang war der von IAV
und seinen Partnern gebaute au-
tonome Kleinbus HEAT (Hamburg
Electric Autonomous Transportation) in
der Hansestadt auf öffentlichen Straßen
unterwegs. Während des Tests erfüllte er
alle Erwartungen hinsichtlich Performance
und Sicherheit. Derzeit wird das Fahrzeug
für seinen nächsten Einsatz vorbereitet:
Im Februar soll es in einem größeren Ge-
biet mit höherer Geschwindigkeit fahren.
Mit maximal 15 Kilometern pro Stunde talliert, deren Messwerte drahtlos in das Straßenverkehrsordnung hielten, vor Her-
war HEAT in den ersten drei Augustwochen Fahrzeug übertragen wurden. „So konnte ausforderungen – zum Beispiel E-Roller,
in der Hamburger HafenCity unterwegs. HEAT besser in Kreuzungen hineinsehen die sehr flink und flexibel unterwegs waren.“
„Der Rundkurs um einen Häuserblock war und seine Fahrstrategie rechtzeitig anpas- An Bord des Kleinbusses waren Video-
vorgegeben, weil wir für das autonome sen“, erklärt Lemke. kameras installiert, um möglichst viele
Fahren eine Zulassung für bestimmte solcher Verkehrssituationen zu erfassen.
Straßenabschnitte beantragen müssen“, In dieser frühen Testphase war immer ein Die Aufnahmen werden jetzt in Simula-
berichtet Veit Lemke, Executive Project Fahrzeugbegleiter an Bord, der jederzeit tionen verwendet, um die autonomen
Manager bei IAV und HEAT-Projektleiter. einen Notstopp hätte auslösen und das Fahrfunktionen von HEAT weiter zu ver-
Neben den bordeigenen Sensoren lieferte Fahrzeug so zum Stehen hätte bringen bessern. Aus Datenschutzgründen wurden
die umgebende Infrastruktur Daten an den können. Als Fahrgäste waren Entwicklungs- dabei alle personenbezogenen Daten wie
Kleinbus: Projektpartner Siemens hatte ingenieure von IAV mit HEAT unterwegs, um Nummernschilder und Gesichter verfrem-
an Masten Radar- und Lidar-Sensoren ins- die technischen Systeme zu überwachen det. Für das autonome Fahren ist die exak- ausweichen und mussten so einen Not- die Lenkung des Kleinbusses angesteuert auf öffentlichen Straßen zu fahren – was
und Erkenntnisse für die Folgefahrten sowie te Positionsbestimmung des Fahrzeugs stopp durchführen. In Zukunft kann der werden. „Dabei handelt es sich um eine wir hier tun, hat deshalb Signalwirkung.“
für die nächste Entwicklungsstufe aus erforderlich. „Wir brauchen 15 Zentimeter Fahrzeugbegleiter auch im automatisierten abgesicherte Technologie, die sich schon
dem Fahrbetrieb zu ziehen. „Während einer Genauigkeit, sodass GPS hier nicht aus- Fahrbetrieb lenkend eingreifen.“ Bei den viele Jahre auf der Straße bewährt hat“, „Wir sind eine Gruppe von Partnern mit ei-
Demofahrt waren alle überrascht, wie un- reicht“, erklärt Lemke. „Darum haben wir nächsten Testfahrten sollen erstmals spe- sagt Dr. Manfred Kraus, Leiter Produktent- nem gemeinsamen Ziel: einen autonomen
gewohnt das autonome Fahren ist und mit in den drei Wochen eine hochaufgelöste ziell geschulte Fahrgäste an Bord sein. Nach wicklung Fahrwerksysteme bei Schaeffler Kleinbus zum ersten Mal im Stadtverkehr
wie viel Sorgfalt alles entwickelt wurde“, Karte des Gebietes aufgezeichnet und jedem Upgrade des Fahrzeugs ist eine neue Paravan Technologies. „Wir konnten auf einzusetzen“, sagt Schmidt. „Im Rahmen der
berichtet Stefan Schmidt, Bereichsleiter beispielsweise die Position bestimmter Prüfung durch den technischen Prüfdienst, viele Millionen gefahrene Kilometer verwei- künftigen Mobilität sind solche Lösungen
Project Management Office bei IAV. „Aber Landmarken wie Schilder oder Randstrei- die Dekra, gefordert und eine neue Zulas- sen, was wichtig für die Zulassung war.“ gerade für die letzte Meile interessant.“ Das
alle haben sich nach kurzer Zeit völlig sicher fen erfasst.“ sung von Seiten der Behörden erforderlich. Für die nächste HEAT-Generation wird das HEAT-Projekt liefert zudem wichtige Ein-
gefühlt – und waren umso entschlossener, Erst danach darf HEAT – mit einem regulä- Unternehmen ein neues Rolling Chassis mit sichten in die mobile Wertschöpfungskette
das Projekt zu einem Erfolg zu machen.“ Derzeit wird der HEAT-Kleinbus bei IAV auf ren Straßenkennzeichen ausgestattet – den Umfängen Antrieb, Lenkung, Bremse, – IAV erwirbt damit die Kompetenz, autono-
den nächsten Testlauf vorbereitet: Im Feb- wieder auf die Straße. Dämpfung und Radaufhängung beisteuern. me Fahrzeuge zu entwickeln und gegebe-
Viel gelernt in einem ruar 2020 soll er mit maximal 25 Kilometern Es wird ab dem zweiten Quartal 2020 zur nenfalls zu betreiben. Seinen ganz großen
dynamischen Umfeld pro Stunde in einem größeren Gebiet un- Bewährte Lösung für Drive-by-Wire Verfügung stehen und den Kleinbus in die Auftritt wird HEAT anlässlich des ITS-Welt-
terwegs sein. Neben Software-Updates Lage versetzen, seine Räder um 90 Grad zu kongresses im Oktober 2021 haben: Dann
Dazu werden auch die gesammelten Erfah- erhält er dafür auch neue Komponenten: Zu den IAV-Partnern beim HEAT-Projekt drehen und auf der Stelle zu drehen. „Das soll er mit bis zu 50 Kilometern pro Stunde
rungen beitragen. „Wir haben bei diesem „Wir bauen zum Beispiel einen verbesserten gehört auch Schaeffler Paravan Technolo- Projekt ist extrem spannend für uns, weil automatisiert durch die HafenCity fahren.
