Robotik Konzepte der Eventkalender & Aktuelles Wege zum erfolgreichen Mathe-Abitur Bots vs. Corona - Technik in Bayern
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

NACHRICHTEN AUS TECHNIK, NATURWISSENSCHAFT UND WIRTSCHAFT
02/2021 MÄR/APR
Das Regionalmagazin für und
Konzepte der
Robotik
Eventkalender & Aktuelles
Wege zum erfolgreichen Mathe-Abitur
Bots vs. Corona
Solarleuchte merkur EDITORIAL
– Die Außergewöhnliche für höchste Ansprüche –
InnovatIon trIfft
nachhaltIgkeIt
DeSIgn UnD
leUchtkraft
aUf hÖchSteM Zwischen
nIveaU Roboterarmen und
Pflegeassistenten
Foto: privat
B.Sc. Maximilian Listl
Redaktion TiB und
Vertreter der SuJ München
L
aut der International Federation of Robotics stiegen von Industrieroboterarme, sondern beinhaltet auch autonom fahren-
2018 auf 2019 die weltweiten Verkaufszahlen von profes- de Autos und Assistenzroboter für die Pflege. Daher beschäftigt
sionellen Service-Robotern um 32 % auf 11,2 Milliarden sich die Sicherheit mit dem sicheren autonomen Fahren und die
US-Dollar. Der wesentliche Treiber dieses Wachstums ist die Akzeptanz mit den Wechselwirkungen zwischen Gesellschaft
branchenübergreifende Notwendigkeit die Wettbewerbsfähig- und Robotik in der Pflege.
keit durch Automatisierung zu steigern – nicht zuletzt beschleu-
nigt durch die aktuelle Covid19-Pandemie. Für die Visionäre unter den Lesern führen wir ein Interview mit
dem Kernentwicklerteam des humanoiden Roboters Roboy.
Doch was zeichnet moderne Roboter aus? Um dies zu beant- Dessen liebevoller und sympathischer Anblick erinnert in kein-
worten wird uns der bekannte Robotik-Experte, Prof. Knoll der ster Weise an einen zeitreisenden Terminator.
TU München einen ersten Überblick über die Robotik geben.
Um ein Grundverständnis der neuen Trends in der Robotik zu Viel Spaß bei der Lektüre!
bekommen, gliedern wir unsere Fachbeiträge in vier allgemein
greifbare Konzepte. Dabei behandelt jeder Artikel jeweils eines
der folgenden Konzepte: Wirtschaftlichkeit, Sicherheit, Flexibili-
tät und Akzeptanz.
Wirtschaftlichkeit beinhaltet Methoden für die Fertigung zu wett-
bewerbsfähigen Preisen. Flexibilität behandelt Technologien,
welche es erlauben die Fertigung zu beschleunigen, individua- Kontakt:
sipirit gmbh partner of lisieren und kundenspezifische Produkte in kleinen Stückzahlen
zu produzieren. Jedoch beschränkt sich die Robotik nicht nur auf
www.linkedin.com/in/maximilian-listl
maximilian.listl@tum.de
Elsässer Straße 40, D-76870 Kandel | www.sipirit.de
Telefon +49 (0) 72 75 / 98 58 - 98 | E-Mail best@sipirit.de Technik in Bayern 02/2021 3
Suchen Sie eine
INHALT
Konzepte der Robotik Dolmetscherin?
Humanoide Roboter und mehr Flexibilität in
HOCHSCHULE UND FORSCHUNG
der Robotik liegen im Fokus der Forschung
und auch im Fokus dieser Ausgabe. Das brei-
te Spektrum rangiert von modularen Robotern Bots vs. Corona 38
über die Perzeption von Transport robotern Ralf Kastner, Hochschule München
in der Logistik bis hin zur gesellschaft-
Mit der Uni Erlangen-Nürnberg zum erfolgreichen Mathe-Abitur 45
lichen Akzeptanz von Robotern. Dr.-Ing. Oliver Kreis, Dipl.-Phys. Patrick Schmitt, Alexander Nasarow, M.Sc.
Roboter werden biomechatronische Assistenten 46
Prof. Dr.-Ing. Jörg Franke et al., Friedrich-Alexander-Universität Erlangen-Nürnberg
AKTUELLES
VDI BV München: VDI Mitgliederversammlung 2021 29
VDI Young Engineers München: Ingenieure hinterfragen die Robotik 30
VDI BV München + TU München: Materialfluss-Kongress 2021 31
VDI BV München + acatech: Predictive Maintenance 31
Dem Leichtbauroboter VDI BV Bayern Nordost: Rückblick 2020 und Vorschau 2021 32
Foto: DLR
SARA wird ein Fügeprozess
VDI Landesverband Bayern: TA Luft 34
demonstriert (siehe S. 22)
VDI BV München: VDI Tag 2021 35
VDI BV München: Ingenieurskunst. Aus Liebe zur Technik 35
SCHWERPUNKT VDI BV München: Tätigkeitsbericht 2020 36
VDI Cross Cultural Group München: Vertrauen 42
Robotik im Überblick 06 VDI BV Bayern Nordost: Nachruf für Horst Kohl 44
Alois Christian Knoll
Roboy – der humanoide Roboter 10
Gespräch mit Rafael Hostettler, Alona Kharchenko,
Michael Sausmikat und Jürgen Lippl RUBRIKEN
Roboterbasierte Montage von Batteriespeichern 12 Veranstaltungskalender39
Lukas Tanz
Buchbesprechungen 48
Roboter für die additive Fertigung 14 Ausstellungstipp 49
Raven T. Reisch Impressum 49 Qualifikation
Sichere Positionierung für das autonome Fahren 16
Cartoon 50 Spezialisierung
Robert Bensch, Andreas Sperl, Luka Sachße und Nagaraj Desai Vorschau 50
by-suche.bdue.de
Modulare Robotersysteme für die Industrie 18
Roman Hölzl
Beilagenhinweis – Schultz GmbH & Co. KG
Moderne Roboterperzeption für die Logistik 20
Christopher Mayershofer
Wir bitten um freundliche Beachtung.
Flexibilität durch Robotik
Martin Görner, Oliver Eiberger, Thomas Hulin,
Korbinian Nottensteiner und Roman Weitschat
22
S. 10 VDI Landesverband Bayern
VDI Bezirksverein München, Ober- und Niederbayern e.V.
Westendstr. 199, D-80686 München
Tel.: (0 89) 57 91 22 00, Fax: (0 89) 57 91 21 61
Reinforcement Learning für die Industrierobotik 24 www.vdi-sued.de, E-Mail: bv-muenchen@vdi.de
Noah Klarmann
Foto: Julia Müller/ Devantro GmbH
VDI Bezirksverein Bayern Nordost e.V. Unsere Fachliste Technik
Responsible Robotics: Im Tanz der Akzeptanz 26 c/o Ohm-Hochschule, Keßlerplatz 12, D-90489 Nürnberg
Konstantin Ritt, Svenja Breuer und Maximilian Braun Tel.: (09 11) 55 40 30, Fax: (09 11) 5 19 39 86
E-Mail: vdi@th-nuernberg.de
gratis für Sie: Bundesver
Übersetze
band der Dol
r e. V. – Exp
m
erte
2019 | 202
0
Sind Roboter unheimlich? 28 VDE Bayern, Bezirksverein Südbayern e.V. - Qualifizierte Sprachprofis für
Der historische Hintergrund von Frank Dittmann Titelbild: Hohenlindener Straße 1, D-81677 München 200 technische Fachgebiete
Robot Mouse Tel.: (0 89) 91 07 21 10, Fax: (0 89) 91 07 23 09
Roboy 3.0 Foto: TU München www.vde-suedbayern.de, E-Mail: info@vde-suedbayern.de - Als PDF erhältlich unter FACHLISTE
TECH
Spezialisierte
Übersetzer/
fachliste-technik.bdue.de Dolmetscher/i
nnen für me
4 Technik in Bayern 02/2021 Technik in Bayern 02/2021 5 oder als Printversion über
service@bdue.de
SCHWERPUNKT
Von der Revolution der Automatisierungstechnik zur Neuerfindung
der Hirnforschung
Robotik im Überblick
V
or 60 Jahren wurde an einer Produk- mechanischer Aufbau, der nicht ohne verständlich. Üblicherweise erfolgt die
tionslinie von General Motors der Grund einem menschlichen Arm ähnelt. Regelung allein über eine Sollposition.
