Zum Einfluss der geometrischen Ausrichtung von 360 - Reflektoren bei Messungen mit automatischer Zielerfassung
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

ebenfalls auf das vom Prisma reflektierte
Zum Einfluss der geometri- Signal bezieht. Bisher bietet nur die Fir-
ma Leica einen eigens für Robottachy-
schen Ausrichtung von 360°- metrie entwickelten 360°-Grad Reflektor
in quasi monolithischer Bauweise an (Typ
Reflektoren bei Messungen mit GRZ4, vgl. Abb. 1). Er besteht aus sechs
automatischer Zielerfassung verschachtelten Prismen, die mit ver-
schiedener Ausrichtung möglichst nah
360°-Reflektoren können aus allen Richtungen angemessen werden. In Kombination um die Stehachse gruppiert sind, wäh-
mit Tachymetern mit ATR dienen sie nicht nur zur Distanz- sondern auch zur Rich- rend andere Hersteller dabei geblieben
tungs- und Höhenfestlegung. Aufgrund ihrer optisch-geometrischen Eigenschaften sind, mehrere kleine Einzelprismen
ergeben sich spezifische Ablagen, die sich jeweils als Funktion der Reflektororientie- kranzförmig um die Stehachse anzuord-
rung modellieren lassen. Mittels einer am geomETH (Geodätische Messtechnik, nen. Im Rahmen der hier vorgestellten
ETHZ) entwickelten automatisierten Einrichtung wurden diese Kalibrierfunktionen Untersuchung wurde die mit dem Typ
von fünf Exemplaren des Reflektortyps GRZ4 reproduzierbar ermittelt; eine Abhän- GRZ4 erreichbare Genauigkeit evaluiert.
gigkeit von der Distanz und von der Visursteilheit wurde ebenfalls untersucht. Ein inzwischen modifizierter Prototyp des
GRZ4 (Abb. 1b) wurde einbezogen.
Les réflecteurs à 360° peuvent être visés à partir de toutes les directions. En combi- Wie bereits von der elektrooptischen Di-
naison avec des tachéomètres munis d'un ATR, ils servent à mesurer des distances, stanzmessung bekannt, gilt eine Additi-
des directions et des angles verticaux. Pour les applications nécessitant une préci- onskorrektion nicht nur für einen be-
sion élevée, il s'agit cependant d'apporter des corrections à ces trois grandeurs. Ces stimmten Reflektortyp, sondern für eine
corrections sont liées aux propriétés optiques et géométriques des réflecteurs et se Instrumenten-Reflektorkombination. Das
laissent modéliser en fonction de leur orientation. Une procédé automatisé, dévelop- grundsätzliche Verhalten ist zwar typ-
pé à geomETH (Geodätische Messtechnik, ETHZ), a permis de déterminer les fonc- abhängig [Schmidt, 1995]; die Beschrei-
tions de calibration de cinq réflecteurs de type GRZ4. L'influence de la distance et de bung des Exemplarverhaltens erfordert
l'inclinaison de visée a également été analysée. jedoch spezielle Untersuchungen. Ob-
wohl sich der variable Anteil der Additi-
Riflettori a 360° possono essere mirati da tutte le direzioni. In combinazionei con onskorrektion überwiegend auf die Ei-
tachimetri con ATR servono per misurare non solo distanze, ma anche direzioni e genschaften der Sendediode und der da-
angoli verticali. Per applicazioni che richiedono una precisione elevata, bisogna però durch bedingten Phaseninhomogenitäten
effettuare delle correzioni a questi tre valori. Queste correzioni si basano sulle zurückführen lässt, hat sich ein lediglich
caratteristiche ottiche e geometriche dei riflettori e si fanno modellare secondo fehlerbeschreibendes Modell, das auf
l’orientamento dei riflettori. Un procedimento automatizzato - sviluppato nell’ambito physikalische Parameter verzichtet, als
della geomETH (Geodätische Messtechnik, ETHZ) - permette di determinare le geeignet erwiesen. Den Ausbreitungs-
funzioni di calibrazione dei 5 riflettori tipo GRZ4. Inoltre, l’influsso della distanza e und Reflexionseigenschaften des Signals
dell’inclinazione della visuale è stato analizzato. in bzw. an den verschiedenen Medien
(Luft, Glas, Metall) wurde bisher lediglich
Navigation. Weil die Leistungsfähigkeit bei Präzisionsinstrumenten, die Polarisa-
C. Favre, M. Hennes heutiger Tachymetersysteme (vor allem tionsmodulation verwenden, Rechnung
durch die automatische Zielerfassung) getragen: Man verwendet zusammen mit
gegenüber der terrestrischer Navigati- dem Mekometer ME5000 Prismen, die
onsinstrumente erheblich gestiegen ist, hinsichtlich der weitgehenden Erhaltung
1. Einleitung