Test in einem sehr dynamischen Umfeld Joystick unseres Partners Schaeffler Pa- gies (SPT). Vom Weltmarktführer für behin- wir hier etwas völlig Neues schaffen“, so Dr.
viel gelernt“, so Lemke. „Neben der dichten ravan Technologies (SPT) für das manuelle dertengerechte Fahrzeuglösungen stammt Kraus. „Kein anderer schafft es bisher, mit Kontakt:
Bebauung stellten uns viele Verkehrs- Fahren ein“, sagt Lemke. „Bisher konnten die dreifach redundante Drive-by-Wire- einem automatisierten Kleinbus nach Level veit.lemke@iav.de
teilnehmer, die sich nicht exakt an die wir in einer Gefahrensituation nicht manuell Technologie, über die die Bremsen und 4 SAE mit bis zu 50 Kilometern pro Stunde stefan.schmidt@iav.de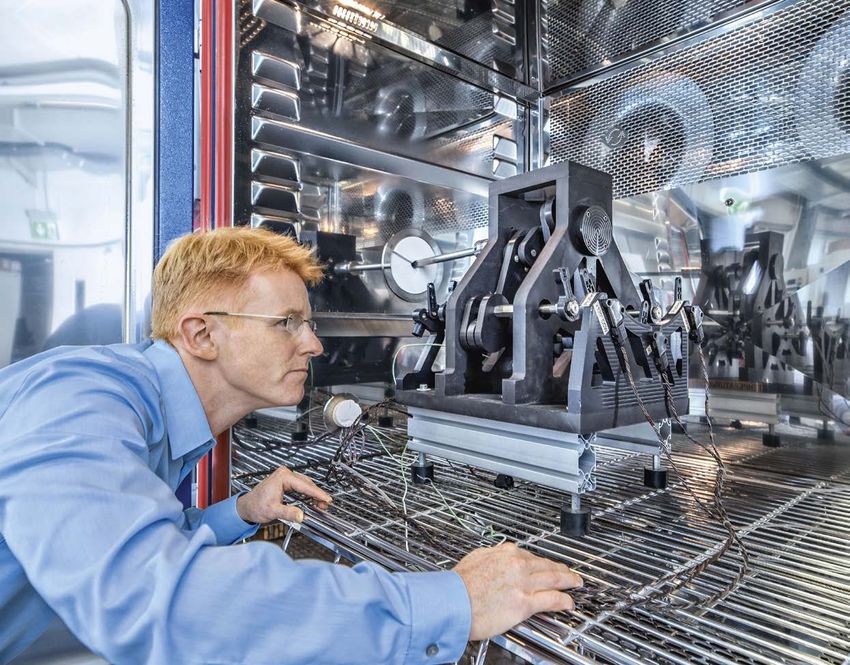
10 Fokusthema | automotion automotion | Fokusthema 11
Erster autonomer Shuttlebus
in Hamburg
Das Ziel im Forschungsprojekt HEAT ist die Integration
in den regulären Straßenverkehr
Projektpartner und
ihre Aufgaben
E
r ist da – der neue Kleinbus für HEAT machen wir deutlich, dass wir neue Mobili- Ausstattung des Fahrzeugs mit Kameras, Die Teststrecke in der Hamburger Hafen-
(Hamburg Electric Autonomous tätsangebote in Hamburg ausprobieren Radar und Lidar auch eine Ausrüstung City wird insgesamt 1,8 Kilometer lang sein. • Freie und Hansestadt Hamburg –
Transportation), das deutschland- wollen und der Industrie und Wissenschaft der Strecke mit zusätzlicher, intelligenter Im Gegensatz zu den ersten Planungen BWVI:
weit einmalige Forschungs- und Entwick- dafür optimale Bedingungen bieten. Beim Infrastruktur, unter anderem mit Sensorik- musste die Strecke aufgrund von Groß- Verkehrsplanung durch den
lungsprojekt. Fünf Meter lang, 4,5 Tonnen ITS-Weltkongress 2021 werden wir mit elementen und digitalen Kommunikations- bauprojekten in der HafenCity verkürzt Landesbetrieb Straßen, Brücken
schwer, elektrisch und damit emissionsfrei HEAT und vielen weiteren Projekten zeigen, systemen, notwendig. werden, was aber keinen Einfluss auf die und Gewässer (LSBG), Realisierung
angetrieben wird der Kleinbus ab Mitte dass Hamburg Vorreiter bei innovativen Forschungs- und Entwicklungsergebnisse und Betrieb erforderlicher Infra-
2020 bis zu zehn Fahrgästen Platz für die Mobilitätslösungen ist.“ Zusätzlich erfolgt eine Überwachung der des Projektes haben wird. Auf der Ge- struktursysteme durch Hamburg
Fahrt durch die Hamburger HafenCity Fahrzeugfahrt über die Leitstelle der samtstrecke steuert der Kleinbus fünf Verkehrsanlagen (HHVA), Sicherung
bieten. Der jüngste Spross der HOCH- Wesentliches Kennzeichen des HEAT- HOCHBAHN, die in Abhängigkeit von der Haltestellen an, davon drei reguläre HVV- rechtlicher Voraussetzungen durch
BAHN-Flotte soll dabei selbstständig Projektes ist ein stufenweises Vorgehen. jeweiligen Verkehrssituation dem Fahrzeug Haltestellen und zwei für HEAT neu einge- Behörde für Inneres und Sport
fahren. Um seinen Weg auf der Teststrecke In der ersten Phase, die mit dem Probebe- entsprechende Fahrbefehle geben kann richtete Haltestellen. (Landesbetrieb Verkehr)
sicher zu finden, empfängt das Shuttle trieb startete, gab es auf einer festgelegten und die in einer vom Leitstellenpersonal als
Informationen von der installierten Infra- Strecke einen Testbetrieb ohne Fahrgäste kritisch eingestuften Verkehrssituation ei- Der Testbetrieb ist hinsichtlich der Strecke • HOCHBAHN:
struktur und aus der Leitstelle. Parallel und mit einem professionellen Fahrzeug- nen Soforthalt auslösen und in Kontakt mit bewusst stufenweise angelegt, um auf den Konsortialführerin des Projektes,
sendet das Shuttle auch Informationen begleiter, der bei Bedarf unmittelbar ein- den Fahrgästen treten kann. Die Leitstelle einzelnen Stufen Erfahrungen zu sammeln administrative sowie fachliche
an die Leitstelle. greifen konnte. Ab Mitte 2020 sollen dann übermittelt auch den Fahrplan und die und darauf aufbauend die Strecke zu Leitung und Koordination des
auch erstmals Fahrgäste mitgenommen aktuell geplante Fahrstrecke an das Shuttle. verlängern, den Automatisierungsgrad Gesamtprojektes (mit Unterstüt-
Das Ziel des Forschungs- und Entwick- werden, ein Fahrzeugbegleiter wird weiter zu erhöhen und die Geschwindigkeit zu zung von hySOLUTIONS), Betriebs-
lungsprojektes HEAT ist absolutes Neuland an Bord sein. Bis zum ITS-Weltkongress Für den Start des Probebetriebs war zu- steigern. Der Umfang und die stufenweise konzept und praktischer Betrieb
und dementsprechend ehrgeizig: Es soll im Oktober 2021 soll dann der autonome nächst eine Straßenzulassung für ein voll- Entwicklung des Testbetriebs werden der autonom fahrenden Busse
erforscht und im Erfolgsfall nachgewiesen Betrieb (ohne Fahrzeugbegleiter) gemäß kommen neues Fahrzeug erforderlich, das dabei so ausgerichtet, dass stets eine
werden, dass selbstständig fahrende Klein- SAE Level 4 erfolgen. ganz andere Komponenten aufweist und auf höchstmögliche Sicherheit gewährleistet • IAV GmbH:
busse vollständig in den Straßenverkehr klassische Komponenten wie beispielswei- ist, wie sie der Zulassungsprozess vor- Fahrzeugentwicklung und -realisie-
und den ÖPNV einer Metropole integriert Der von IAV entwickelte Kleinbus ist aktuell se Lenkrad und Außenspiegel komplett ver- schreiben wird. rung; fahrzeugseitige Entwicklung
werden können. Das HEAT-Fahrzeug wird für zehn Fahrgäste zugelassen und hat zichten kann. Auch hier gilt der stufenweise der Technologie für das autonome
unter realen Bedingungen im öffentlichen zwei Sitzbänke mit je vier Plätzen sowie Ansatz, der die Entwicklung der jeweils Besondere Aufmerksamkeit im HEAT-Pro- Fahren
Straßenraum getestet und soll – so der eine klappbare Sitzbank mit zwei Plätzen. erforderlichen Genehmigungen und Zulas- jekt gilt den Menschen, für die das neue
Untersuchungsansatz des Projektes – mit Zusätzlich ist er mit einer Rampe ausge- sungen im Rahmen des Projektes vorsieht. Verkehrsangebot eines autonom fahren- • Siemens Mobility GmbH:
bis zu 50 km/h autonom fahren können. stattet, sodass ein barrierefreier Betrieb Die Genehmigung für den Probebetrieb im den Busses gestaltet wird. Die Nutzung des Konzeption und Weiterentwicklung
möglich ist. Die Aufladung der Batterien für August erhielt das Fahrzeug Mitte Juli. Busses soll einfach, angenehm und mit der straßenseitigen Infrastruktur
Michael Westhagemann, Hamburgs Sena- den Elektroantrieb erfolgt bei Vattenfall in einem hohen Sicherheitsgefühl verbunden der erforderlichen Leitstelle
tor für Wirtschaft, Verkehr und Innovation, der HafenCity. Die erforderliche rechtliche Begleitung des sein. Das Deutsche Zentrum für Luft- und
betonte bei der Fahrzeugpräsentation: HEAT-Projektes übernimmt das Institut für Raumfahrt (DLR) führt als Projektpartner die • IKEM – Institut für Klimaschutz,
„HEAT bietet der Stadt die Chance, das Neben dem eigens für dieses Projekt Klimaschutz, Energie und Mobilität (IKEM), Begleitforschung durch, ermittelt die Energie und Mobilität:
automatisierte und vernetzte Fahren selbst entwickelten Fahrzeug stehen vor allem das sich auch mit den daraus abgeleiteten Nutzeranforderungen und leitet Hinweise Untersuchung neuer Betreiber-
in allen Facetten zu erforschen. Dabei gilt Fragen nach der verkehrs- und informati- Anforderungen an das Fahrzeug, der Infra- für die Gestaltung der Fahrzeuge und des und Geschäftsmodelle, rechtliche
für uns: Safety first! Die Akzeptanz bei den onstechnischen Infrastruktur, der digitalen struktur und dem regelmäßigen Betrieb mit Verkehrsservice ab. Hinzu kommen die Begleitung für Genehmigungen
Menschen ist ein wesentlicher Faktor für Leittechnik und den technischen Schnitt- Fahrgästen befasst. Die Besonderheit beim Evaluation der Akzeptanz bei den Fahr- und Zulassungen
den künftigen Einsatz von autonomen stellen im Fokus des Forschungsprojekts. autonomen Fahren liegt darin, dass die gästen und die Untersuchung des Zusam-
Fahrzeugen. Mit der herstelleroffenen Für die Integration in den realen Straßen- Technik alle Aufgaben des Fahrzeugführers menwirkens weiterer Verkehrsteilnehmer • Deutsches Zentrum für Luft-
Teststrecke für automatisiertes Fahren und verkehr und die dafür notwendige Höchst- in Bezug auf die Einhaltung der Verkehrs- mit dem System im Erprobungsgebiet der www.hochbahn.de/heat
und Raumfahrt e.V. (DLR):
mit diesem autonom fahrenden Shuttle geschwindigkeit von 50 km/h ist neben der regeln übernehmen muss. HafenCity Hamburg. Durchführung Begleitforschung
12 Fokusthema | automotion automotion | Fokusthema 13
Sicher beim autonomen Fahren
Im Normalbetrieb befindet sich das System „Die Mehrschichtarchitektur trägt dazu bei, Layer führen. Für den Active Safety Layer
im Zustand komfortablen Fahrens, wobei die hohen Ansprüche an automatisierte wird mit dem Wasserfallmodell gearbeitet,
der Comfort Layer die Kontrolle über das Fahrfunktionen mit vertretbarem Entwick- um den hohen Sicherheitsanforderungen
System hat. Kommt es zu einer kritischen lungsaufwand zu erreichen“, so Dr. Roland an das Design und die Umsetzung Rechnung
Verkehrssituation, übernimmt der Active Kallweit, Abteilungsleiter Predictive Safety zu tragen. Dagegen kann der Comfort Layer
Safety Layer die Hoheit über das Fahrzeug bei IAV. Die Teilung in verschiedene Schich- mit agilen Methoden entwickelt werden,
Neue Software-Architektur adressiert die Herausforderungen und überführt es, beispielsweise durch ten erlaubt es, die jeweilige Entwicklung zu um schneller auf Trends und Kundenwünsche
Bremsen oder Ausweichen, wieder in einen fokussieren: Im Comfort Layer müssen zu reagieren sowie Funktionserweiterungen
für sicheres autonomes Fahren sicheren Zustand. Ist die Situation ent- kritische Szenarien nicht länger betrachtet schneller sichtbar zu machen.
schärft, kann in das komfortable Fahren werden, während im Active Safety Layer
zurückgewechselt werden. auf Komfortanforderungen verzichtet wer- „In Zukunft werden neue Entwicklungsme-
thoden und adäquate Designpattern für das
autonome Fahren immer wichtiger, um die
Kritische Schaden unvermeidbar, Sicherer Zustand
Fahrsituation sicherer Zustand nach Schadeneintritt Komplexität bewältigen zu können. Unsere
unerreichbar Aufgabe ist es, in der Forschung und Entwick-
lung hierfür die richtigen Antworten zu ge-
Steigende Kritikalität
ben“, so Dr. Matthias Butenuth, Fachbereichs-
Komfortables Vermeidung Schadens- Schadens-
leiter Automated Driving Systems bei IAV.
Fahren kritischer Situationen prävention minimierung
Comfort Layer Active Safety Layer
Vehicle-in-the-Loop
Das Verhalten des Active Safety Layers den kann. Dies führt insgesamt zu einer
hängt dabei von der jeweiligen Situation ab. Vereinfachung durch zwei schlankere Ent-
Auf einer Autobahn mit hohen Geschwin- wicklungsprozesse, wobei jeder die jeweils Reale Fahrsituationen mit
digkeiten kann ein Ausweichen sinnvoll für ihn passenden Entwicklungsmethoden virtuellen Szenen kombiniert
sein. Hierbei muss natürlich bewertet integrieren kann.
werden, ob dies auf einer freien Nebenspur Die Methode Vehicle-in-the-Loop
oder sogar innerhalb der Fahrspur möglich „Um die komplexen und sicherheitskriti- (ViL) verknüpft zur Funktionsaus-
ist. Betrachtet man dagegen ein autonomes schen Szenarien für den Active Safety Lay- legung und Validierung Simulatio-
Shuttle im Stadtverkehr, so lassen sich er in der Entwicklung zu berücksichtigen, nen mit dem realen Fahrzeug.
komplexe Szenarien mit unterschiedlichen setzen wir unter anderem auf neuartige Ein physisches Fahrzeug fährt
Verkehrsteilnehmern sowie ein- und aus- Entwicklungsmethoden wie beispielsweise in einer realen Testumgebung,
steigenden Fahrgästen besser mit einer Vehicle-in-the-Loop“, erklärt Paul Prescher, welche um virtuelle Objekte
Notbremsung entschärfen, da der zur Ver- Teamleiter Predictive Safety bei IAV. ergänzt wird. Diese virtuellen
fügung stehende Platz häufig zu gering ist. Objekte werden für den Testfahrer
Die verschiedenen Zielsetzungen können mithilfe von Augmented Reality
Mehrschichtarchitektur ermöglicht dabei auch zu unterschiedlichen Vorgehens- im Fahrzeug angezeigt.