weltweit erste moderne Industrie Im Wesentlichen folgen auch heute noch Dies birgt in der Praxis hohes Gefahren
roboter Unimate in Betrieb genommen. alle modernen Industrieroboter diesem potenzial, weswegen Roboterarme in
Entwurfsprinzip. der Fertigung bis heute üblicherweise
Was heute als revolutionärer Schritt in der Mit der Anwendung des Konzepts der Pro- in abgeschlossenen Zellen arbeiten. Abb. 1: Biomimetischer Mausroboter des TUM
Automatisierungstechnik gilt, begründe- grammierung auf mechanische Systeme Eine neuere Entwicklung sind Roboter Informatik Lehrstuhls für Robotik, Künstliche
te gleichzeitig die moderne Robotik als macht die Robotik Fortschritte in der Re- mit Kraftsensoren, die für die sichere Intelligenz und Echtzeitsysteme
Industriezweig und eigenständige Wissen chentechnik. Sie ist für Aufgabenstellun- Mensch-Roboter-Kooperation konzipiert
schaft, die sich seitdem in eine Vielzahl gen zugänglich, die die Interaktion mit der sind. Die Regelung erfolgt hier nicht al-
von Spezialisierungsrichtungen aufgeglie- Umwelt erfordern. Es ist daher kein Zufall, lein über eine Sollposition, sondern über
dert hat, vom Staubsaugerroboter zu Hau- dass die Entwicklung der Robotik eng mit die ausgeübte Kraft, so dass eine gefahr-
se bis hin zum Wartungsroboter auf der der Begründung der KI im Jahr 1956 und lose direkte Interaktion zwischen Mensch tion), die Generierung von Handlungsstra- und die autonome Erstellung von wie beispielsweise Berichte über Unfälle
internationalen Raumstation ISS. Sie ist dem raschen Aufstieg von Informatik und und Roboter möglich wird. Nach mehr als tegien (Kognition) und die Umsetzung Umgebungskarten für die Lokalisierung mit (teil-)autonomen Fahrzeugen immer
damit zu einem der wichtigsten Techno- Rechnertechnik verbunden ist. Da das dreißig Jahren Forschung kommt diese dieser Strategien (Aktion) erforderlich. (Simultaneous Localization and Mapping, wieder zeigen.
logielieferanten für das autonome Fahren Hauptziel der KI gerade darin besteht, die Technologie mittlerweile immer häufiger Diese drei Prozesse laufen iterativ in einer SLAM). Für die Interaktion mit dem Men-
geworden, gilt als Schlüssel zur Sicherung kognitiven Leistungen von Menschen und in der Industrie zum Einsatz. geschlossenen Regelschleife und setzen schen wird nicht nur an Dialogsystemen Mit Neurorobotik ins Zeitalter von KI und
der Produktion am Standort Deutschland Tieren algorithmisch nachzubilden, ist die Gegenstand der aktuellen Forschung den Roboter in direkten Austausch mit geforscht, sondern auch an grundlegen- Cloud
im Rahmen von „Industrie 4.0“ und er- Robotik heute ihr potentiell prominentes im Bereich der Roboterentwicklung sind seiner Umgebung. den Prinzipien für eine natürliche und Die stetig steigende Rechenleistung hat
öffnet neue Perspektiven für Künstliche tes und weitestes, zugleich aber auch neben der Erschließung weiterer Anwen- Die Entwicklung kognitiver Architekturen effiziente Kommunikation. Trotz erheb- in den letzten Jahren unter dem Schlag-
Intelligenz (KI) und Hirnforschung. Grund- komplexestes Anwendungsfeld. dungsfelder wie etwa Medizin oder Land- für die Robotik ist eng verbunden mit der licher Fortschritte bleibt der Einsatz wort „Deep Learning“ zu deutlichen Fort-
legende Kenntnisse im Bereich der Robo- wirtschaft neue Konstruktionsprinzipien Entwicklung der KI. Wichtige Forschungs- von Robotern außerhalb kontrollierter schritten in der KI geführt. Nahezu alle
tik werden daher immer wichtiger – so- Grundlagen der modernen Robotik wie humanoide Roboter, Roboter aus bereiche sind Planungsalgorithmen, Umgebungen in Laboren oder in der modernen Systeme basieren heute auf
wohl in der Forschung als auch in der In- Die Robotik ist schon in ihren Anfängen weichen Materialien oder sogar moleku- maschinelles Sehen, Sensordatenfusion Industrie eine große Herausforderung, tiefen neuronalen Netzen, die auf großen
dustrie. Der vorliegende Artikel liefert eine ein interdisziplinäres Fachgebiet mit we- lare Roboter. Besonders vielversprechend Datenmengen trainiert werden. Auch in
kompakte Einführung in das Thema und sentlichen Beiträgen aus Maschinenbau, sind biomimetische Roboter, deren Me- der Robotik wurde diese Technik schon
diskutiert aktuelle wie künftige Entwick- Elektrotechnik und Informatik. Der wohl chanik das muskuloskelettale System von erfolgreich angewendet, etwa zum Grei-
lungen im Lichte neuer Technologien wie gängigste Robotertyp sind „Arme“ mit Wirbeltieren nachbildet (s. Abb. 1). Das fen von Objekten. Dennoch ist der prak-
Cloud-Computing und KI. sechs Freiheitsgraden, die aufgrund ihrer ermöglicht nicht nur sichere Zusammen- tische Nutzen bislang begrenzt, da sich
Vielseitigkeit vor allem in der Industrie arbeit mit Menschen und kostengünstige Aufgaben in der Robotik anders als etwa
Entstehungsgeschichte und begriffliche breiten Einsatz finden. Ebenfalls verbrei- Produktion, sondern vor allem eine effizi- in der Bilderkennung nicht einfach durch
Einordnung tet sind mobile Roboter, beispielsweise entere Umsetzung von Fertigkeiten wie statische Datensätze beschreiben las-
Schon vor der Robotik wurden Produk- für den Materialtransport, für den Einsatz etwa Laufen oder Greifen. Es wird weiter- sen. Während es im Internet Millionen von
tions
abläufe in Fertigungsbetrieben au- als Serviceroboter im öffentlichen Raum hin auch an Robotern für Einsätze in der Beispielbildern von Katzen oder Autos
tomatisiert. Bestes Beispiel hierfür ist die oder als Staubsaugerroboter im privaten Luft (z. B. Paketdrohnen), im Wasser gibt, sind die Sensordaten, die etwa an ei-
Textilindustrie, für die bereits im 18. Jahr- Haushalt. Diese Systeme sind ausge- (z. B. für Inspektionsaufgaben) oder gan- ner Fertigungslinie beim Fügen von Werk-
hundert der erste vollautomatische Web- reift und millionenfach erprobt. Die For- zen Roboterschwärmen geforscht. stücken anfallen, stark abhängig vom Typ
stuhl entwickelt wurde. Solche Maschinen schung hat sich daher im Laufe der Zeit des Roboters, Position und Art der Senso-
sind jedoch eigens für eine bestimmte zunehmend in Richtung Software und Perzeption – Kognition – Aktion ren sowie der konkreten Zielaufgabe. Für
Aufgabe konstruiert und ausschließlich neuer Konstruktionsprinzipien verlagert. Mit der Programmierung von Aktions das Training einer bestimmten Fertigkeit
auf diese beschränkt. Die entscheidende Besonders in der Anfangszeit der Robo- sequenzen lassen sich nur exakt definier- müssen also immer wieder neu individu-
Alle Abbildungen: TUM
Innovation des Unimate-Roboters war, tik spielte die Entwicklung von Algorith- te, repetitive Aufgaben umsetzen. Soll ein elle Daten generiert werden. Das ist nicht
dass er ähnlich wie ein Computer frei men für Regelung, Kinematik und Bahn- Roboter flexibel auf seine Umwelt reagie- nur zeit- sondern auch kostenintensiv.
programmierbar war und daher flexibel planung eine zentrale Rolle. Speziell bei ren und seine Handlungen situativ anpas- Ein vielversprechender Ansatz für die
für beliebige Aufgaben eingesetzt werden Industrierobotern sind hohe Genauigkeit sen, sind Algorithmen und Modelle für die Entwicklung neuer KI-Modelle an der
konnte. Daran orientiert sich auch dessen und zuverlässiger Betrieb heute selbst- Wahrnehmung der Umgebung (Perzep Abb. 2: Virtuelle Entwicklung von KI-Modellen mit digitalen Zwillingen Schnittstelle von Robotik, KI und Neuro-
6 Technik in Bayern 02/2021 Technik in Bayern 02/2021 7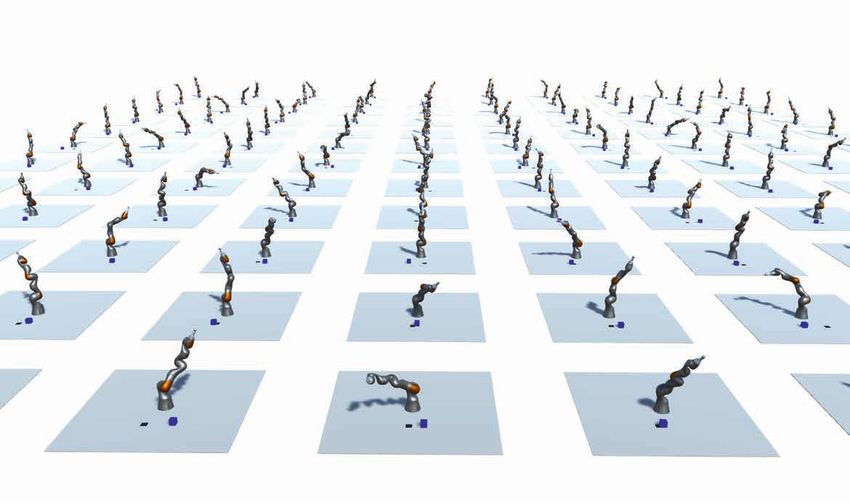
SCHWERPUNKT VERLAGSSONDERVERÖFFENTLICHUNG
wissenschaft ist die Neurorobotik, deren
Ziel es ist, das Studium von Gehirnmodel-
anderen Systemen für die Robotik erheb-
lich beschleunigen (s. Abb. 2). Sobald das
Weise profitiert die Hirnforschung, deren
wissenschaftliche Methodik durch die
Wo stoßen maschinelle Prozesse an ihre Grenzen?