ist die Verwendung derartiger 360°- der Polarisationszustände optimiert sind,
360°-Reflektoren kommen vorwiegend Reflektoren auch bei einer Reihe weiterer und achtet auf eine gleichartige Stellung
dort zum Einsatz, wo unabhängig von Messaufgaben (Aufnahme, Absteckung, in Bezug auf die Verdrehung um die Zie-
ihrer geometrischen Ausrichtung Distanz- Baumaschinensteuerung, ggf. auch De- lachse (Y- und Anti-Y-Stellung). Allen
und auch Richtungsmessungen ermög- formationsmessung [Flach, Naterop, Anwendungen gemeinsam ist jedoch,
licht werden sollen. Vor dem Aufkommen 1999]) vorteilhaft. Für diese Anwendun- dass die Verschwenkung quer zur Ziel-
der Tachymeter mit automatischer Zie- gen müssen Genauigkeiten bis in den richtung möglichst gering gehalten wird,
lerfassung (Robottachymeter) waren dies Millimeterbereich sichergestellt werden. um systematische Fehler unterhalb einer
hauptsächlich Anwendungen mit gerin- Dies gilt nunmehr nicht nur für die Di- Toleranzgrenze zu halten. Diese Bedin-
gen Genauigkeitsanforderungen (im De- stanzmessung, sondern auch für die gung beschränkt jedoch den effizienten
zimeterbereich) wie zum Beispiel in der Richtungsmessung, weil sich letztere Einsatz von Robottachymetern.
möglich ist, wenn nicht auf die Ausrich-
tung des Reflektors geachtet werden
muss. Deformationsmessungen, bei de-
nen von mehreren Stationen derselbe
Reflektor angemessen werden sollte,
können ebenfalls Genauigkeitseinbussen
durch mangelnde Reflektorausrichtung
erleiden. Da auch die Richtungsmessung
zum Reflektor stattfindet, muss auch die
resultierende Querabweichung bei der
Bestimmung der notwendigen Ausrichte-
genauigkeit berücksichtigt werden. Wie
im folgenden Abschnitt gezeigt, ist diese
ausserdem von der Position p des Pris-
mas bezüglich der Stehachse abhängig
Abb. 1: 360°-Prismen: GRZ4 standard und modifiziert (Leica), RMT-Reflektor (vgl. Abb. 2 und Gleichungen (1) und (2)).
(Spectra Precision) Um die aufwendige Nachführung des
Reflektors zu umgehen, werden vorteil-
Möglicherweise ergeben sich aber auch 2. Anforderungen der haft 360°-Reflektoren eingesetzt, die von
für 360°-Reflektoren zusätzliche spezielle ATR an die geometrische allen Seiten aus mit der ATR anzielbar
Anwendungsvorschriften, wenn eine Ge-
Ausrichtung sind. Diese machen erst eine sinnvolle
nauigkeitsgrenze unterschritten werden
Baumaschinensteuerung möglich, da
soll. Durch die unterschiedlichen Kon- 2.1 Aspekte aufgrund der sonst Signalunterbrechungen zu nicht
struktionsmerkmale bedingt, gilt auch für automatischen Zielerfassung vertretbaren Positionsausfällen führen.
die Instrumente mit automatischer Zie- Wirtschaftliche Aspekte, die zur Entwick- Hier ist jedoch zu prüfen, inwieweit die
lerfassung (ATR= Automated Target Re- lung und zum Einsatz von Tachymetern Orientierung des Reflektors tatsächlich
cognition), dass sich instrumenten- und mit automatischer Zielerfassung geführt keinen Einfluss auf die Richtungs- und
exemplarabhängige Korrekturen ergeben haben bzw. führen, bedingen ebenfalls Distanzmessung hat: Seine optischen
können. Weil die Anwendung derartiger die Verwendung eines angemessenen Eigenschaften sollten die hohe Genauig-
Instrumente auch die Benutzung Reflektortyps. Da auch die Richtungs-
typfremder Reflektoren wirtschaftlich er- keit des Tachymeters nicht reduzieren.
messung auf das reflektierte Signal ba-
scheinen lassen mag, ist auch das Ver- siert, sollte dieses ausreichend gebündelt 2.2 Funktionales Modell
halten bei der Kombination verschiedener
und intensitätsbalanziert wieder am In- Bei Feldarbeiten üblicherweise verwen-
Fabrikate zu untersuchen. Dieser Aufsatz
strument eintreffen. Dies bedeutet, dass dete Prismen bestehen aus Glas. Die
soll - neben der Vorstellung eines auto-
die Reflexionseigenschaften über den Ausbreitungsgeschwindigkeit einer in den
matisierten Testverfahrens – einen ersten
gesamten von der ATR genutzten Strahl- Glaskörper mit dem Brechungsindex n
Überblick über mögliche funktionale Zu-
kegel homogen sein sollten. Werden – eintretenden elektromagnetischen Welle
sammenhänge geben. Diese sind für Di-
bei grossen Distanzen – Prismenbäume wird verlangsamt, weswegen scheinbar
stanz, Richtung und Höhe getrennt zu
benutzt, müssen die Einzelprismen sym- die gemessene Distanz verlängert wird.