differenzierte Entwicklung modellen für Comfort und Active Safety
Die Methode eignet sich beson-
ders für Szenarien, die zu komplex
I
oder gefährlich sind, um sie mit
n abrupten Gefahrensituationen müs- ben. „Sicherheit und unfallfreies Fahren
realen Verkehrsteilnehmern
sen in Sekundenbruchteilen die richti- gehören zu den größten Aufgaben, denen Comfort Layer
durchzuführen, beispielsweise
gen Entscheidungen getroffen werden, wir uns bei der Entwicklung unserer Sys- Sensoren Aktoren
bei hohen Geschwindigkeiten oder
um Unfälle zu verhindern. Menschen tun teme stellen müssen. In bereichsübergrei- Active Safety Layer
entgegenkommenden Fahrzeugen.
dies intuitiv durch ihre Erfahrung, autono- fenden Projekten haben wir ein umfassen-
Damit ermöglicht ViL eine gefahr-
me Fahrzeuge werden dies mindestens des Sicherheitskonzept erarbeitet“, erklärt
lose, ressourcenschonende und
ebenso gut leisten müssen. Dr. Ulrich Bauer, Entwicklungsingenieur Der Comfort Layer ist dabei der Teil, welcher
reproduzierbare Durchführung
Predictive Safety bei IAV. die komfortable Durchführung der jeweiligen
riskanter Szenarien.
Die Herausforderungen bei der Entwicklung automatisierten Fahraufgaben sicherstellt,
autonomer Systeme sind vielschichtig. Zum Das IAV-Sicherheitskonzept vom innerstädtischen Durchfahren einer
einen müssen die Systeme Sicherheit und Kreuzung bis hin zur Fahrt auf der Autobahn.
unfallfreies Fahren garantieren. Zum ande- Um die Sicherheit des autonomen Fahrens Der Active Safety Layer hat dagegen die Kontakt:
ren muss der Entwicklungsprozess immer zu gewährleisten, setzt IAV beim Sicherheits- Aufgabe, im akuten Notfall einzugreifen und ulrich.bauer@iav.de
komplexerer Funktionen bis hin zur Absi- konzept auf eine funktionale Mehrschichtar- dabei mit deutlich reduzierten Komfortan- matthias.butenuth@iav.de
cherung auch unter den hohen Sicherheits- chitektur, welche das System in einen Comfort forderungen angemessen auf die jeweilige roland.kallweit@iav.de
anforderungen weiterhin handhabbar blei- Layer und einen Active Safety Layer aufteilt. Gefahrensituation zu reagieren. paul.prescher@iav.de
14 Fokusthema | automotion automotion | Fokusthema 15
Pionierarbeit für
die Automatisierung
„Wir sehen, dass wir für Projekte wie HEAT „Wir benötigen Methoden und Prozesse, um Szenarienbasierte Entwicklung
neue Wege finden müssen, um derart kom- im virtuellen Raum Erkenntnisse zu gewin- und Validierung
plexe Funktionen wie das autonome Fahren nen und diese in allen Phasen zu nutzen.
von der Forschung in die Serie zu bringen. Eine Kernfrage ist: Wie machen wir die Um virtuelle Methoden sinnvoll über den
Das ist Neuland, das gibt es so bisher nicht Ergebnisse der verschiedenen Methoden gesamten Prozess einsetzen zu können und
in der Automotive-Welt. Bekannte konven- übertragbar? Wir haben noch ein gutes kompatible Ergebnisse zu erhalten, müssen
Simulative Funktionsentwicklung und Validierung für das autonome Fahren tionelle Methoden reichen hierfür nicht Stück vor uns, aber ohne einen derartigen vorab Szenarien und Modelle definiert
mehr aus“, sagt Dr. Matthias Butenuth, Prozess wird man autonome Fahrsysteme
als integrierter Prozess Fachbereichsleiter für Automated Driving nicht in Serie bringen können“, erklärt
werden, die in allen Entwicklungsphasen
genutzt werden können. Beispielhaft sei
Systems bei IAV. Thorsten Scheibe, Abteilungsleiter Simu- das Überholen eines anderen Fahrzeugs
lation & Validation bei IAV. Denn nur, wenn oder das Rechtsabbiegen an einer Ampel
D
er autonom fahrende Kleinbus auf öffentlichen Straßen zu transportieren. kehr realisiert werden soll. Die Entwicklung Die Anforderungen an Sicherheit, Zuver- die Ergebnisse zwischen den Entwick- mit Fahrradstreifen genannt. Im Lauf des
HEAT hat in der Hamburger Hafen- Das Forschungs- und Entwicklungsprojekt vernetzter, autonomer Fahrzeuge wie lässigkeit, Robustheit und Verfügbarkeit lungsschritten und Methoden übertragbar Entwicklungsprozesses wird das Set an
City seinen Testbetrieb aufge- von IAV und anderen Partnern gehört zu HEAT stellt neuartige, hohe Anforderun- autonomer Fahrsysteme sind immens. Die sind und in die Gesamtentwicklung einflie- relevanten Szenarien und zugehörigen
nommen. Ziel des ehrgeizigen Projekts: den weltweit ersten, bei denen das auto- gen an die Ingenieursleistung. Entwicklungsumfänge und die notwendige ßen, können die Anzahl der real gefahrenen Parametern kontinuierlich ausspezifiziert und
Passagiere ohne Fahrer mit bis zu 50 km/h nome Fahren im öffentlichen Straßenver- Anzahl der gefahrenen Test-Kilometer Kilometer sowie der Anteil an komplexen erreicht so einen sehr hohen Reifegrad. Die
würden zu unrealistisch langen Entwick- Methoden reduziert und der Entwicklungs- Szenarien werden in einer speziellen Szena-
lungszeiten und -kosten führen. aufwand insgesamt in einem realistischen rien-Datenbank vorgehalten, auf die die ver-
Rahmen gehalten werden. schiedenen virtuellen Methoden zugreifen.
Integrativer Gesamtentwicklungs-
prozess HEAT als Prozess-Prototyp Virtuelle Modelle
Die Lösung, um die Aufwände in einem ver- Für HEAT entwickelt IAV ein entsprechen- Um reale Gegebenheiten in Simulationen
tretbaren Rahmen zu halten, ist der Einsatz des Konzept, das im Verlauf des Projekts abzubilden, werden diese in Modellen
unterschiedlichster virtueller Methoden weiter ausdefiniert und in die Praxis abstrahiert – beispielsweise Modelle von
über den gesamten Entwicklungsprozess, umgesetzt wird. Das IAV-Konzept baut Sensoren, um deren Funktions- und Sys-
von der Funktionsspezifikation bis hin zur auf verschiedene Module: temverhalten abzubilden oder auch Verhal-
Validierung der Umsetzung. tensmodelle von Verkehrsteilnehmern.