len in einen Körper eingebettet und im ge- reale System als virtuelles Robotermodell Neurorobotik vollständig in virtuellen Ex-
schlossenen Regelkreis von Perzeption – verfügbar ist, können KI-Systeme direkt in perimenten abgebildet werden kann (s. Künstliche Intelligenz und Sprachverarbeitung spielen in der Robotik eine immer wichtigere
Kognition – Aktion zu ermöglichen. Dies der Simulation trainiert werden. Durch das Abb. 3). Die dabei neu gewonnen Erkennt- Rolle und bieten heute ungeahnte Möglichkeiten. Automatisierte Prozesse vereinfachen viele
erlaubt es einerseits Neurowissenschaft- Training in mehreren parallel ablaufenden nisse über das Gehirn haben großes Po-
lern, Simulationen des Gehirns unter rea- Simulationsinstanzen sind erhebliche tenzial, dann wieder in die Robotik zurück
Abläufe in Wirtschaft und Industrie. Gilt das auch für die maschinelle Übersetzung?
litätsnahen Bedingungen in Interaktion Geschwindigkeitssteigerungen möglich, transferiert werden zu können. Eine ganz
mit der Umgebung zu untersuchen und Grenzen werden allein durch die verfüg- ähnliche Entwicklung hat bereits in den
andererseits Robotikern, Erkenntnisse bare Rechenleistung gesetzt. Neben der 1950er Jahren begonnen, als Neurowis-
aus der Hirnforschung direkt auf Frage- Entwicklung kann auch der eigentliche senschaftler die Grundlagen für die heuti- Texte auf Knopfdruck automatisch in eine
stellungen der Robotik anzuwenden. Der Betrieb des Roboters direkt aus der Cloud gen tiefen neuronalen Netze entwickelten. andere Sprache zu übertragen – nicht erst
Aufbau solcher Experimente mit physi- heraus erfolgen. Für zeitkritische Aufga- Künftig ist dank erheblich gestiegener seit Isaac Asimov ein Traum der Mensch-
schen Robotern erfordert viel Fachwis- ben sind hierfür zwingend latenzarme Ver- Rechenleistung ein viel rascherer Aus- heit. Inzwischen ist die maschinelle Über-
sen, ist teuer und mit einer Vielzahl von bindungen erforderlich, wie sie beispiels- tausch zu erwarten. Schon jetzt gibt es setzung keine Science-Fiction mehr. Doch
Einschränkungen verbunden. Aus diesem weise die 5G-Technik ermöglicht. eine Vielzahl von Prototypen sogenannter was viele nicht wissen: Ohne menschli-
Grund wird im europäischen Flaggschiff- neuromorpher Prozessoren, die grund- ches Korrektiv können damit erhebliche
Projekt Human Brain Project (HBP), die Ausblick legende Wirkprinzipien des Gehirns nach- Risiken verbunden sein.
Neurorobotik Plattform (NRP) entwickelt, Die Virtualisierung eröffnet neue Perspek- bilden und dabei um Größenordnungen
Foto: Anthony Leopold – Fotolia
eine integrierte Entwicklungsumgebung tiven für die Robotik und ermöglicht erst- effizienter arbeiten können als klassische Sicherheit und Mehrwert dank
für Experimente in der Neurorobotik. Die mals den Zugang zu den neuesten Ent- Neumann-Prozessoren. Die Robotik wird menschlicher Intelligenz
Simulation läuft auf Höchstleistungs- wicklungen im Bereich der Rechentech- eines der Haupteinsatzgebiete für diese Maschinelle Übersetzungen sind heute
rechnern in der Cloud, die durchgeführten nik. Die KI-Simulation muss dabei nicht Technik sein und ihre Entwicklung daher durch riesige digitale Datenbestände und
Experimente sind komplett virtuell. Unter- auf einzelne Roboter oder Fertigungszel- maßgeblich mitbestimmen. neuronale Netzwerke deutlich besser als
stützt wird insbesondere auch die Simu- len beschränkt sein, sondern kann künftig noch vor Jahren. Doch der Teufel steckt
lation von tiefen neuronalen Netzen und ganze Fabriken umfassen. Die Program- Prof. Dr.-Ing. habil. Alois Christian Knoll wie so oft im Detail. Auch wenn sich ma- lichen Texten arbeitenden Übersetzer das
Industrierobotern zur Untersuchung von mierung und Steuerung aller Systeme er- Lehrstuhl für Robotik, Künstliche Intelli- schinell produzierte Texte auf den ersten gesprochene Wort übertragen, nutzen bei 5 TIPPS ZUR VERGABE
Fragestellungen aus der KI. folgt dann nicht mehr manuell, sondern genz und Echtzeitsysteme Blick bisweilen gut lesen, verbergen sich in ihrer Arbeit moderne Technologien. VON ÜBERSETZUNGEN
Mittels virtueller Robotik in der Cloud lässt kann mit Hilfe von KI direkt aus dem Pro- Fakultät für Informatik vielen Fällen gravierende Fehler darin.
sich die Entwicklung von KI-Modellen und duktentwurf abgeleitet werden. In gleicher Technische Universität München Bei komplexen Fachtexten können jedoch Qualifizierte Übersetzer und EXPERTENWISSEN
Achten Sie darauf, dass Ihr Übersetzer
selbst kleinste Ungenauigkeiten und Fehler Dolmetscher mit Fachwissen finden
auf das jeweilige Fachgebiet speziali-
drastische Folgen haben, daher sind die Der Bundesverband der Dolmetscher und
siert ist.
wenigsten maschinellen Übersetzungen in Übersetzer (BDÜ) erleichtert Ihnen die Su-
ANGEBOTSANFORDERUNG
der Realität unverändert nutzbar. Hier sind che nach kompetenten Sprachexperten,
Geben Sie Ihrem Übersetzer vorab
Profis gefragt, um schwerwiegende Konse- denn in den größten deutschen Berufsver-
Einblick in den Text, damit ein
quenzen wie Personen-, Sach- oder auch band der Branche wird nur aufgenommen,
verlässliches Angebot möglich wird.
Imageschäden zu vermeiden. Vor allem wer eine einschlägige fachliche Qualifika-
BEI MEHREREN ANGEBOTEN
bei frei im Netz verfügbaren Tools für die tion nachweisen kann, etwa ein Überset-
Noch wichtiger als der Preis ist das
automatische Übersetzung können auch zer- bzw. Dolmetscherstudium oder eine
Fachwissen des Übersetzers, damit
Datenschutzaspekte und Manipulations- staatliche Prüfung. Damit unterscheiden Sie Texte hoher Qualität erhalten.
möglichkeiten Gefahren darstellen. sie sich wesentlich von unqualifizierten An-
FRÜHZEITIGE BEAUFTRAGUNG
Als Werkzeug erfahrener Übersetzer fin- bietern auf dem Markt.
Eilaufträge sind in der Regel
den automatisierte Prozesse hingegen seit In der kostenlos nutzbaren Onlinedaten- deutlich teurer.
Jahren Verwendung, damit der weltweit bank des BDÜ finden Sie allein in Bayern
KOSTENEFFIZIENZ
steigende Bedarf an Sprachdienstleistun- rund 1.500 professionelle Dolmetscher Geben Sie möglichst nur Endfassun-
gen überhaupt bewältigt werden kann. und Übersetzer für mehr als 40 Sprachen gen von Texten in Auftrag, damit die
Diese Sprachexperten bieten heute im Zu- und zahlreiche Fachgebiete. Bundesweit Übersetzung günstig und effizient für
sammenspiel mit künstlicher Intelligenz sind es sogar mehr als 7.500 BDÜ-Mitglie- Sie erfolgen kann.
einen kompletten Service an, darunter oft der mit über 80 Sprachen, von denen viele
auch das sogenannte Post-Editing, also auf Technik spezialisiert sind. Mit ihrer Ex- Dolmetscher- und Übersetzerdaten-
bank für Bayern: by-suche.bdue.de
Abbildung: TUM
die kompetente Nachbearbeitung von ma- pertise sorgen diese Sprachprofis auch im
schinellen Übersetzungen. Sie sind zudem Zeitalter der Automatisierung für vertrau- Bundesverband der Dolmetscher und
fachkundige Berater für effiziente Über- enswürdige Übersetzungen hoher Qualität, Übersetzer e. V. (BDÜ)
Abb. 3: Virtualisierte Hirnforschung mit der Neurorobotik Plattform: Tierkörpermodell, Sensormodell und Hirnmodell interagieren in einer setzungsprozesse in Unternehmen. Auch die Ihnen langfristigen Mehrwert bieten. Landesverband Bayern: by.bdue.de
geschlossenen Schleife Dolmetscher, die anders als die mit schrift- Dipl.-Übers. Manuela Wilpert
8 Technik in Bayern 02/2021
SCHWERPUNKT
Roboy: Der humanoide Roboter
Bei Industrierobotern, die auf Einachs-Ge- warten uns dadurch auch eine viel größe-
lenken basieren, ist das schwierig. Wenn re Benutzerfreundlichkeit.
ich mit drei einzelnen Achsen eine Schul-
ter designe – und das ist der Standard –, TiB: Roboy hat nicht nur einen physischen
dann gibt es sehr früh Grenzen in der Dy- Körper, sondern besitzt auch Sensorik und
namik. Das beschneidet schon erheblich, Aktorik um mit Menschen verbal zu kom-
besonders wenn man menschenähnliche munizieren. Über welche kognitiven Fähig-
Tätigkeiten simulieren möchte, wie z.B. keiten verfügt Roboy?