betrachten. Im Hinblick auf den Einsatz
metrisch zur Horizontal- (Quer-) als auch Dieses Offset wird in der Additionskon-
mit automatischer Zielerfassung werden
zur Vertikalachse angeordnet sein, da stante berücksichtigt. Falls die Welle
die Reproduzierbarkeit, die Exemplar-
sonst aufgrund inhomogener Intensitäts- nicht exakt senkrecht auf die Pris-
streuung, die Abhängigkeit von der Di-
verteilung Richtungsfehler erwartet wer- menoberfläche trifft, verlängert sich der
stanz und von der Steilheit der Visur, je-
den müssen. Strahlweg im Prisma zusätzlich, der re-
weils sowohl für die Distanz-, als auch für
die Richtungs- und die Höhenkompo- Das Potential eines Robottachymeters sultierende Distanzfehler ∆d lässt sich für
nente untersucht. Die Reproduzierbarkeit lässt sich erst im kinematischen Modus übliche Prismen anhand der folgenden
wurde an vier Prismen des Typs GRZ4 voll ausschöpfen. Hier wird allerdings die Formel berechnen (z.B. [Rüeger, 1990]).
und einem modifizierten GRZ4 unter- Genauigkeit eingeschränkt, wenn der
sucht. Zeigen sich Abweichungen, die Reflektor nicht ausreichend zur Station
von der Ausrichtung des Reflektors ab- ausgerichtet ist (vgl.Kap. 2.2). Anwen- (1)
hängen, als systematisch und signifikant, dungsbeispiele sind Absteckungsarbeiten
werden sie mit Reflektorkorrektion be- und die topographische Geländeaufnah- Neben der Reflexion an den Rückwän-
zeichnet. me, bei denen effizienteres Arbeiten den erfolgt auch eine Strahlbrechung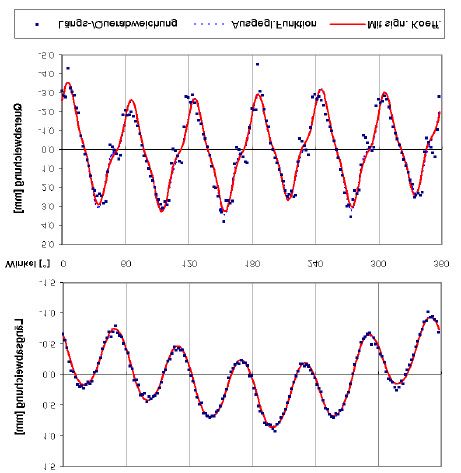
Bei kranzförmigen 360°-Reflektoren wer- verwendet werden kann und somit auch
den mehrere Einzelprismen vom Signal auf verschiedene Fabrikate übertragen
getroffen, verschiedene Fehleranteile werden kann. Die in dieser Untersuchung
überlagern sich, wobei jeweils die Orien- gemachten Aussagen beziehen sich alle
tierung des Einzelprismas zu berücksich- auf Beobachtungen mit automatischer
tigen ist. Hinzu kommt noch, dass mit zu- Zielerfassung.
nehmender Fehlausrichtung auch die Allen 360°-Reflektoren ist gemeinsam,
scheinbare Apertur des Prismenkörpers dass sie Rotationssymmetrie aufweisen.