• simulative Methoden, Die Komplexität der Modelle ist anpassbar
• szenenbasierte Entwicklung und an die Ziele der Entwicklungsphasen und
Validierung sowie an die jeweils eingesetzte Methode. Die
• virtuelle Modelle. Modellnachsteuerung über den Entwick-
lungsprozess wird mittels konkreter Per-
Diese Module müssen intelligent kombiniert formanceindikatoren sowie statistischer
und ganzheitlich in den gesamten Entwick- Methoden ermöglicht.
lungsprozess integriert werden. Dazu müs-
sen Schnittstellen und Abläufe definiert Auch die Modelle werden in einer zentralen
sein und Standards eingehalten werden. Modell-Datenbank in abstrakter Beschrei-
bungsform vorgehalten und können mit
Methodische Vielfalt verschiedenen Simulations-Tools genutzt
werden. „Unser Ziel ist, den kompletten
Virtuelle Methoden kommen in allen Phasen Entwicklungsprozess zu automatisieren,
zum Einsatz; so werden abstraktere ge- einschließlich der abschließenden Validie-
nutzt, um große Parameterräume zu vali- rung. Dafür gibt es bisher keine Norm.
dieren und einzugrenzen sowie komplexere Das Projekt HEAT bietet uns die große
zur Bewertung von Corner Cases. Im frühen Chance, das Konzept zu definieren und
Entwicklungsstadium unterstützen simula- zu erproben und damit Pionierarbeit zu
tive Validierungsmethoden wie Concept- leisten“, so Butenuth.
in-the-Loop oder Vehicle-in-the-Loop die
Definition valider Anforderungen sowie die Kontakt:
Prozesse der sicheren Auslegung wie matthias.butenuth@iav.de
Safety of the Intended Function (SOTIF) und thorsten.scheibe@iav.de
Funktionale Sicherheit. Die Funktionsent-
wicklung mittels Rapid Prototyping und eine
frühzeitige Validierung der technischen
Lösungen werden zum Beispiel mittels
Model-in-the-Loop gefördert.
16 Fokusthema | automotion automotion | Fokusthema 17
Forschen, fördern und vernetzen
Forschungsprojekte fördern den Know-how-Aufbau und die Vernetzung
der Branchen
W
as sind die großen Fragen, Her- Laufzeit: 10/2016 bis 10/2019 Intelligente Verkehrssysteme in Sachsen“. Ziel des Projektes ist es, wiederkehrende Geschäftsmodelle und Herausforderungen
ausforderungen und Probleme https://www.synchrone-mobilitaet.de/ Partner: BMW AG, Fraunhofer-Gesellschaft Fahrten in bekannten Gebieten zu automati- werden sich sowohl im Individual- als auch
unserer Zeit? Welche Diszipli- e.V., IVM Institut für Vernetzte Mobilität sieren und insbesondere Lösungsansätze im Güterverkehr ergeben. Das Forschungs-
nen und Fachrichtungen sind relevant? gGmbH, MUGLER AG, Noritel Mobile Kom- für kooperative Manöver in solchen Gebieten projekt PAVE (Potenziale automatisierter Ver-
Welche Partnerschaften und Kooperatio- munikation GmbH, Preh Car Connect GmbH, zu präsentieren. Hierzu arbeiten die Projekt- kehrssysteme) hat sich zum Ziel gesetzt, auf
nen versprechen Erfolg? Gemeinsam mit Technische Universität Chemnitz, Techni- partner an der Umsetzung in einem anwen- Basis des heutigen Mobilitätsverhaltens und
Partnern aus Wissenschaft und Wirtschaft AULA sche Universität Dresden, Vodafone GmbH dungsnahen Testfeld. Übergeordnete Ziele von Transportaufgaben im urbanen Raum
entwickelt IAV Lösungen, die die Welt von des Projektes, die insbesondere auf Real- • Visionen zukünftiger Verhaltens- und
morgen und übermorgen prägen werden. AUtonome Elektrofahrzeuge mit automa- Gefördert von: BMVI – Bundesministerium fahrzeugen umgesetzt werden sollen, sind: Organisationsformen durch autonom
tischer LAdetechnologie für Verkehr und digitale Infrastruktur • Schaffung von einheitlichen Software- fahrende Fahrzeuge zu entwickeln
Aus Forschungs- und Entwicklungspro- HarmonizeDD frameworks für die unterschiedlichen • Anforderungen an Fahrzeuge abzuleiten
jekten, an denen Partner aus verschiede- In den nächsten Jahren sollen in einigen Laufzeit: 04/2017 bis 10/2019 Anforderungen des hochautomati- • neue Organisations- und Dienstformen
nen Disziplinen und Branchen miteinander Städten weltweit fahrerlose Pkw und Klein- Um den vielfältigen, wechselseitigen Stör- https://www.synchrone-mobilitaet.de/ sierten Fahrens zu entdecken
arbeiten, ergeben sich oftmals neue busse als Taxi eingesetzt werden. Diese einflüssen im urbanen Mischverkehr entge- • Transfer von Know-how und • ihre Wirkung auf das Verkehrssystem,
Erkenntnisse zu einem wichtigen oder be- Fahrzeuge sollen aus Umwelt- und Nach- genzuwirken, entstanden im Projekt Harmo- Algorithmen aus der Raumfahrt für Umwelt und Sicherheit abzuschätzen
sonders aktuellen Thema. „Für IAV ist die haltigkeitsgesichtspunkten mit rein elek- nizeDD neuartige Funktionen und Dienste für das hochautomatisierte Fahren sowie und zu bewerten
Beteiligung an Forschungsprojekten ein trischen Antriebssträngen ausgestattet automatisierte und konventionelle Fahrzeu- Definition von Anforderungen an
wichtiger Beitrag zur nachhaltigen Weiter- werden. Für eine umfassende Automatisie- ge. Für flächendeckende Basisdienste dien- die moderne Satellitennavigation Die Betrachtung erfolgt im Sinne eines
entwicklung zukunftsweisender Themen“, rung des Betriebs derartiger E-Taxis muss te eine Mobilfunk- und Edge-Cloud-Lösung. • Entwicklung effizienter KI-Algorithmen Marktmodells, das analysiert, welche Leis-
sagt Michael Aengenheister, Koordinator die Herausforderung der vollautomatischen Für einen erweiterten Funktionsumfang auf für das hochautomatisierte Fahren tungen durch ein System des Automati-
der FuE-Projekte bei IAV. „Von dem in Nachladung ohne manuellen Eingriff eines bestimmten Korridoren kamen zusätzlich sierten-Vernetzten-Fahrens (AVF-System)
den Forschungsprojekten gewonnenen Bedieners bewältigt werden. Cloud-Lösungen in Roadside Units zum IAV ist im Projekt für die Themenbereiche möglich werden, welche Bedarfe und
Know-how profitieren wir bei unseren Einsatz. Auf Fahrzeugseite entstanden Funk- Entscheidungsfindung, (modellbasierte) Nachfragen es geben wird und für welche
Kundenaufträgen und bringen unser Im Projekt AULA sollten in den Kernbe- tionen, die es erlauben, diese Dienste sowohl OPA3L Bewegungsplanung und (modellbasierte) Systemausprägungen, Dienste und Fahr-
Engineering- und Technologie-Know-how reichen automatische Fahrfunktionen, in den automatisierten Fahrprozess als auch Fahrdynamikregelung verantwortlich. zeuge eine hohe Akzeptanz zu erwarten ist.