Roboy ist eine open-source Ro- Technik in Bayern: Welche Idee steht hin- TiB: Entwickelt ihr bei Roboy auch ein ein Glas hochheben und es auf die Seite Alona Kharchenko: Es gibt in Bezug auf
boterplattform – mitentwickelt ter dem Roboy-Projekt? Gehirn? stellen. Für ein Kugelgelenk ist das kein Roboys kognitiven Fähigkeiten und die
Rafael Hostettler: Die Vision hinter Roboy Rafael Hostettler: Nein, ein Gehirn ent- Problem. Auch die Wirbelsäule können zugrundeliegende Software zwei unter-
von Forschern und Studenten ist, einen Roboter zu schaffen, der genau- wickeln wir nicht. Wir wollen mit dem wir in der S-Form bewegen, dadurch ha- schiedliche Teilbereiche: Wenn wir über
der TU München, mit dem Ziel so gut funktioniert wie der menschliche Roboter auch interagieren und nutzen na- ben wir viel mehr Freiheitsgrade und die die Telepräsenz sprechen, dann denkt
einen menschenähnlichen Körper und wir wollen mit diesem Roboter türlich KI an vielen Stellen, machen aber Bewegungen sind viel weicher. Wir sind Roboy hier nicht selbst, sondern er gibt
in 30 Jahren unbeschränkt weiterleben. bewusst keine Forschung im Bereich auch viel flexibler, als mit einem starren lediglich die Informationen weiter an den
Roboter zu bauen.
Mit dieser langfristigen Vision können wir Hirnsimulation, sondern konzentrieren System und können schneller auswei- Operator, den menschlichen Bediener.
Rafael Hostettler, Alona Khar- nicht zu einem Investor gehen und sagen, uns auf den Körper. chen. Die Anzahl der Unfälle und Brüche Der zweite Teil ist Roboys Persönlichkeit,
Foto: Julia Müller/ Devantro GmbH
chenko, Michael Sausmikat dass wir 20 Mrd. Euro in den nächsten geht stark zurück. Das ist natürlich ein sein Denken und seine Wahrnehmungen.
und Jürgen Lippl sind die 30 Jahren brauchen. Das ist nicht sehr TiB: Wie verknüpft ihr die unterschiedlichen Vorteil. Der Nachteil ist, dass man mit Hier arbeiten wir mit Sprachsystemen,
realistisch, weshalb wir Schritt für Schritt Aktivitäten der Forscher, Studenten und fünf Kugeln in der Wirbelsäule ein extrem mit Modellen, die das menschliche Han-
Leiter der unterschiedlichen Lösungen entwickeln, um das große Ziel Unternehmen an dem Roboy Projekt? komplexes System hat. Hier muss man deln verstehen und auch das zukünftige
Aufgabenbereiche (Projekt- zu erreichen. Seit 2013 haben wir drei Rafael Hostettler: Ein wichtiger Punkt jeden Freiheitsgrad einzeln definieren. Die Handeln vorausberechnen. Eine sehr
leitung, Software, Elektronik, Generationen von humanoiden Robotern ist, dass die bisherigen Entwicklungen Komplexität steigt exponentiell. wichtige Eigenschaft für die Interaktion
entwickelt und seit 2018 sind wir eine ei- an Roboy alle Open Source sind und da- mit Menschen ist auch, dass Roboy Ge-
Mechanik).
gene unabhängige GmbH. mit Kooperationen sehr einfach möglich TiB: Nachdem Roboy neben den visuellen fühle zeigen kann. Middelware, eigene motor boards mit
sind. Inhaltlich hat sich aus dem Studen- und taktilen Sensoren auch weitere Sen- eigenem Bussystem und eigenem Core-
tenteam inzwischen ein Core-Team her- soren, wie zum Beispiel Radar in sich inte- TiB: Funktioniert das Zeigen von Gefühlen board und ein Simulationsmodell. Wir ha-
ausgebildet, in dem es darum geht, die grieren kann, welche neuen Möglichkeiten durch die Kamerabilder oder reagiert ben inzwischen deutlich mehr Kontrolle
Der humanoide Roboter Roboy 3.0 Kerntechnologie weiter zu entwickeln. eröffnet dass für Roboy? Roboy nur auf Sprache? über die Bewegungen des Roboters, sie
bei der Vorstellung im Oktober 2020
Hier arbeiten wir an der Telepräsenz und Michael Sausmikat: Alle Sensoren helfen Alona Kharchenko: Zurzeit basiert die werden auch flüssiger. Ganz neu ist auch
an Force-feedback. Die Studententeams dem Roboter, mehr Informationen über Reaktion allein auf dem Verstehen des das Telepräsenz-System. Man kann jetzt
werden mehr für explorative Aufgaben seine Umgebung zu erhalten. Und je mehr Textes, natürlich kann man auch die diesen Roboter wirklich mit einer VR-Brille
eingesetzt und können sich ausprobieren, Informationen man hat – auch in Bezug auf Kamerabilder integrieren. Wir machen und zwei Kontrollern fernsteuern. Ich neh-
z.B. im letzten Jahr an einer künstlichen den Roboter – desto besser kann man Ent- das aber (noch) nicht. me jetzt den Ort durch den Roboter auch
Nase. scheidungen z.B. über Bewegungsmus- so wahr, als ob das ich selbst wäre.
Die Unternehmen unterstützen uns, weil ter treffen. Wenn der Roboter in Zukunft TiB: Welche Funktionen könnte die Kame-
sie auf Messen mit Roboy der coolste gehen soll, dann sind die Informationen ra in Zukunft noch umfassen? TiB: Nachdem ihr nun Roboy 3.0 vorge-
Aussteller sind. Er ist sehr zuverlässig des Radars über die Beschaffenheit des Alona Kharchenko: Momentan gibt es die stellt habt, was sind eure nächsten Ziele?
und hat bis jetzt schon weit mehr als 100 Untergrundes sehr wichtig. Das gilt auch Teile der Kamera durch die wir Menschen Rafael Hostettler: Natürlich sehen wir ge-
Messetage absolviert. Dann ist es für Fir- für das Greifen von Gegenständen. detektieren, durch die wir die aktuelle rade, was wir noch alles besser machen
men spannend, im Simulationsbereich Alona Kharchenko: Die Sensoren, die wir Handlung eines Menschen in der kurzen können. Wir denken über neue Muskeln
dabei zu sein und ganz wichtig für die Fir- integrieren gehen über die menschlichen Interaktion mit dem Roboter registrie- nach, um eine bessere und schnellere
men sind natürlich unsere Talente in den Sinneswahrnehmungen hinaus, also wir ren. Natürlich muss dieses Wissen dann Kontrolle zu bekommen. Ein großes The-
Studententeams. können mehr, als Menschen gemeinhin in den Kontext eingebunden werden und ma ist auch die Haut, also die Roboter
können. Mit dem Radar sehen wir z.B. wir können in Zukunft das Kamerawissen oberfläche. Und dann werden wir neue
TiB: Welche Vorteile erwartet ihr euch durch Wände hindurch und wir haben ei- und die Sprachinhalte zusammenführen. Hände brauchen. Insgesamt funktioniert
von einem menschenähnlichen Design im nen Ultraschall- und einen Infrarotsensor. Roboy aber sehr gut, ein schönes Video
Gegensatz zu einem kommerziellen, star- Mit den Sensoren bekommen wir Zusatz- TiB: Ende Oktober 2020 habt ihr die dritte ist unter: https://youtu.be/YlRoO7FDd2o
ren Roboter? informationen über Umwelt, Beschaffen- Iteration, also Roboy 3.0, der Öffentlichkeit zu sehen. Außerdem haben wir auch
Foto: Julia Müller/ Devantro GmbH
Jürgen Lippl: Auf der Hardware-Seite heit, Temperatur etc. vorgestellt. Kamen Neuerungen hinzu? einen eigenen Roboy-Kanal: https://www.