abnimmt, weswegen inhomogene – und Deswegen ist zu vermuten, dass sich
nicht unbedingt symmetrische – Refle- Abweichungen periodisch in Abhängig-
xionen erfolgen. Die Übertragung der keit der Reflektororientierung wiederho-
Abb. 2: Querabweichung bei ver- oben angegebenen geometrisch- len. Die Periode wird dabei in erster Linie
schwenktem Prisma (Prinzipskizze) optischen Zusammenhänge auf ein 360°- durch die Anzahl der Einzelprismen be-
Prisma des Typs GRZ4 gestaltet sich stimmt. Beim GRZ4 sind zweimal drei
beim Ein- und Austritt in den Glaskörper, noch schwieriger, weil der Strahl von Einzelprismen ineinander verschachtelt
die den Strahl bei nicht exakt senkrech- Prismenkörpern reflektiert wird, die au- (vgl. Abb. 1b), weswegen als Frequenzen
tem Eintreffen, d.h. verschwenktem sserdem eine unterschiedliche vertikale ganzzahlige Vielfache von drei zu er-
Prisma, ablenkt. In Abb. 2 wird ein Strahl Orientierung zur Ausbreitungsrichtung
warten sind. Zusätzlich könnte eine Peri-
aufweisen. Auch hier ist die wirksame
betrachtet, der bei exakt ausgerichtetem odenlänge von 360° auftreten, die aus
Apertur eines jedes Teilkörpers ebenfalls
Prisma die Stehachse S schneiden wür- der exzentrischen Lagerung bezüglich
von der Orientierung abhängig und äu-
de. Infolge der Verschwenkung um α der Stehachse herrührt. Dies trifft sowohl
sserst variabel. Eine theoretische Herlei-
wird er gebrochen und verfehlt das Pris- für die Abweichung der Distanz- (yd) als
tung der in Abhängigkeit von der Pris-
menzentrum Z um die Ablage ∆q. Diese auch für die der Richtungs- (yr) und – mit
menorientierung zu erwartenden Abwei-
lässt sich berechnen, zum Beispiel nach Ausnahme Grundschwingung - der Hö-
chungen anhand der physikalisch-
[Rüeger, 1990]. geometrischen Parameter würde um ein henkomponente (yh) zu. Für jede ist eine
mehrfaches komplizierter als für ein separate Fourierreihe gemäss (1) anzu-
Standardprisma, weswegen an dieser setzen, wobei die Amplituden Ak die Grö-
Stelle ein plausibles fehlerbeschreiben- sse des Fehlers und ϕk die zugehörige
des Modell angegeben wird, das auf die Phasenlage der einzelnen Schwingungs-
Einbeziehung bauformbeschreibender komponente beschreiben. ϕk bezieht sich
Durch geeignete Wahl der Parameter-
Parameter weitgehend verzichtet. Es hat auf eine am Reflektorkörper festgelegte
kombination h und p lässt sich das Pris-
den Vorteil, dass es auch ohne spe- Ausrichtung; beim GRZ4 wurde der auf-
ma hinsichtlich der Robustheit gegen zielle Kenntnis der Reflektorgeometrie geprägte Pfeil gewählt. Von dort aus wer-
Verschwenkung optimieren, Beispiele
zeigt die Abbildung 3 für herkömmliche
Prismen: das sich seit einigen Jahren auf
dem Markt befindliche GPR1 (Leica)
weist deutlich geringere Querfehler auf
als das GDR11 (Wild).
Dieser Zusammenhang gilt allerdings
nur, wenn auch die Gesetze der geome-
trischen Optik anwendbar sind. Da in
Verbindung mit der automatischen Zie-
lerfassung die Intensitätsverteilung über
den gesamten Strahlquerschnitt massge-
bend ist und die Konstruktionsmerkmale
der ATR zu berücksichtigen sind, sollen
die hier dargestellten Zusammenhänge
lediglich die Schwierigkeiten bei der Op-
timierung eines Prismas verdeutlichen
und einen Eindruck der zu erwartenden
Grössenordnung geben. Abb. 3: Theoretischer Längs- und Querfehler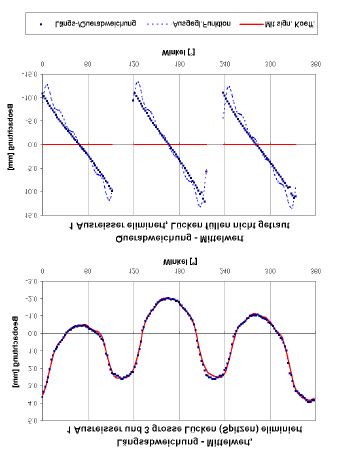
den die Reflektorverschwenkungen nach mit optischen Mitteln mit einer Genauig-
rechts (beim Betrachten von oben) positiv keit von 0.1 mm bestimmt und die nach-
gezählt. Unter Beachtung dieser Konven- folgenden Messungen entsprechend kor-
tion kann die ermittelte Funktion auch als rigiert.
Korrektion benutzt werden. Die Steuerung des Messablaufes und der
k' Datenerfassung geschieht über die seri-
y i + ei = ∑ Ak sin(ω k t i + ϕ k ) (3) elle Schnittstelle von einem PC aus. Es
k =0 wurden zwei Software-Konzepte einge-
setzt: Das erste basiert auf Excel und ruft
ωk: Kreisfrequenz
Visual-Basic-Makros auf [Favre, Flach,
ti: Orientierung des Prismas [gon]
1999]. Diese kommunizieren mittels Be-
ei: Residuum an der Stelle ti [m bzw.
fehlen der Geocom-Bibliothek mit den
gon]
beiden verwendeten Leica-Tachymetern
Die unbekannten Parameter Ak und ϕk und stellen die ermittelten Daten direkt in
werden in einer Ausgleichung bestimmt, einem Excel-Arbeitsblatt zur Verfügung.