in neue Branchen als Lösungen für das Schnellladesysteme und Automatisierung in nichtautomatisierte Fahrzeuge über neue Optimal assistierte, hoch automatisierte,
gesamte Mobilitäts-Ökosystem ein“, so der Nachladung von Fahrzeugen signifikan- Interaktionsmechanismen einzubeziehen. autonome und kooperative Fahrzeug- Partner: Universität Bremen, Universität Aufgabe von IAV im Projekt PAVE ist die
Aengenheister. Aktuell ist IAV an über 40 te technische Fortschritte erarbeitet Die Ansätze wurden im Digitalen Testfeld navigation und Lokalisation der Bundeswehr München, ANavS GmbH, inhaltliche und methodische Unterstützung
FuE-Projekten beteiligt. werden, die nach Projektende zu zulas- Dresden/Sachsen experimentell untersucht. IAV GmbH bei der Erarbeitung von Zukunftsbildern
sungsfähigen, seriennahen Produkten der OPA3L konzentriert sich auf die Über- zum automatisierten Fahren und die Beglei-
Ein großes Thema der aktuellen Forschung beteiligten Projektpartner führen. IAV entwickelte neue Fahrzeugfunktionen tragung von Weltraum-Know-how in den Gefördert von: BMWi – Bundesministerium tung der Entwicklung von Anforderungen
und Entwicklung ist das automatisierte für das kooperative automatisierte Fahren Bereich des hochautomatisierten Fahrens für Wirtschaft und Energie an Fahrzeuge und Systeme.
Fahren. IAV ist mit verschiedenen Partnern Gesamtziel des Projekts AULA ist die Ent- im innerstädtischen Mischverkehr. Einen und will dies für die Mobilität 4.0 in Deutsch-
an den folgenden öffentlich geförderten wicklung eines vollautomatisch agierenden, Schwerpunkt bildeten hierbei Entschei- land nutzbar machen. Die Kerninhalte der Laufzeit: 03/2019 bis 02/2023 Partner: INA – Internationale Akademie
Projekten beteiligt elektrisch angetriebenen Pkw, dessen funk- dungsmechanismen zur Interaktion mit autonomen Planung, Navigation sowie Berlin für innovative Pädagogik, Psycholo-
tional sichere, vollautomatische Schnellla- Verkehrsteilnehmern unterschiedlicher der Flugbahnoptimierung und -steuerung gie und Ökonomie gGmbH, Robert Bosch
dung im teilöffentlichen Raum ohne Nutzer- Automatisierung und Konnektivität, die dienen als Grundlage für die Anwendung GmbH, Technische Universität Berlin,
eingriff sowie die Entwicklung seriennaher unter anderem auch die Mobile- und von autonomen Fahrzeugen. OPA3L baut Otto-von-Guericke-Universität Magdeburg
Soft- und Hardware-Komponenten des Roadside-Unit-Clouddienste einbezogen. auf dem bereits geförderten Projekt PAVE
Fahrzeugs, des Kontaktsystems sowie der Die entstandenen Funktionsmuster wur- „AO-Car“ auf, bei dem IAV beteiligt war, Gefördert von: BMVI – Bundesministerium
damit verbundenen Sicherheitssysteme. den in Versuchsfahrzeuge integriert und und erweitert die Forschungsfragen durch Potenziale automatisierter Verkehrssys- für Verkehr und digitale Infrastruktur
gemeinsam mit den anderen Partnern bei Einbeziehung von Industriepartnern auf teme
Partner: Fraunhofer-Institut für Verkehrs- Versuchsfahrten im realen Straßenverkehr reale Anwendungsszenarien. Die hierzu Laufzeit: 10/2018 bis 12/2020
und Infrastruktursysteme, IAV GmbH getestet und evaluiert. erforderliche Navigation umfasst insbeson- Es ist davon auszugehen, dass sich in naher https://www.bmvi.de/SharedDocs/DE/
dere die wichtigen Punkte der Lokalisation, Zukunft das Mobilitätsverhalten, die Mobi- Artikel/DG/AVF-projekte/pave.html
Gefördert von: Das Projekt ist eingebettet in die sächsi- der optimalen Routenbestimmung sowie litätsorganisation und die Verkehrsorgani-
SAB Sächsische AufbauBank sche Initiative „Synchrone Mobilität 2023 – der aktiven Steuerung. sation signifikant verändern werden. Neue
automotion | Fokusthema 19
Von Assistenz
bis Automatisierung
Wir entwickeln, was bewegt.
allem durch ein Zusammenspiel von Änderungen im Straßenraum – etwa
Mit aktiver Sicherheit und intelligenten Funktionen einen Schritt voraus. Bereits seit zwei Jahrzehnten treiben
Ressourcenmanagementsystemen, Fah- durch Baustellen oder auf der Fahrbahn
wir die Vision vom hochautomatisierten Fahren voran und entwickeln vernetzte Funktionen und Gesamt-
rerassistenzfunktionen und Systement- parkende Autos – werden sofort erkannt
systeme vom Konzept bis zur Serie. Als einer der führenden Entwicklungspartner der Automobilindustrie
wicklung zu erlangen. und an alle vernetzten Fahrzeuge im
bietet IAV mehr als 30 Jahre Erfahrung und ein unübertroffenes Leistungsspektrum. Mit Leidenschaft und
Umkreis weitergeleitet. Dazu sollen die
der Kompetenz für das ganze Fahrzeug realisieren wir Lösungen in technischer Perfektion. Hersteller und
Partner: Fraunhofer-Institut für Verkehrs- vernetzten Fahrzeuge auch Informationen
Zulieferer unterstützen wir weltweit mit mehr als 6.500 Mitarbeitern und einer erstklassigen Ausstattung bei
und Infrastruktursysteme IVI, NXP Semi- über freie Parkplätze am Straßenrand
der Realisierung ihrer Projekte – von Umfeldsensorik und Algorithmik bis Simulation und Fahrzeugintegration:
Ihre Ziele sind unser Auftrag.
REMAS conductors Germany GmbH, MUGLER AG, liefern und bestimmte Objekte wie Laternen
IVM Institut für Vernetzte Mobilität gGmbH, oder Straßenschilder erkennen und deren
Ressourcenmanagementsystem für hoch- TechniSat Digital GmbH, dresden elektronik Position gegebenenfalls aktualisieren.
Mehr dazu und zu unserer einzigartigen Kompetenzbreite erfahren Sie auf www.iav.com
automatisierte urbane Verkehre verkehrstechnik gmbh, FSD Fahrzeugsys-
temdaten GmbH, Technische Universität IAV war bei dem Projekt für die Kommuni-
Die Anforderungen auf den Gebieten Auto- Chemnitz, Professur für Nachrichten- kation zwischen Fahrzeugen und Backend
motive, Verkehrstechnik, Informations- und technik, Technische Universität Dresden, sowie für die Aktualisierung der Karten
Kommunikationstechnologie sowie Infor- Lehrstuhl für Fahrzeugmechatronik und auf dem Backend verantwortlich. Weitere
matik sind komplex; die Entwicklungsakti- Lehrstuhl für Verkehrsleitsysteme und Arbeitsschwerpunkte von IAV waren die
vitäten vieler Akteure aus diesen Bereichen -prozessautomatisierung, IAV GmbH V2X-Kommunikation zum Austausch von
müssen zusammengeführt und Lösungen Gefahrenwarnungen sowie die Infrastruk-
gemeinsam simuliert und erprobt werden. Gefördert von: turkommunikation zwischen Fahrzeug und
SAB – Sächsische AufbauBank Ampel mittels 802.11p-Technologie (Wi-Fi).