gewinnt man einfach flüssigere Bewe- Rafael Hostettler: Eigentlich gibt es fast youtube.com/c/Roboy.
gungen und viel mehr Möglichkeiten. TiB: Hat Roboy also in manchen Bereichen nur Neuerungen, denn es wurden bei
Als Mensch ist einem gar nicht bewusst, übermenschliche Fähigkeiten? Roboy 3 alle mechatronischen Teile neu Das Interview führten
wie viele Freiheitsgrade man für flüssige, Rafael Hostettler: Ja, und das macht es entwickelt. Also neuer Kopf, neuer Nacken, Maximilian Listl, Fritz Münzel
leichte Bewegungen benötigt. natürlich auch so interessant und wir er- neue Gelenke. Dann eine komplett neue und Silvia Stettmayer
10 Technik in Bayern 02/2021 Technik in Bayern 02/2021 11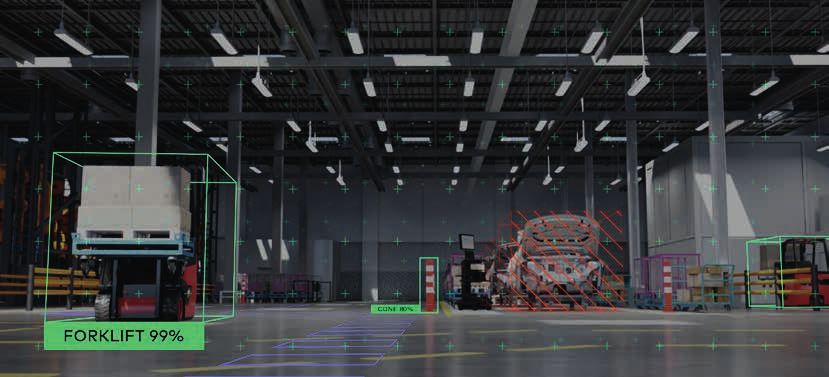
SCHWERPUNKT SCHWERPUNKT
Konzept Wirtschaftlichkeit
Roboterbasierte Montage von
Batteriespeichersystemen
B
atteriespeichersystem auf Basis Montage und automatisierungsgerech- benötigen, soll diese in das Produktde-
von Lithium-Ionen-Zellen werden tes Produktdesign sign integriert werden, um so einen
in vielfältigen Anwendungsfäl- Innerhalb eines Zellblocks werden ein möglichst vorrichtungsfreien und repro-
len eingesetzt. Die ganzheitliche Be- zelne Lithium-Ionen-Zellen (LIZ) durch duzierbaren Fügeprozess zu realisieren.
trachtung der Produktgestaltung und eine Kombination von Reihen- und Parallel-
des Herstellungsprozesses birgt dabei schaltung miteinander verbunden. An- Roboterbasierte Montage
das Potenzial für vielfältige Optimie- schließend werden die Blöcke je nach Zur Evaluierung des erarbeiteten Bau-
rungsansätze, insbesondere durch den Anwendungsfall zu Batteriemodulen kastenkonzepts wird am iwb eine
Einsatz von Industrierobotern in der zusammengesetzt, um individuelle Leis- roboterbasierte Montagezelle aufgebaut
Montage. tungsanforderungen zu erfüllen. Als (siehe Abbildung). Die Einzelteile wer-
elementarer Baustein müssen die Zell- den durch einen Leichtbauroboter der
iMoBatt – Innovatives funktions blöcke somit nicht nur den Schutz und Firma KUKA (LBR iiwa) zu Zellblöcken
integriertes Moduldesign für modulare die Kühlung der einzelnen LIZ gewähr- assembliert. Leichtbauroboter stellen
Quelle: iwb – TUM
Batteriepacks leisten, sondern auch die effiziente In- eine neue Klasse von Robotern dar, die
Angesichts des steigenden Energie- tegration in ein übergeordnetes Modul speziell für die Kollaboration mit dem
bedarfs und der damit einhergehen- ermöglichen. Menschen entwickelt wurden. Damit
den Verknappung fossiler Rohstoffe Die Automatisierung von Montagepro- der LBR iiwa mögliche Kollisionen mit Abb.: Bestehende Versuchszelle am iwb
ist die Nutzung regenerativer Energien zessen setzt voraus, dass bereits bei der den Menschen erkennt, ist er mit Dreh-
zwingend notwendig. Dabei erfordert Entwicklung die Richtlinien zum mon- momentsensoren in jeder seiner sieben Weise ein stabiler Montageprozess mit Obwohl sich das eingesetzte Roboter- dern gegebenenfalls ergänzen.
eine effiziente Nutzung solcher Ener- tage- und automatisierungsgerechten Achsen ausgestattet. In Kombination hohem Automatisierungsgrad realisiert system durch die integrierte Sensorik Der Dank des iwb gilt dem Bundesminis-
giequellen eine zeitliche Entkopplung Design berücksichtigt werden. Gemäß mit einem dynamischen Modell des werden. besonders für die Mensch-Roboter- terium für Wirtschaft und Energie, dem
von Energieerzeugung und -verbrauch, [1] wird die Automatisierung der Monta- Roboters können unerwartete Kräfte in- Mit dem Ziel, den Herstellungsprozess Kollaboration eignet, ist sie aus Pro- Projektträger Jülich sowie allen betei-
weshalb elektrische Energiespeicher ge wesentlich durch die nicht vorhande- folge einer Kollision erkannt und der Ro- weiter zu optimieren und nicht wert- zesssicht nicht notwendig und würde ligten Projektpartnern für die Förderung
zum Ausgleich der Schwankungen in ne montagegerechte Produktgestaltung boter stillgesetzt werden. Im Gegensatz schöpfende Sekundärprozesse zu ver- lediglich zu einer Reduzierung der Effi- und Unterstützung in dem Forschungs-
der Versorgung immer relevanter wer- und die schlechte Handhabung von Ein- zur Kollisionserkennung auf Grundlage meiden, wird ein spezielles Greifsystem zienz führen. Arbeiten Mensch und Ro- projekt iMoBatt (Förderkennzeichen:
den. Neben der Weiterentwicklung der zelteilen gehemmt. Für das iMoBatt-De- der Stromaufnahme der Servomotoren für den Roboter entwickelt. Neben dem boter gleichzeitig im selben Arbeitsraum, 03ET6153C).
einzelnen Zellen ist die wirtschaftliche sign wird insbesondere die Reduzierung ist diese Art der Gelenksüberwachung Handling der einzelnen LIZ und der Zell- müssen aufwendige Sicherheitsvorkeh-
Herstellung von Batteriemodulen eine von Einzelteilen und die Vermeidung deutlich präziser und ermöglicht eine halterhälften soll die Qualitätssicherung rungen getroffen werden, die den Betrieb Lukas Tanz M.Sc.