wobei aus rechentechnischen Gründen Das zweite Software-Konzept benutzt die
sinnvollerweise eine Linearisierung nach graphische Programmiersprache Lab-
dem Additionstheorem vorgenommen view, die als vielseitiges Werkzeug zur
wird. Bei der automatischen Bestimmung Steuerung von Messabläufen konzipiert
der Reflektorkorrektion ist es problemlos ist. Es ist hinsichtlich der Erweiterung auf
möglich, die Beobachtungen an gleich- weitere Hardware-Komponenten als we-
mässig über den Vollkreis verteilten sentlich flexibler anzusehen. Für die
Stützstellen vorzunehmen. In diesem Fall Steuerung und Datenerfassung wird für
lassen sich alle unbekannten Koeffizien- Abb. 4: Montierung des Reflektors das Leica-Instrument auf die GSI-
tenpaare unabhängig voneinander be- Kommandos zurückgegriffen, die als
stimmen, d.h., dass sich das Ergebnis grundlegender Kommunikationsbefehls-
ausreichende Anzahl von Reflektororien-
nicht beim Hinzufügen oder Weglassen satz auch der Geocom-Bibliothek zu-
tierungen vorgenommen werden. Erste
einzelner Schwingungsanteile ändert. Untersuchungen gaben den Hinweis, grunde liegen. Da TOPCON und Spectra-
Ohne Genauigkeitsverlust können also dass beim GRZ4 signifikante Schwin- Precision einer ähnlichen Kommunikati-
allein die sinnvoll erscheinenden Koeffi- gungen bis zur Kreisfrequenz 18 auftre- onsphilosophie folgen, kann das Unter-
zienten (für das GRZ4: ω1 und ωk als ten können, weswegen nach dem suchungsverfahren leicht auf Instrumente
ganzzahlige Vielfache von 3) geschätzt Nyquist-Theorem mehr als 36 Beobach- dieser Hersteller erweitert werden.
werden, andererseits bleibt das Ergebnis tungen für die eindeutige Bestimmung Die Untersuchungen wurden nach einem
gleich, unabhängig davon, ob nicht- vorliegen müssen. Dies legt eine Auto- einheitlichen Standard durchgeführt.
signifikante Unbekannte im Ansatz ent- matisierung der Untersuchung nahe. Prinzipiell wurden bei einer Distanz von
halten sind oder nicht. Die Prüfung der Hierzu wurde ein motorisiertes Tachy- 15 m und horizontaler Visur zwei aufein-
Schwingungskomponenten auf Signifi- meter als Drehgeber „zweckentfremdet“: anderfolgende Messreihen jeweils in Hin-
kanz erfolgt nach einem einfachen t-Test, Der Traggriff wurde entfernt, womit auf und Rückgang durchgeführt, wobei der
wobei allein die Signifikanz der Amplitude einfache Weise die zentrische Befesti- Reflektor jeweils um 2° verdreht wurde.
Ak (und nicht der Phase) über das Vorlie- gung des zu untersuchenden Reflektors Innerhalb von etwa zwei Stunden ent-
gen der Schwingung mit der Kreisfre- gewährleistet werden konnte (vgl. stand so ein Datensatz von jeweils 720
quenz ωk entscheidet (vgl. [Hennes, Abb. 4). Das Instrument ist sorgfältig zu Beobachtungen. Da die Positionierung
1991]). horizontieren, um Taumelfehler auszu- auf wenige mgon genau erfolgte, konnten
schliessen. Die aufgrund von Ferti- aus jeweils vier zu einer Orientierung ge-
gungstoleranzen auftretende Exzentrizi- hörenden Messungen Rückschlüsse über
3. Automatisierte tät, die sich der ω1-Schwingung überla- die Reproduzierbarkeit und die Stabilität
Untersuchung gert, liesse sich rechnerisch nur durch die des Versuchsaufbaus gewonnen werden.
Ausrichtungsabhängiger Wiederholung der Versuchsreihen mit Da auf stabile Versuchsbedingungen (so
Fehlerkomponenten jeweils unterschiedlicher Ausgangsorien- weit wie möglich im Labor in ungestörter
tierung von der reflektorbedingten Feh- Atmosphäre, Beobachtung auf Pfeilern)
Zur Bestimmung der unbekannten Koeffi- lerkomponente trennen. Um den Mess- geachtet wurde und den Instrumenten
zienten der Reflektorkorrektionsfunktion aufwand gering zu halten, wurden die eine Einlaufzeit gewährt wurde, zeigten
müssen Beobachtungen über eine Exzentrizität und ihre Orientierung vorab sich keinerlei Driften.