Eine interdisziplinäre Zusammenführung
darauf aufsetzender Entwicklungsaktivitä- Laufzeit: 09/2015 bis 08/2019 Partner: Senatsverwaltung für Umwelt,
ten, aber auch von Erprobungsmaßnahmen https://www.synchrone-mobilitaet.de/ Verkehr und Klimaschutz Berlin, Hella
in Testkorridoren, erfordert eine adäquate Aglaia Mobile Vision GmbH, IAV GmbH,
Verknüpfung dieser Ressourcen. Das Pro- Daimler Center for Automotive Information
jekt REMAS adressierte diese Heraus- Technology Innovations (DCAITI), Fraun-
forderung und legte hierfür die wissen- hofer-Insitut für Offene Kommunikations-
schaftlich-technischen Grundlagen im SAFARI systeme FOKUS, Freie Universität Berlin,
Kontext hochautomatisierter urbaner Senatsverwaltung für Wirtschaft. Energie
Verkehre. Hierzu zählen Verfahren zur Inte- Sicheres automatisiertes und vernetztes und Betriebe, Bezirksamt Reinickendorf,
gration derartiger Ressourcen über eine Fahren mit selbst-aktualisierenden Karten Deutsche Telekom
neue Simulations-Middleware, zur Unter- im Testfeld Berlin Reinickendorf
stützung und Echtzeitkoordination von Gefördert von:
Fahrten und Fahrmanövern sowie zur Zielsetzung des Projektes war die Entwick- BMVI – Bundesministerium
Überwachung von kritischen Systemeigen- lung und praktische Erprobung des Zu- für Verkehr und digitale Infrastruktur
schaften. Ein neuartiges Informations- sammenspiels von automatisierten und
modell ist Kern einer Kooperationsplatt- vernetzten Fahrzeugen und kooperativer Laufzeit: 06/2017 bis 06/2019
form mit einer Anbindung an das reale Infrastruktur. Es geht um hochpräzise und www.testfeld-berlin.de
Verkehrssystem und die in den Entwick- sich selbst aktualisierende digitale Karten,
lungsprozess eingebundenen Werkzeuge, die von den Fahrzeugen und Smartphones
Fahrzeuge und Komponenten. gespeist werden.
Basierend auf durchgeführten Technolo- Der zentrale Ansatz von SAFARI liegt in
gieanalysen zeigte sich, dass weitere der Annahme, dass die meisten Fehler
Fortschritte vor allem auf dem Gebiet der systematisch sind und von automatisierten
intelligenten Verkehrssysteme nötig sind. und vernetzten Fahrzeugen erfahren, er-
Ein technologischer Vorteil ist somit vor lernt und vorhergesagt werden können.20 Fokusthema | automotion
SecVI SYNCAR
Security for Vehicular Information – eine des Fahrzeugherstellers ergänzt, um auch Ziel des Vorhabens SYNCAR war es, neuar-
Sicherheitsarchitektur für Fahrzeugnetz- kurzfristig Updates für eine Fahrzeugflotte tige Lösungen für ein vorausschauendes,
werke einspielen zu können. automatisiertes Fahren unter kooperativer
Abstimmung mit anderen Verkehrsteil-
Um autonomes Fahren zu ermöglichen, Auf der Basis realer Anwendungsdaten nehmern und Lichtsignalanlagen zu entwi-
müssen innovative Fahrerassistenzsyste- werden im Projekt Verfahren entwickelt ckeln. Hierbei ist unter anderem auch eine
me mit allen dafür notwendigen Informati- und in einem Demonstrationsfahrzeug neuartige Form der Optimierung des Ver-
onen ausgestattet werden. Mit der zuneh- evaluiert, die das autonome Fahren deutlich kehrsprozesses entstanden, indem gezielt
menden Vernetzung von Fahrzeugen und sicherer machen sollen. konkrete Fahrempfehlungen (Manöver-
Infrastruktur entstehen neue Angriffsmög- empfehlungen) für bestimmte Fahrzeug-
lichkeiten für nicht autorisierte Zugriffe auf Partner: gruppen oder auch einzelne Fahrzeuge
Werde
Daten und Programme. Sicherheitslösun- Hochschule für Angewandte Wissenschaf- zur Verfügung gestellt wurden.
gen stehen daher in einem permanenten ten Hamburg, easycore GmbH, IAV GmbH
Wettlauf mit Angriffstechnologien. Bei der Neben der Leitung des Verbundprojektes
Abwehr derartiger Angriffe geht es um den Gefördert von: entwickelte IAV im Projekt neue Funktionen
Schutz der Fahrzeuge und ihrer Systeme, BMBF – Bundesministerium für die hochautomatisierte Fahrzeug-
FahrspaßTester
der gesammelten Daten sowie auch um den für Bildung und Forschung führung und bezog dabei Verfahren für
Schutz aller Verkehrsteilnehmer. ein vorausschauendes Fahren, eine koo-
Laufzeit: 04/2018 bis 03/2021 perative Abstimmung des Fahrverhaltens
Die Partner des Projektes haben sich zum http://secvi.inet.haw-hamburg.de/ mit der Umgebung sowie die Berücksich-
Ziel gesetzt, eine robuste und niedrigkom- tigung von Fahrempfehlungen ein.
plexe Netzwerkarchitektur zu entwickeln,
die die Sicherheit der Nachrichtenflüsse in Partner:
den Steuerungsbereichen des Fahrzeugs dresden elektronik verkehrstechnik gmbh,
auf verschiedenen Ebenen überwacht und Fraunhofer-Institut für Verkehrs- und Infra-
gegen Angriffe abschirmt. Die neue Netz- struktursysteme, FSD Fahrzeugsystemda-
werkarchitektur soll mit den bestehenden ten GmbH, FusionSystems GmbH, Preh Car
Kommunikationstechnologien im Fahrzeug Connect GmbH, Technische Universität
harmonieren. Auch wenn die robuste Chemnitz, Technische Universität Dresden,
Heute Technologien von morgen testen!
Netzwerkarchitektur viele Angriffsmuster IAV GmbH
aushebelt, ist es notwendig, Angriffe und
Bedrohungen möglichst früh zu erkennen Gefördert von:
und darauf mit entsprechenden Sicher- SAB – Sächsische AufbauBank
heitsupdates kurzfristig zu reagieren. Um Hast Du Lust, etwas Aufregendes zu erleben? Werde Teil der mobilen
dies zu ermöglichen, werden neue Zusatz- Laufzeit: 09/2016 bis 12/2019 Zukunft! Freue Dich schon jetzt auf besondere Erlebnisse mit Virtual Reality Jetzt registrieren
funktionen entwickelt, die auf den vorhan- https://www.synchrone-mobilitaet.de/ (VR) und Augmented Reality (AR). Wir bieten Dir exklusive Einblicke in die und Tester werden:
denen fahrzeugspezifischen Komponenten de/projekte/syncar.html Automobilindustrie und die Zukunft der Mobilität.
www.ready2test.de
aufbauen. Die neuen Funktionen werden
Als Dankeschön vergüten wir selbstverständlich Deinen Einsatz.
zusätzlich durch die Cloud-Infrastruktur22 Impulse | automotion automotion | Impulse 23
Den Blick im Blick
Gut geprüft: IAV testet die Funktionen neuer Infotainmentsysteme gemäß den Vorgaben von NHTSA und JAMA
U
naufmerksame Fahrer verursachen ganz genau zusieht – und zwar beim Sehen. Bevor ein neues Infotainmentsystem in den teren Kamera das Blickfeld der Testperso- Bei der Auswahl der Probanden gelten
viele schwere Unfälle. Die amerika- Denn wer hier als Proband Platz nimmt, soll USA auf dem Markt kommen darf, muss es nen filmt. „So sehen wir genau, wie lange genaue Vorgaben: Unter ihnen müssen Ready2Test
nische Straßenverkehrsbehörde einen Beitrag zu mehr Verkehrssicherheit darum den NHTSA-Test bestehen. Im Gif- der Fahrer bei verschiedenen Use Cases jeweils zwölf Männer und zwölf Frauen sein.