zentrale Forschungsfrage. Im Rahmen formlabiler Bauteile durch Funktionsinte- aktive Impedanzregelung. Letztere in den Greifer integriert werden und der Anlage oftmals unwirtschaftlich ma- Institut für Werkzeugmaschinen und
des Forschungsprojekts iMoBatt wird gration angestrebt. Darüber hinaus wird wird auch als Nachgiebigkeitsregelung parallel zum Montageprozess erfolgen. chen. Insbesondere der Nachweis, dass Betriebswissenschaften (IWB)
am Institut für Werkzeugmaschinen und auf eine einheitliche Montagerichtung bezeichnet und verknüpft Positions- Die Zellen werden durch einen pneuma- biomechanische Grenzwerte, die für den Technische Universität München
Betriebswissenschaften (iwb) der Tech- und die Entkopplung der Fügestellen ge- und Kraftinformationen. Ähnlich dem tischen Hubzylinder sequenziell aufge- Menschen in der technischen Spezi-
nischen Universität München (TUM) achtet. Durch die Nutzung unmittelbarer menschlichen Arm ist der Roboter somit nommen und im Greifer gespeichert. fikation 15066 festgelegt sind, bei einer
Literatur
daher die effiziente Fertigung und Mon- Verbindungen und den weitgehenden in der Lage, variabel auf Kontaktkräfte Während weitere Zellen aufgenommen möglichen Kollision nicht überschrit-
tage von Batteriespeichersystemen Verzicht auf Verbindungselemente wie zu reagieren und von der ursprünglich werden bzw. bereits die ersten Zellen ten werden, führt oftmals zu geringen [1] Lotter, B. u. Wiendahl, H.-P.: Montage in der
industriellen Produktion. Berlin, Heidelberg:
untersucht. Schrauben wird zudem der Einsatz von geplanten Bewegungstrajektorie ab- in den Zellhalter eingesetzt werden, er- Robotergeschwindigkeiten und folglich
Springer Berlin Heidelberg 2012
Dazu wird der gesamte Produktlebens- Robotern zur Prozessautomatisierung zuweichen. Für die Montage ist diese folgt die elektrische Prüfung der übrigen zu längeren Taktzeiten. [2] Matheson, E., Minto, R., Zampieri, E. G. G.,
zyklus von der Konstruktion und Ent- begünstigt. Fähigkeit besonders wertvoll, da sie es LIZ innerhalb des Greifsystems. Das Die Mensch-Roboter-Kollaboration ist Faccio, M. u. Rosati, G.: Human–Robot Col-
laboration in Manufacturing Applications:
wicklung über die Produktion sowie den Für die Kontaktierung der einzelnen LIZ dem Roboter ermöglicht, sich von der Handling der Zellhalterhälften und des als mögliches Werkzeug zu begreifen, A Review. Robotics 8 (2019) 4, S. 100
Betrieb bis hin zur Wiederverwendung wird im Rahmen des iMoBatt-Projekts Umgebung führen zu lassen und Posi- montierten Zellblocks erfolgt über einen welches im Wettbewerb zu anderen [3] Abu-Dakka, F. J., Rozo, L. u. Caldwell, D. G.:
betrachtet. Ziel ist die Entwicklung ei- die Eignung des Laserstrahlschweißens tionsungenauigkeiten auszugleichen integrierten Parallelgreifer, sodass der Lösungsalternativen steht. Ein auto- Force-based variable impedance learning
for robotic manipulation. Robotics and Auto
nes neuartigen Baukastensystems für geprüft. Entgegen herkömmlicher An- [2, 3]. In Kombination mit dem beschrie- gesamte Montageprozess ohne Werk- matisierungsgerechtes Produktdesign nomous Systems 109 (2018), S. 156–167
modulare Batteriepacks. sätze, die eine externe Spanntechnik benen Produktdesign kann auf diese zeugwechsel erfolgen kann. kann sie in keinem Fall ersetzen, son-
12 Technik in Bayern 02/2021 Technik in Bayern 02/2021 13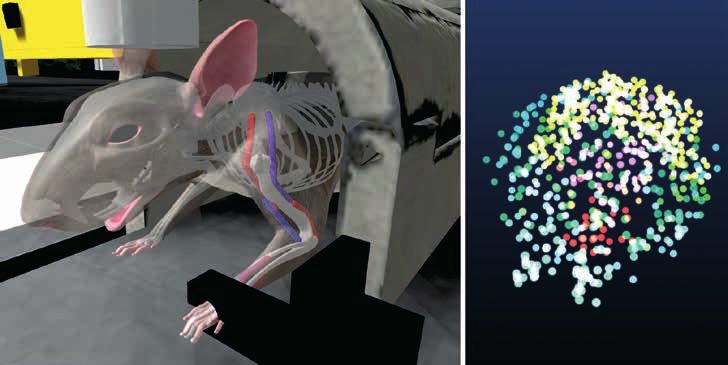
SCHWERPUNKT
Konzept: Wirtschaftlichkeit – Roboterbasierter 3D-Druck
Roboter für die additive Fertigung
R
oboterbasierte Wire Arc Additive die anschließend nachbearbeitet werden um eine Robotermaschinensimulation
Manufacturing Verfahren ermögli- müssen (Rodrigues, 2019). sowie um WAAM-Prozesssensoren als
chen die kostengünstige Herstel- Innerhalb des EU-Projekts SAMOA (Sus- Perzeptionselemente des Roboters und
lung großvolumiger metallischer Bauteile. tainable Aluminium additive Manufactu- entsprechende Auswertealgorithmen er-
Mithilfe eines Monitoringsystems kann ring for high performance Applications), weitert werden.
adaptiv auf Prozessinstabilitäten reagiert das vom EIT Raw Materials im Rahmen
werden. von Horizon 2020 gefördert ist, wird der Roboterbasierte additive Fertigung
kostengünstige Aufbau von Aluminium- Für den WAAM-Prozess wird, wie in Abbil-
Wire Arc Additive Manufacturing struktur mittels additiver Fertigungs- dung 1 dargestellt, ein 6-Achs-Industriero-
Beim Wire Arc Additive Manufacturing technologien betrachtet. Dabei steht boter von Comau sowie ein Drehkipptisch
(WAAM) wird mittels eines lichtbogen- die Reduktion der Herstellungskosten verwendet. Insgesamt stehen somit acht
basierten Schweißprozesses Material bei gleichzeitiger Erhöhung der Bauteil- Achsen zur Verfügung, um das Bauteil
Foto: Siemens
wie beispielsweise Stahl, Aluminium oder qualität im Vordergrund. Projektpartner bzw. das Werkzeug/den MIG-Brenner im
Titan in mehreren Lagen auf ein Sub- sind neben den universitären Einrichtun- Prozess optimal auszurichten. Durch die
strat oder ein Basisbauteil aufgetragen, gen Luleå University of Technology und 8-Achs-Kinematik können die Vorteile der Abb. 1: Aufbau des Wire Arc Additive Manufacturing Fertigungssystems mit 6-Achs-Industrieroboter und Drehkipptisch
sodass dreidimensionale Bauteile/Bau- Politecnico Milano das Fraunhofer IWS additiven Fertigung hinsichtlich der Bau-
teilstrukturen entstehen. Besonders die und die Industrieunternehmen IMR Metal teilkomplexität optimal genutzt und Stütz-
hohen Auftragsraten sowie die geringen Powder Technologies, Siemens, Centro strukturen vermieden werden. Neben der schiedener Sensordaten beispielsweise oder sich die Position des Arbeitspunkts der Flexibilität des Roboters und den simu-
Materialkosten sind bei diesem Verfah- Ricerche Fiat sowie Gemmate (Volpp, Flexibilität durch die hohe Anzahl an Frei- von Strom-, Spannungs- oder Akustiksen- unkontrolliert verschiebt. Um diesem lationsgestützten Kompensationsalgo-
ren von Vorteil. Die Genauigkeit bleibt 2019). heitsgraden ermöglicht die Nutzung von soren mit Aufzeichnungsfrequenzen von Problem zu begegnen, wird mithilfe der rithmen nicht erforderlich.
hingegen aufgrund des Lichtbogens Bei Siemens steht im Rahmen von SA- Robotern den Aufbau von großvolumigen bis zu 4000Hz wird überwacht, ob der Schweißkamera der Abstand des Robo- Im nächsten Schritt werden die Forscher
und des daraus resultierenden breiten MOA besonders der bereits genannte Bauteilen. Lediglich der Arbeitsraum des Lichtbogen und damit der Aufbauprozess terwerkzeugs zum Bauteil kontinuierlich die durchgängige digitale Softwarekette
Materialauftrags hinter der Genauigkeit WAAM-Prozess im Fokus der Forschung Roboters stellt eine Begrenzung für die stabil sind. Dazu werden die Daten mittels über Computer-Vision-Algorithmen aus- zur Realisierung dieses hybriden Ferti-
von konventionellen pulverbettbasierten und Entwicklung. Dazu werden im Projekt Größe des Bauteils dar. Machine-Learning-Algorithmen prozess gewertet. Basierend auf den gewonnen gungsansatzes weiterentwickeln, um so
Verfahren zurück, sodass vornehmlich Bestandteile des robotischen WAAM- Der Roboter wird über die CNC-Steuerung parallel auf einem Edge-Gerät ausgewer- Prozesserkenntnissen und dem Digitalen die Fertigungskosten weiter zu reduzie-
endkonturnahe Bauteile gefertigt werden, Systems entwickelt, die darüber hinaus Sinumerik 840D sl mit dem Run MyRobot tet und auf Anomalien geprüft. Indem ein Zwilling können dann operative Entschei- ren und die Bauteilqualität zu erhöhen.
/Direct Control Modul gesteuert, sodass Digitaler Zwilling des Bauteils aufgebaut dungen und eine Prozessregelung umge-
zur Roboterprogrammierung G-Code ver- wird, kann dann die Qualität des Bauteils setzt werden. Raven T. Reisch M.Sc.
wendet werden kann, der im industriellen bereits während des Prozesses automa- Siemens AG
Kontext beim CNC-Fräsen Standard ist. tisiert bewertet werden (s. Abb. 2). Wirtschaftlichkeit
Dieser Maschinencode enthält WAAM- Darüber hinaus wird eine Schweißkamera Durch den vorgestellten Ansatz können Acknowledgements:
spezifische Programmmodule und wird als weiteres Perzeptionselement des Ro- kostengünstig großvolumige und indivi- The work concerning this paper was part-
zuvor aus einem CAD/CAM-Programm boters verwendet. Da die Geometrie des dualisierte Bauteile angefertigt werden. ly funded by EU EIT RawMaterials, Project
ausgeleitet, in dem die Prozessplanung Bauteils nicht statisch ist, muss sicher- Der Roboter bietet dafür eine flexible SAMOA No. 18079.
sowie eine Robotermaschinensimulation gestellt werden, dass auch während des Plattform, über die dank eines Werkzeug-
durchgeführt werden. Dadurch können Aufbaus keine Kollision mit dem zuvor wechselsystems auch weitere Schritte
bereits vor dem Prozess die Roboter- aufgebrachten Material stattfindet. Dies der Fertigungskette wie z. B. eine spa- Literatur
bahnplanung überprüft und etwaige Kol- kann besonders dann passieren, wenn nende Nachbearbeitung realisiert werden Volpp J. (2019). Samoa project. Website:
lisionen des Roboters mit den ihn umge- die Auftragsrate und der Energieeintrag können. Über eine vorgelagerte Fräs- samoaproject.eu (access: 26. October 2020)
Rodriguez T., Duarte V., Miranda R., Santos T.,
benden Komponenten ausgeschlossen nicht zur Robotergeschwindigkeit passt kraftsimulation kann beispielsweise
Oliveira J. (2019). Current Status and Perspec-
werden. und deshalb die in der Robotermaschi- am Roboter eine Fräskraftkompensa- tives on Wire and Arc Additive Manufacturing
nensimulation verwendete Schichthöhe tion umgesetzt werden. Dadurch können (WAAM). Materials 2019
Reisch R., Hauser T., Kamps T., Knoll A. (2020).