Als Beobachtungsinstrument diente ein TCA1100, der nach Untersuchungen am geomETH (Professur für Geodätische Messtechnik, ETH Zürich) die gleiche in- nere Genauigkeit aufweist wie Vergleich- sinstrumente des Typs TCA1800. 4. Ergebnisse 4.1 Reproduzierbarkeit und Exemplarstreuung Die Reproduzierbarkeit kann zunächst aus denjenigen Wiederholungsmessun- gen abgeleitet werden, für die die Posi- tionierung des Primas als identisch ange- sehen werden kann. Für die Distanzmes- sung ergibt sich für alle fünf untersuchten Reflektoren mit 0.06 mm für die Repro- duzierbarkeit der doppelte Quantisie- rungsfehler (kleinste ausgegebene Ein- heit 0.1 mm). Die Richtungs- und Hö- henmessung erfolgt mit einer Wiederhol- genauigkeit zwischen 0.3 mgon und 0.6 mgon (entsprechend 0.07 mm und 0.14 mm) für verschiedene Exemplare des Abb. 5: Ergebnisse der Fourieranalyse für ein GRZ4 GRZ4, wobei die Höhengenauigkeit ge- ten GRZ4 lassen sich Winkelangaben mit reihe sehr signifikant reproduzierten. Die- ringfügig, aber nicht signifikant besser doppelter Genauigkeit reproduzieren. se Differenzen zeigten sich sowohl für die erscheint. Ein unabhängig durchgeführter Die kleine Schrittweite der Prismenver- Richtung als auch für die Distanz, relativ zweiter Versuch, bei dem das Prisma mit drehung schuf bei einzelnen Exemplaren häufig gleichzeitig, weswegen die Ver- der besten Wiederholgenauigkeit ver- offensichtlich auch Situationen mit extre- mutung bestärkt wird, dass dieser Effekt wendet wurde, ergab zwar etwa 20% men Reflexionsverhältnissen, wodurch von der Prismenorientierung abhängig schlechtere Ergebnisse, bezeugt aber die vereinzelt Abweichungen zu den be- ist. Trotz ihrer Grösse störten diese Aus- Stabilität des Versuchsaufbaus während nachbarten Messwerten im Bereich meh- reisser die Ermittlung der Reflektorkor- der Messung und das Vorhandensein rerer Millimeter (d.h. bis zu einem Vielfa- rektionen kaum, weil sie die Koeffizienten einer Exemplarstreuung bezüglich der chen der Reflektorkorrektion) auftraten, der Fourierreihe um nur wenige Prozent Richtungserfassung. Mit dem modifizier- die sich im Rahmen der Doppelmess- beeinflussen. Im Hinblick auf eine zuver- Abb. 6: Reflektorkorrektionskoeffizienten für die Querab- Abb. 7: Distanzabhängigkeit der Höhenkomponente weichung, # 1-4: GRZ4, # 6: modifiziertes GRZ4
Abb. 8: Querabweichung in Abhängigkeit der Prismen- Abb. 9: Fourierkoeffizienten in Abhängigkeit vom Höhen-
orientierung bei einer Visur unter 50° winkel
lässige Anwendung der Reflektorkorrek- spielhaft ist die Darstellung der Korrekti- 10 m, 15 m, 20 m, 30 m, 40 m und 50 m
tion für alle Prismenorientierungen sollten onsfunktion des Exemplars #3 in Abb. 5 wiederholt. Es wurde darauf geachtet,
diese „Ausreisser“ zusätzlich in einem gegeben. Aufgrund der hohen Redun- dass alle Messreihen mit derselben
look-up-table geführt werden. Um die danz und der geringen Standardabwei- Prismenorientierung begonnen wurden.
Gültigkeitsbereiche festzulegen, sind für chung der Gewichtseinheit σ0, die für ei- Die Reproduzierbarkeit einer Beobach-
jeden Reflektor noch weitere Untersu- ne aus den beiden Doppelmessreihen tung während einer Doppelmessreihe für
chungen in kleineren Schrittweiten not- gemittelten Beobachtung gilt und deutlich die Distanz zeigt sich als nicht entfer-
wendig. Dies lohnt sich aber lediglich im Submillimeterbereich liegt, lassen sich nungsabhängig und bestätigt den in Ka-
dann, wenn auch tatsächlich Anwendun- die Koeffizienten mit hoher Zuverlässig- pitel 0 erhaltenen Wert von 0.06 mm.
gen vorliegen, in denen Reflektorkorrek- keit bestimmen; für die Genauigkeit der Hingegen erweist sich die Reproduzier-
turen vorgenommen werden, weswegen Querkomponentenamplituden ergeben barkeit für beide Richtungskomponenten
sich durchschnittlich etwa 0.05 mm, die erwartungsgemäss als distanzabhängig:
an dieser Stelle auf detailliertere Anga-
Höhenkomponente liegt etwas und die bei 5 m beträgt sie sowohl für die Quer-
ben verzichtet wird.