NHTSA und der japanische Autoherstel- leisten. Genauer: Mithilfe ihrer „Sitzkiste“ horner Simulator bauen die IAV-Experten wo hinschaut – etwa bei der Eingabe einer Pro Geschlecht fordert die NHTSA jeweils
Die Komplexität der Automobiltech-
lerverband JAMA schreiben für die Funk- testen die Ingenieure, ob der Fahrer durch dafür auf Basis von CAD-Daten des Her- Telefonnummer während der Fahrt“, sagt drei Personen im Alter von 18 bis 24, 25 bis
nologie nimmt stetig zu. Was ist eine
tionen von Infotainmentsystemen darum die Bedienung des Infotainmentsystems zu stellers ein Cockpit nach, das ergonomisch Daniel Nause, Ingenieurpsychologe bei IAV. 39, 40 bis 54 sowie 55 Jahren und älter.
perfekte Kombination aus Design,
genau vor, wie sehr sie ihre Nutzer während stark vom Verkehrsgeschehen abgelenkt dem späteren Serienstand entspricht. Auf „Typische weitere Testfälle sind eine Ver- Alle müssen bei guter Gesundheit, aktive
Ergonomie, Haptik und Qualität?
der Fahrt ablenken dürfen. Im UX Lab in wird. Solche Untersuchungen sind von der den Leinwänden vor sich sehen die Proban- änderung der Kartenskala, die Zieleingabe Fahrer (mindestens 3.000 Meilen pro Jahr),
Wie können Mobilität und Kommuni-
Gifhorn testen IAV-Experten in einem amerikanischen Straßenverkehrsbehörde den eine amerikanische Straßenszene, oder das Blättern in der Kontaktliste auf erfahren im Umgang mit modernen Touch
kation zusammenwachsen? Wie sehen
Simulator, ob die Vorgaben erfüllt sind. NHTSA vorgeschrieben – nicht zuletzt, inklusive der dort üblichen Straßenmarkie- dem Display.“ Devices und natürlich unvertraut mit dem
Bedienkonzepte der Zukunft aus? Um
weil in den USA allein 2017 mehr als 3.166 rungen und Verkehrszeichen. Dabei tragen neuen Infotainmentsystem sein. Für die
diese Fragen beantworten zu können,
Im Gifhorner UX Lab von IAV steht ein Fahr- Menschen durch unaufmerksame Auto- sie eine Spezialbrille, die mit zwei Kameras Maximal erlaubte Ablenkung Rekrutierung der Testpersonen greift IAV auf
müssen vor allem auch Autofahrer und
simulator, der den Menschen am Steuer fahrer getötet wurden. die Augenbewegungen und mit einer wei- ist genau definiert externe Agenturen, aber zunehmend auch
Interessierte in die Entwicklung mit
auf einen eigenen Probandenpool zurück,
einbezogen werden. Deshalb hat IAV
Bestanden hat ein Infotainmentsystem, der aus 400 Mitarbeitern und 300 externen
Ready2Test ins Leben gerufen.
wenn wenigstens 21 von 24 Probanden Personen besteht (Tendenz steigend).
während des gesamten Bedienvorgangs
ihren Blick weniger als zwölf Sekunden von Sie können auch an den Tests teilnehmen, Müssen für die Teilnahme
der Straße abwenden mussten. Außerdem die der japanische Autoherstellerverband bestimmte Voraussetzungen
muss die durchschnittliche Dauer der JAMA vorgibt und die IAV ebenfalls in Gif- erfüllt sein?
einzelnen Ablenkungen bei ihnen unter zwei horn durchführt. Für diese sind jeweils zehn Wer experimentierfreudig ist und
Sekunden liegen. Und schließlich dürfen Männer und Frauen im Alter von 20 bis 49 Lust mitbringt, sich in technologische
nicht mehr als 15 Prozent ihrer Blickab- Jahren vorgeschrieben. Auch hier geht es Fragestellungen einzudenken, ist bei
schweifungen länger als zwei Sekunden um die Ablenkung durch Displays im Auto Ready2Test genau richtig. Jede
gedauert haben. All das lässt sich mit der während der Fahrt. Bei den JAMA-Tests Person ab 18 Jahren, mit oder ohne
Kamerabrille exakt erfassen. Fällt eine kommt ausschließlich die Okklusions- Führerschein, kann mitmachen.
Funktion durch, muss sie im späteren Brille zum Einsatz. Außerdem gelten ande-
Serienfahrzeug beispielsweise während re Grenzwerte als bei der NHTSA: Die Brille Wie läuft das ab?
der Fahrt gesperrt werden. gibt den Blick für 1,5 Sekunden frei und Wenn für einen bestimmten Nutzertest
versperrt ihn danach für eine Sekunde. Probanden benötigt werden, lädt IAV
Ein anderes Testverfahren ist das „Occlu- Dieses Muster wiederholt sich, und die die passenden Personen per E-Mail
sion Testing“, bei dem man ohne Simulator Probanden müssen die Aufgabe in höchs- ein. Wer ausgewählt wird, muss für
auskommt. Statt einer Kamerabrille tragen tens 7,5 Sekunden „Offenzeit“ bewältigen. einige Stunden bei IAV vor Ort sein.
die Probanden hier eine Brille, die mithilfe Anschließend bewerten sie auf einer Skala Möglich sind Online-Tests oder
eines Flüssigkristall-Displays die Sicht ent- von eins bis sieben, wie sehr sie der gesam- klassische Befragungen, aber auch
weder freigeben oder versperren kann. te Bedienvorgang gestresst hat. Tests im Fahrzeug. Besonders span-
Für den NHTSA-Test wird sie in 1,5-Sekun- nend ist der Einsatz von Virtual Reality
den-langen Intervallen auf transparent „Mit den NHTSA- und JAMA-Tests tragen (VR) und Augmented Reality (AR). So
geschaltet, und die Testpersonen müssen wir zur Verkehrssicherheit bei“, so Nause, werden simulierte Fahrsituationen
in diesen Zeitschlitzen die Funktionen des der sich seit vier Jahren mit dem Thema erlebt oder ein neues Head-up-Display
Infotainmentsystems bedienen. Bestanden beschäftigt. „Wir können sie in Deutschland getestet. Als Dankeschön wird der
hat es, wenn wieder mindestens 21 von oder in den Zielländern USA und Japan Einsatz selbstverständlich vergütet.
24 Probanden höchstens zwölf Sekunden durchführen.“ Wo auch immer der IAV-
„Offenzeit“ (aufsummierte Summe der Simulator zum Einsatz kommt: Er hat den
Offen-Intervalle) dafür brauchen. Blick der Probanden immer fest im Blick. Jetzt als FahrspaßTester
registrieren!
IAV stellt die geforderten Kontakt: www.ready2test.de
Probanden zusammen daniel.nause@iav.deSie können auch lesen