Prozessüberwachung als Schritt in Rich- nicht zur realen Schweißraupengeome- die mittels WAAM gefertigten Bauteile Robot Based Wire Arc Additive Manufacturing
tung First-Time-Right Printing trie passt. Dadurch wird zu viel oder zu an der gleichen Fertigungsstation auf System with Context-Sensitive Multivariate
Zur Überwachung des WAAM Prozesses wenig Material aufgetragen, sodass der Schruppqualität nachbearbeitet werden. Monitoring Framework. Flexible Automation
and Intelligent Manufacturing International
Abb. 2: Digitale Prozesskette von der Entwicklung über die Fertigung bis hin zum Produkt für die kommt ein multivariates Monitoring-sys- Schweißbrenner ohne einen Eingriff in Eine in der Anschaffung kostenintensive, Conference (FAIM) 2020
roboterbasierte, hybride Fertigung mittels Wire Arc Additive Manufacturing nach Reisch 2020 tem zum Einsatz (Reisch, 2020). Mittels ver- den Prozess mit dem Bauteil kollidiert zusätzliche CNC-Fräse ist somit aufgrund
14 Technik in Bayern 02/2021 Technik in Bayern 02/2021 15
SCHWERPUNKT SCHWERPUNKT
In KI-Navi werden drei Ziele verfolgt:
Konzept Sicherheit Bestimmung der Bewegung und Posi-
Sichere Positionierung für
tion des autonomen Systems mittels
LiDAR- und Kamera-Sensoren
Bestimmung von 3D-Umgebungskarten
das autonome Fahren
inklusive semantischer Informationen
(z.B. Objekte)
Überwachung aller Sensordaten und
der Positionslösung
Verfahren der Künstlichen Intelligenz (insb.
Deep-Learning) haben im Bereich der Ka-
D
Abb. 3: (a) Architektur eines tiefen neuronalen Netzes, dass aus einer Bildsequenz (links) die
a jeder Sensor unter bestimmten mera- und LiDAR-Datenverarbeitung große Bewegung der Kamera schätzen kann (Pose, rechts in Rot). Faltungsnetzwerk (CNN) in Gelb und
Umgebungsbedingungen seine Fortschritte gegenüber klassischen Verfah- rekurrentes neuronales Netz (RNN) in Blau. (basierend auf DeepVO [1]); (b) Geschätzte
Schwächen hat (bspw. GNSS bei ren erzielt. Der große Vorteil besteht darin, Bewegungstrajektorie (in Rot), Ground Truth (in Grün), basierend auf KITTI Datensatz [3]
Tunnel oder Kamera bei Nebel), entwickelt dass die verwendeten neuronalen Netze le-
die ANavS GmbH ein auf Künstlicher Intel- diglich mit einer Menge an Eingangsdaten Bewegung (Pose) ableitet. RNNs können Netz [2] jeder Punkt einer 3D-Punktwolke
ligenz basierendes System, dass Sensor- (z.B. Bildern) und den gewünschten Aus- Sequenzen verarbeiten (bspw. Sprache, (eines LiDAR-Scans) einer Objektklasse
daten geschickt kombiniert, um das auto- gangsdaten (z.B. Bewegungsschätzung) Text) und können durch ihr internes „Ge- zugewiesen, bspw. Straße oder Auto (Abb.
nome Fahren sicherer zu gestalten. trainiert werden können, ohne dass spezi- dächtnis“ das Zeitverhalten der Eingangs- 4). Diese wichtige Szeneninformation wird
elle Algorithmen manuell für die Problem- daten lernen. Abb. 3b zeigt die geschätzte darüber hinaus zur Stabilisierung der Be-
Warum KI & Navigation? stellung entworfen werden müssen. Durch Trajektorie einer Autofahrt (in Rot). wegungsschätzung und der Optimierung
Damit autonome Systeme wie mobile dieses sog. „end-to-end“ Training werden Kamera-, sowie LiDAR-Daten dienen so- der Kartenerstellung genutzt [2].
Roboter oder Autos zuverlässig und zenti- die internen Netzparameter automatisch wohl der Positionierung, als auch der 3D- Die beiden visuellen Sensoren, Kamera und
metergenau ihre Position bestimmen kön- gelernt, so dass ein optimales Ergebnis Kartenerstellung. Diese Daten können LiDAR, tragen durch deren, mithilfe von KI
nen, werden zuverlässige und redundante erzielt wird. darüber hinaus zur Erstellung von digitalen abgeleiteten Information, wie Position und
Positionierungssysteme benötigt. Abb. 2: Architektur der Sensorfusion. KI-Komponenten in Blau Abb. 3a zeigt die Architektur eines tiefen HD-Karten dienen. Diese enthalten Anno- Karte, zur Funktionsüberwachung der kom-
Mithilfe von GNSS (Global Navigation neuronalen Netzes, das aus einer Sequenz tationen statischer Objekte, die georeferen- pletten Multi-Sensor Positionierung bei.
Satellite System) kann eine hochgenaue In diesem Kontext arbeitet die ANavS (Mono- und Stereo-Kamera), ein 3D-Li- von Bildern (links) die Bewegung der Ka- ziert hinterlegt sind. Diese digitalen Karten Ein wichtiger Faktor dabei ist, dass LiDAR
globale Position bestimmt werden. Stra- GmbH, der Lehrstuhl für Kommunika- DAR, eine IMU (Beschleunigungssensor, mera schätzt (rechts „Pose“) [1]. Es be- können ebenfalls zur Stützung der Positi- und Kamera eine vom GNSS-Empfang un-
ßenschluchten, Bäume und Tunnel stellen tion und Navigation der TU München Gyroskop) und eine CAN-Schnittstelle für steht dabei aus einem Faltungsnetz (CNN, onslösung dienen. abhängige Positionslösung liefern können
hier aber eine große Herausforderung dar. und die 3D Mapping Solutions GmbH am Fahrzeug-Odometriedaten (Raddrehzahl gelb), das relative Bewegungen aus zwei Neben der Bewegungsschätzung (Abb. und somit nicht durch Jamming/Spoofing
Eine intelligente Sensorfusion mit weite- Forschungsprojekt „KI-Navi“, gefördert und Lenkradwinkel). aufeinanderfolgenden Bildern schätzt, und 3) werden KI-Verfahren auch zur seman- gestört werden können. Die Funktions-
ren Sensoren, wie bspw. Inertialsensorik, durch das Bundesministerium für Bildung Eine globale Positionierung wird über die einem rekurrenten Netz (RNN), das die tischen Segmentierung eingesetzt. Dabei überwachung selbst wird ebenso durch KI-
Odometrie, Kamera und LiDAR kann die- und Forschung (BMBF). Ziel von KI-Navi GNSS-Empfänger gewährleistet. IMU- Bewegungsdynamik lernt und die relative wird durch ein vortrainiertes neuronales basierte Verfahren gestützt.
se Herausforderungen meistern. Zudem ist es, ein zuverlässiges KI-gestütztes und Odometrie-Daten dienen dabei zur
können KI-basierte Ansätze zur Absiche- System zur zentimetergenauen Lokali- Stützung. Dr.-Ing. Robert Bensch, Andreas Sperl,
rung von Positionierungssystemen beitra- sierung für das autonome Fahren zu ent- Der LiDAR-Sensor erfasst eine 3D-Punkt- Luka Sachße und Nagaraj Desai
gen, z. B. gegen das sog. Jamming oder wickeln. Das System besteht aus einer wolke der Umgebung, durch Abstands- ANavS GmbH, München
Spoofing. Beim Jamming werden Satelli- Hardwareplattform (ISP, Abb. 1), die die messungen eines rotierenden Lasers.
tensignale gestört, so dass sie nicht mehr nötige Sensorik enthält, und einem Soft- Diese Punktewolken, sowie die Kamera-
nutzbar sind. Beim Spoofing werden die- wareframework (Abb. 2). Die Sicherheit bilder, erlauben die Erstellung einer 3D
se Signale sogar gezielt verfälscht, um und Redundanz sollen durch die Inte- Karte der Umgebung, sowie die relative
Referenzen
dem Empfänger eine falsche Position gration von KI-Modellen erhöht werden. Positionierung innerhalb dieser Karte.