Distanzkomponente liegt deutlich darun- als auch für die Höhenkomponente 0.02
Hinsichtlich der absoluten Abweichungen
ter. Betrachtet man alle durchgeführten mm und wächst bei 50 m auf 0.18 mm
zeigen sich für die Distanz die kleinsten
Messreihen, übertreffen die grössten (quer) bzw. 0.11 mm (Höhe) an.
Beträge (maximal 0.6 mm), die deutlich
Koeffizienten ihre Standardabweichung Der grösste systematische Reflektorkor-
von den Richtungskomponenten über-
im Mittel etwa um das 40- bis 50-fache, rektionsanteil der Längskomponente
troffen werden (gut 6 mm für Querabwei-
womit die Aussagekraft der Reflektorkor- übersteigt zwar die Reproduzierbarkeit
chung und knapp 5 mm für die Höhen-
rektion bestätigt wird. Es kann eine Ex- um Faktor 10, bleibt aber ebenfalls er-
komponente). Diese erweisen sich als
emplarstreuung baugleicher GRZ4 nach- wartungsgemäss entfernungsunabhän-
signifikant in der Fourieranalyse nach (3),
gewiesen (# 1-4 in Abb. 6) und die Wir- gig. Für die Querkomponente nimmt der
wobei die Amplituden für die Frequenz
kung der Modifikation des GRZ4 gezeigt
ω = 6 sowohl für Distanz (0.5 mm bis grösste Schwingungsanteil (mit der
werden (# 6 in derselben Abbildung).
0.6 mm) als auch für die Querkompo- Kreisfrequenz ω = 6) mit zunehmender
nente (2 mm bis 4 mm) und für die Fre- Distanz deutlich ab: von 3 mm bei 10 m
quenz ω = 9 für die Höhe (1.5 mm bis 4.2 Distanzabhängigkeit auf 0.5 mm bei 40 m und 1.2 mm bei
3 mm) jeweils mit Abstand die grössten Um die Distanzabhängigkeit zu untersu- 50 m. Alle übrigen Koeffizienten bleiben
sind. Diese variieren deutlich mit dem chen, wurde der Versuch mit einem unter 1 mm. Für die Höhenkomponente
untersuchten Exemplar (vgl. Abb. 6); bei- Standard-GRZ4 auf den Distanzen 5 m, haben die Kreisfrequenzen 3 und 9 dengrössten Einfluss, wobei sie mit der Ent- ponente optimiert zu sein scheint (vgl. diese jedoch immer nur für eine spezielle
fernung variieren (vgl. Abb. 7). Dies Abb. 9). Es empfiehlt sich, auch hier die Instrumenten-Reflektorkombination an-
deutet darauf hin, dass das funktionale systematischen Anteile als Korrektur zu zunehmen. Erst nach weiteren Untersu-
Modell (2) bei der Verallgemeinerung auf berücksichtigen, da hiermit eine Genau- chungen können Aussagen über die Ex-
360°-Reflektoren zusätzlich um den Pa- igkeitssteigerung von bis zu Faktor 10 emplarstreuung des Instruments gemacht
rameter „Distanz“ oder eine distanzab-
und somit der Submillimeterbereich er- werden, wobei hier noch weitere Effekte
hängige Grösse erweitert werden müss-
reicht werden kann. wie Driften sowohl im Entfernungs- als
te. Ignoriert man die systematisch wir-
auch im Richtungsmessteil berücksichtigt
kenden Anteile, erhöht man die durch
den Reflektor bedingte Unsicherheit der werden sollten. Auch spezielle Aspekte,
Richtungsmessung von σ0 < 0.7 mm auf 5. Abschließende wie das Verhalten bei extrem beein-
2.5 mm und der Höhenmessung von σ0 < Bemerkungen flussten Reflektionsverhältnissen (z.B.
0.5 mm auf 1.8 mm im Entfernungsbe- Mit dem am geomETH entwickelten Ver- Ausreisser bei speziellen Orientierungen)
reich von 5 m bis 50 m, wobei Spitzen- fahren zur automatisierten Bestimmung oder das Verhalten bei herkömmlichen
werte in der Grössenordnung von 4 mm der Reflektorkorrektion lässt sich mit re- Prismen können mit dem automatisierten
bzw. 6 mm auftreten können. lativ geringem Beobachtungsaufwand Verfahren zur Reflektorkorrektion leicht
(weniger als zwei Stunden) ausreichend untersucht werden.