vorzutäuschen. Diese haben unterschiedliche Aufgaben, Dieses Verfahren wird auch als „Simul- [1] S. Wang, R. Clark, H. Wen, and N. Trigoni, “
von Bewegungsschätzung und Positi- taneous Localization and Mapping“ DeepVO: Towards end to-end visual odometry
with deep recurrent convolutional neural
onsbestimmung mittels Kamera- und (SLAM) bezeichnet. networks,” IEEE International Conference on
LiDAR-Daten über Objekterkennung bis Robotics and Automation (ICRA), 2017
[2] X. Chen, A. Milioto, E. Palazzolo, P. Giguère, J.
zur Funktionsüberwachung der Sensoren KI-basierte Positionierung und deren
Behley and C. Stachniss, “SuMa++: Efficient
und Positionslösung. Absicherung LiDAR-based Semantic SLAM”, IEEE/RSJ In-
Die klassische Sensorfusion von GNSS ternational Conference on Intelligent Robots
and System (IROS), 2019
Sensorik des autonomen Systems und IMU Sensoren mithilfe eines erwei- [3] A. Geiger, P. Lenz and R. Urtasun. “Are we ready
Die Integrated-Sensor-Platform (ISP) ver- terten Kalman-Filters ist bereits gängige for Autonomous Driving? The KITTI Vision
eint fünf Sensortypen und die nötige Re- Praxis. Die Kopplung aller fünf Sensoren Benchmark Suite”, IEEE International Con-
Abb. 4: LiDAR-basierte 3D Karte und Bewegungstrajektorie (Blaue Linie). Die erkannten Objekt- ference on Computer Vision and Pattern Recog-
Abb. 1: Die Integrated-Sensor-Platform (ISP), chenleistung. Zu den Sensortypen zählen wird jedoch erst durch die Integration von klassen der Kartenpunkte sind farbkodiert, z.B.: Straßen (Lila), Autos (Blau), Vegetation (Grün). nition (CVPR), 2012
entwickelt von der ANavS GmbH drei GNSS-Empfänger, zwei Farbkameras KI-Modellen möglich. Erstellt mit SuMa++ [2], basierend auf KITTI Datensatz [3]
16 Technik in Bayern 02/2021 Technik in Bayern 02/2021 17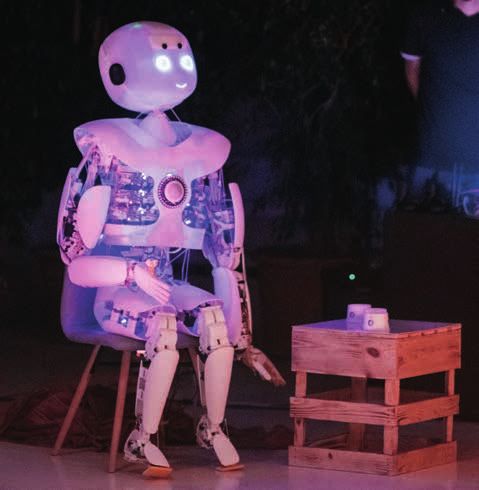
SCHWERPUNKT SCHWERPUNKT
Aufbau des Roboters aus Einzelmodulen, die
im Plug-and-Play-Verfahren verknüpft werden
die relevanten Modul-Kennwerte enthal- Systeme ein beachtliches Investment dar, Damit sind sie schnell in Betrieb zu neh-
ten. Aus diesen Kennwerten wird sofort wobei sie nicht an sich ändernde Anforde- men, einfach in der Handhabung und kön-
und automatisch ein virtuelles Modell rungen angepasst werden können. Wei- nen an verschiedene Aufgaben angepasst
des neu aufgebauten Roboters generiert, terhin sind eingesetzte, nicht rekonfigu- und bedarfsweise umgebaut werden.
“selbst-programmiert” also. Basierend rierbare Standard-Roboter unzureichend
auf diesem digitalen Zwilling der neu auf ihre Aufgabe zugeschnitten. Dies Die Vision einer flexiblen, autonomen
aufgebauten Roboterkinematik wird die führt zu deutlichen Produktivitätsverlus- Fertigung mit modularen Robotern
Regelung und Steuerung des Roboters ten, bspw. bei der Taktzeit. Der Zusammenbau ist derart simpel ge-
eingerichtet. Der aus Modulen vom Nut- halten, dass die modularen Kea Roboter
zer innerhalb weniger Minuten aufgebau- Modularität als Antwort auf die direkt vom Endnutzer zusammenge-
te Roboter ist damit sofort einsatzbereit Ansprüche an Flexibilität in der Industrie baut werden können. Einzelne Module
und kann wie ein herkömmlicher Leicht- Die Antwort auf die Ansprüche an roboti- werden dabei durch einen Schnellver-
bauroboter genutzt werden. sche Lösungen in der mittelständischen bindungs-Mechanismus verbunden. In-
Industrie sind modulare, sofort vom nerhalb weniger Minuten ist damit ein
Anforderungen an moderne Roboter für Anwender nutzbare Systeme, die sich Roboter mit bis zu zwölf Achsen, der
den industriellen Einsatz bedarfsgerecht an Aufgaben anpassen Traglasten bis zu 20 kg handhaben kann
Ein Großteil der Wertschöpfung in lassen. Das junge Münchner High Tech auf die Anforderungen des Kunden zu-
Deutschland, Europa und weltweit findet Unternehmen Kea Robotics GmbH ver- geschnitten. Der Mehrwert für Kunden
Konzept Flexibilität in kleinen und mittelständischen Unter- folgt diese Strategie. Mit den Unterneh- liegt in der Möglichkeit, seine Produk-
Modulare Robotersysteme
nehmen statt. Kleinere und mittlere Un- menswurzeln an der TUM tritt die Firma tion mit einem Baukasten an Modulen
ternehmen konnten die Vorteile roboti- an, um modulare Roboter zu kommerzia- flexibel an die Auftragslage anzupassen,
scher Automatisierung bisher noch nicht lisieren. Kea Robotics vertreibt Roboter- ohne neue aufgabenspezifische Roboter
für die Industrie
voll ausnutzen. Die Gründe dafür sind module. Diese können beim Kunden zu zu kaufen.
vielfältig: Es fehlen Experten zur Roboter- modularen Robotern zusammengefügt
Programmierung und Überprüfung der werden und programmieren ihre Rege- Roman Hölzl
Funktionalität. Zudem stellen bestehende lung und Kollisionsdetektion selbst. Kea Robotics GmbH
F
lexibilität in der Fertigung ist der Stückzahlen noch immer manuell erledigt aufwändig von Experten eingerichtet,
Kerntreiber einer effizienten, loka- und der rasch wachsende Markt für kun- kalibriert und getestet werden bevor sie
len Produktion, die im internatio- denindividuelle Produkte nicht ausrei- nutzbar waren.
nalen Wettbewerb mithalten kann. Ein chend bedient.
modularer Baukasten für Industrierobo- Die Rolle intelligenter Algorithmen in der
ter bietet eine technisch anspruchsvolle, Flexibilität in der Robotik durch modularen Robotik
kundenzentrierte Lösung für den Mittel- Modularität “Effortless creation of safe robots from
stand, um bedarfsgerecht auf Fertigungs- Die ersten Jahrzehnte des Einsatzes von modules through self-programming and
herausforderungen zu reagieren. Robotern in der Industrie seit der 1950er self-verification” war der Titel der bahn-
Roboter sind eine deutsche Erfolgsge- Jahre waren getrieben durch die Nach- brechenden Veröffentlichung aus dem
schichte. Sie haben zu enormen Produkti- frage aus der Automobilindustrie. Eine Jahr 2019, die das Cover der renommier-
vitätssteigerungen in der Fertigungsindu- Industrie, deren Prosperität durch hohe ten Robotik Zeitschrift “Science Robo-
strie geführt und den Fertigungsstandort Stückzahlen getrieben ist. Im Gegensatz tics” zierte. Forscher der TUM führten
Foto: Kea Robotics
Deutschland nachhaltig gesichert. Trotz dazu stehen flexible modulare Systeme, intelligente Algorithmen ein, die als “self-
enormer technologischer Fortschritte ist die auch bei geringen Stückzahlen effi- programming” bezeichnet werden. Nach
der Aufbau, die Inbetriebnahme und die zient einsetzbar sind. Deren praktische Zusammenbau der verschiedenen Ro-
Programmierung von Robotern teuer und Nutzbarkeit war bisher allerdings einge- botermodule, bspw. Motormodule, Ver-
zeitaufwendig. Aus diesen Gründen wer- schränkt. Die ersten modularen Syste- bindungsmodule oder Greifer, werden Konzept von Kea Robotics: Aus Modulen können verschiedene Roboterarme konfiguriert werden, die nach dem Zusammenbau auf Grund smarter
den kurzfristige Aufträge selbst bei hohen me mussten nach ihrem Zusammenbau deren individuelle Daten ausgelesen, die Algorithmen sofort nutzbar sind
18 Technik in Bayern 02/2021 Technik in Bayern 02/2021 19Sie können auch lesen