4.3 Einfluss der Visursteilheit Datenmaterial sammeln, um die Eigen-
Im Hinblick auf praktische Anwendungen schaft eines Reflektors unter gegebenen
mit steilen Visuren wurde dieser Aspekt Randbedingungen zu testen. So konnten Literatur:
ebenfalls untersucht, indem der Reflektor in mehr als 20 Messreihen Aussagen für FAVRE, C.; FLACH, PH. [1999]: Stations to-
verschiedene Aspekte abgeleitet werden. tales motorisées: Etat de la technique et per-
unter Höhenwinkeln von ca. 25° und 50°
spectives d'avenir. VPK 3/99, S. 96-100.
positioniert wurde, wobei die Räumlich- Zunächst ist festzuhalten, dass die mei-
FLACH, PH.; NATEROP, D. [1999]: Neue
keiten lediglich eine Horizontaldistanz sten Messungen innerhalb der Herstel- Analysetechniken für Deformationsmessungen
von etwa 7.5 m ermöglichten. In diese lerangaben (3 mm + 3 ppm) bleiben und in permanenten Robotertachymeter-Netzen.
Untersuchung wurde der modifizierte innerhalb der ein- bis zweifachen Win- AVN 8-9 / 1999.
GRZ4 Höhenunterschied (etwa 3.1 m) kelmessgenauigkeit nach DIN 18723 für HAAG, R.; BAYER,G.; ZIMMERMANN, M.;
SCHERRER, R. [1997]: Vermessen mit der
noch einwandfreie Messungen möglich visuell mit dem TCA 1100 durchgeführte
automatischen Feinzielung des TCA 1800 von
waren, gelang es dem Distanzmessmo- Richtungsmessungen liegen. Es muss Leica. VPK 7/97, S.466-471.
dul des Tachymeters bei einer Visur un- jedoch betont werden, dass die hohe in- HEISTER, H. [1988]: Zur Fehlausrichtung von
ter 50° nicht immer, innerhalb von fünf nere Genauigkeit der automatischen Tripelprismen. ZfV, S. 249-258.
Sekunden (gewähltes time-out für die Zielerfassung durchaus den Aufwand der HENNES,M. [1991]: Simultane Selbstkalibrie-
automatisierte Messwerterfassung) eine Bestimmung der Reflektorkorrektion rung periodischer Fehleranteile von Theodoli-
ten. In: VR 5/1991, S.218-228.
Messung durchzuführen. Somit kam es rechtfertigt, um in Präzisionsanwendun-
RÜEGER, J.M. [1990]: Electronic Distance
für beide Prismen innerhalb von jeweils gen nicht durch Vernachlässigen syste-
Measurement. 3rd Ed., Springer-Verlag, Ber-
drei kleinen Verschwenkungsbereichen matischer Effekte Genauigkeitseinbussen lin.
zu Datenausfällen (vgl. Abb. 8). Für alle in Kauf nehmen zu müssen. Deutlich be- SCHMIDT, H. G. [1995]: Die Kalibrierung
drei Komponenten entspricht die Repro- stätigt sich die für herkömmliche Prismen elektrooptischer Distanzmesser am Geodäti-
duzierbarkeit derjenigen bei horizontaler bekannte Tatsache, dass diese nicht hin- schen Institut der RWTH Aachen - eine Bilanz
aus 14 Jahren. VR, S.320-334.
Visur, allerdings treten höhere Abwei- sichtlich aller Anforderungen optimiert
chungen zum Sollwert auf. Diese verhal- sein können. So ist der modifizierte
ten sich zwar noch periodisch, sind aber GRZ4 offensichtlich für horizontale Visu-
wegen der Datenlücken und der Säge- ren und die Höhenkomponente optimiert,
zahnstruktur, die einen deutlich höheren wodurch er sich zum Beispiel für die
Entwicklungsgrad der Fourierreihe erfor- Baumaschinensteuerung besonders eig-
dern würde, nur mit begrenzter Aussage- net; für automatisierte Deformations- Dipl.-Ing. C. Favre
kraft mittels der bisher benutzten Fourier- überwachungen in stark verknüpften Dr.-Ing. M. Hennes
reihe zu modellieren. Beispielhaft sei an- dreidimensionalen Netzen kommen diese Institut für Geodäsie und
hand der Querabweichung für 50° ge- nur in Frage, wenn wirklich die Reflektor- Photogrammetrie
zeigt, dass durchaus ähnliche Strukturen korrektion angebracht wird. Aufgrund von ETH Zürich
bei beiden Exemplaren auftreten, aber zusätzlichen Einflüssen durch z.B. Pha- CH-8093 Zürich
der modifizierte Reflektor nur für hori- sen- und Intensitätsinhomogenitäten im e-mail: favre@geod.baug.ethz.ch
zontale Visuren und für die Höhenkom- Sende- und Empfangssystem der ATR ist e-mail: hennes@geod.baug.ethz.chSie können auch lesen

















































